 利用TMS320F2806型DSP實現太陽光線自動跟蹤控制系統的設計
利用TMS320F2806型DSP實現太陽光線自動跟蹤控制系統的設計
1 引言
精確捕捉太陽光線可提高太陽能裝置,尤其是聚光類太陽能裝置的太陽能利用率。現有的聚光類太陽能發電系統主要采用程序控制、傳感器控制、程序與傳感器聯合控制的方法。程序控制方法是計算出太陽在一天中的位置,并通過電機驅動裝置運動到目標位置,該方法可克服傳感器控制的缺點,但存在累積誤差,且程序復雜,對控制器要求較高;傳感器控制方法是實時測量太陽光的方向,但實際應用中存在跟蹤死區,跟蹤范圍窄;而程序與傳感器混合控制的方法雖然在任何氣候條件下都能得到穩定而可靠的跟蹤控制,但由于成本和可靠性等問題,一直沒有被規模化使用。為更好地采集太陽輻射能量,降低發電成本,提高跟蹤裝置可靠性,這里對太陽光線自動跟蹤方法進行研究,并利用TMS320F2806型DSP為主控制器設計模擬跟蹤控制系統。
2 跟蹤方法
2.1 模擬跟蹤裝置
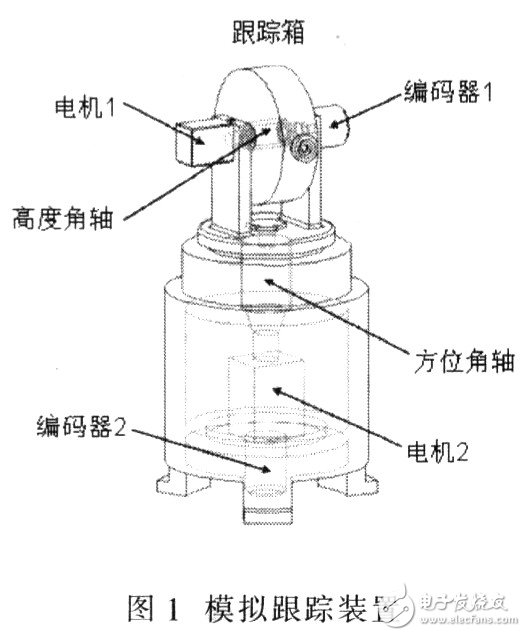
太陽光線的入射角是時刻變化的,為使跟蹤裝置在不同季節、不同日照時間都能精確地捕捉太陽光線人射角,機械結構采用雙軸跟蹤:利用高度角一方位角式全跟蹤,通過兩電機分別控制高度角軸與方位角軸位置,如圖1所示。跟蹤箱內裝有跟蹤傳感器,電機1控制高度角軸,電機2控制方位角軸,兩軸的合成運動使跟蹤鏡頭始終跟隨太陽入射光線。編碼器1、編碼器2分別檢測高度角軸與方位角位置。
3.2 傳感器檢測電路
由跟蹤策略可知,傳感器需要檢測的信號主要包括:光線強度、光電池一三象限電壓差、二四象限電壓差。這里主要介紹電壓差檢測電路。
由于光電池短路電流在很寬的光線強度范圍內與光線強度成線性關系,在設計時利用其短路電流特性。在光電池的輸出端串聯取樣電阻,將電流的變化轉化為輸入電壓的變化。高度角與方位角跟蹤原理相同,以高度角跟蹤電路為例,信號檢測電路如圖3所示。
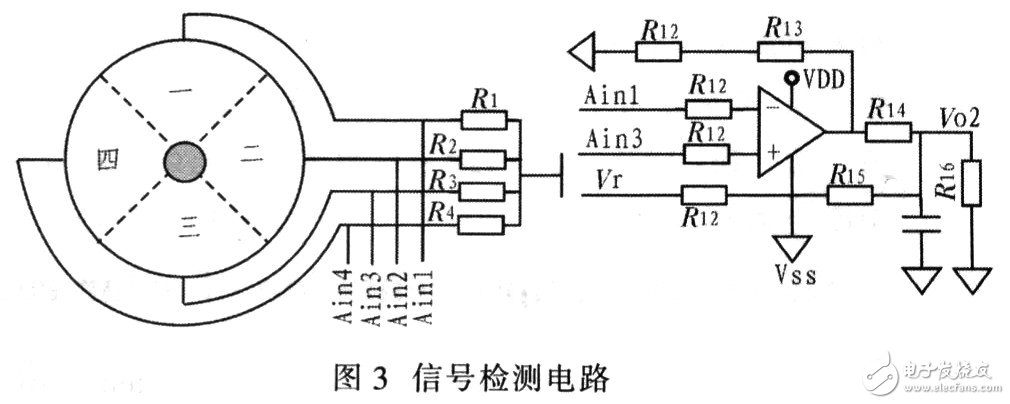
圖3中Ain1、Ain3為采樣輸入端,分別連接光電池一三象限。當太陽光斑在光電池上移動時,光電池上一三象限的輸出電流不等,經過電阻R1、R2采樣后,送入差動放大器。R16為模擬量輸入端的取樣電阻,取電阻R13=R15。
由于所選控制器的模擬輸入電壓范圍為0~3 V,而光線聚焦在光電池上形成光斑后,光電池兩象限的電壓差有正負。因此需在差動放大器同相輸入端加一偏置電壓Vr,使放大器輸出的零點電壓(當放大器兩輸入端均為零時,A/D轉換模塊檢測的電壓值)為1.5 V,以保證模擬輸入電壓始終為正值。根據運放工作在線性區的依據:(1)輸入端電流為零;(2)U+=U-。假設采樣輸入端電壓為Uin1、Uin3,經過計算得到通過R14的電流I為:

A/D轉換器采樣的模擬輸入電壓,即R16兩端電壓為:

當傳感器主光軸對準入射光線高度角時,光電池一三象限壓差Uin1-Uin3=0,此時VO2等于偏置電壓的放大值,即電壓基準值,設其為U,則:


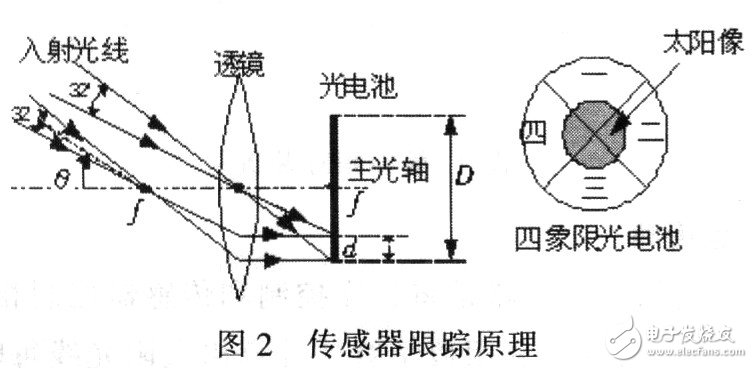
由式(4)和式(5)可知,在光電池直徑恒定,且光斑完全落在光電池上時,若焦距f越大,則d越大,θ越小。即焦距越長,太陽像越大,光電池能檢測的太陽光線范圍越小。
所使用的透鏡焦距為410 mm,光電池直徑為25 mm,根據式(4)和式(5)可計算出光電池的檢測范圍為1.48°,太陽像直徑約為3.8 mm,即當粗跟蹤將傳感器主光軸與太陽入射光線間的夾角調節至1.48°以內時,太陽像便能全部呈現在光電池上,若此時光強滿足設定閾值,則可進入傳感器跟蹤。另外,透鏡焦距會影響傳感器跟蹤分辨率(傳感器能檢測到的最小光線偏移角度),在其他影響因素一定的情況下,增加透鏡焦距,有助于提高傳感器的跟蹤分辨率,但會降低傳感器檢測范圍,此時就需要提高粗跟蹤算法精度。因此,設計時在考慮增加透鏡焦距以提高傳感器分辨率的同時還必須考慮所選粗跟蹤算法的跟蹤精度要與傳感器檢測范圍相吻合,以保證粗跟蹤后太陽光斑能落到光電池上。
4 控制系統實現
該系統采用粗跟蹤與精確跟蹤相結合的方法精確跟蹤太陽光線,并利用TMS28x系列DSP,其具有精度高、速度快、集成度高的特點,內部集成有串行通信模塊、事件管理器、A/D轉換器等模塊,可滿足控制系統各項功能要求。同時,還能實現簡單的浮點運算,并滿足系統粗跟蹤計算要求。圖4為利用TM320F2806型DSP作為主控制器設計的跟蹤系統控制框圖。
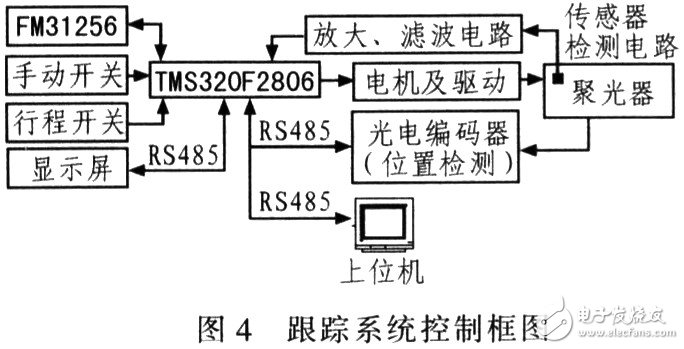
該系統控制硬件主要包括:主控制器、電機及驅動器、跟蹤傳感器、光電編碼器、顯示屏等。系統主要完成粗跟蹤太陽位置計算、跟蹤信號檢測、電機驅動、位置檢測、顯示、監控等功能。對太陽光線的跟蹤分為粗跟蹤與精定位。粗跟蹤由軟件實現,精定位由傳感器實現。粗跟蹤過程中,主控制器根據時間和日期以及觀測點經度、緯度計算出太陽的粗略位置,并與編碼器檢測的跟蹤軸位置相比較,根據兩者的差值輸出控制信號,驅動電機向程序計算的位置運動。跟蹤傳感器主光軸垂直于聚光器接收面,傳感器檢測信號經放大和濾波后由控制器采樣。跟蹤傳感器不斷檢測光電池輸出電壓信號,并將檢測值送至控制器中的A/D轉換模塊,檢測到光線強度滿足跟蹤閾值后,進入傳感器精確跟蹤,并根據電壓差采樣值確定電機轉向及速度。光電編碼器也用于返回精確跟蹤結束后太陽的實際位置。
由于系統需保存各種參數,如位置校準值、當地地理參數等,擴展1個I2C總線鐵電存儲器用于數據存儲。行程開關用于為系統提供極限位置保護。系統的各種跟蹤信息可通過RS485總線傳輸至上位機,同時上位機也可實現控制跟蹤裝置,包括開始跟蹤、回零點、停止等命令。當前跟蹤信息,如顯示跟蹤數據、電機的運行狀態、A/D轉換值及各種故障信號,都可在現場通過顯示屏顯示,通過顯示屏或手動開關實現手動操作跟蹤裝置,調試方便。
5 結論
本文設計的跟蹤控制系統使用程序控制和傳感器控制相結合的方法,實現精確跟蹤太陽光線,其特點是:(1)DSP系統具有較好的穩定性,且運算速度快,利用其內部的時間管理器模塊簡單有效地控制電機運動。(2)具有相應的人機界面,可實現相應參數的顯示和遠程控制。而在跟蹤方法方面,具有以下特點:(1)粗跟蹤采用簡單算法實現,避免單一的程序控制對現場控制器高數據處理能力和大數據存儲空間的要求;(2)單一的程序控制需要兩個運動軸的高精度角度傳感器作為本地定位檢測,而這里所用策略的精確跟蹤過程南傳感器完成,降低程序控制時系統對角度傳感器的精度要求;(3)跟蹤范圍廣,傳感器結構簡單,價格低廉,跟蹤穩定。
-
傳感器
+關注
關注
2548文章
50698瀏覽量
752040 -
dsp
+關注
關注
552文章
7962瀏覽量
348281 -
太陽能
+關注
關注
37文章
3385瀏覽量
114085
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論