 基于Microchip高效的變頻洗碗機的設計方案
基于Microchip高效的變頻洗碗機的設計方案
引言
目前洗碗機業已站在普及風口,有數據顯示,歐美發達國家的洗碗機的普及率為60%~70%,中國市場普及率不足3%。再與國內較為普及的洗衣機相比,2017年洗衣機的產銷量為4000萬臺,洗碗機為100萬臺左右。可見洗碗機的市場前景非常廣闊。
近年來,隨著國家節能減排,低噪環保等政策的實施,人們對產品性能要求的提高。定頻技術向變頻技術轉變將成為未來的發展趨勢。隨著變頻空調,變頻風扇,變頻洗衣機等變頻家電在節能低噪性能上優勢顯著,人們對變頻家電的接受度也逐步提高。變頻洗碗機也應運而生。
貝能國際力推Microchip高效的變頻電機解決方案——dsPIC33EP系列帶DSP引擎的16-bitMCU。變頻洗碗機應用是其中之一。
近年來,隨著國家節能減排,低噪環保等政策的實施,人們對產品性能要求的提高。定頻技術向變頻技術轉變將成為未來的發展趨勢。隨著變頻空調,變頻風扇,變頻洗衣機等變頻家電在節能低噪性能上優勢顯著,人們對變頻家電的接受度也逐步提高。變頻洗碗機也應運而生。貝能國際力推Microchip高效的變頻電機解決方案——dsPIC33EP系列帶DSP引擎的16-bitMCU。變頻洗碗機應用是其中之一。
1Microchip變頻洗碗機方案系統
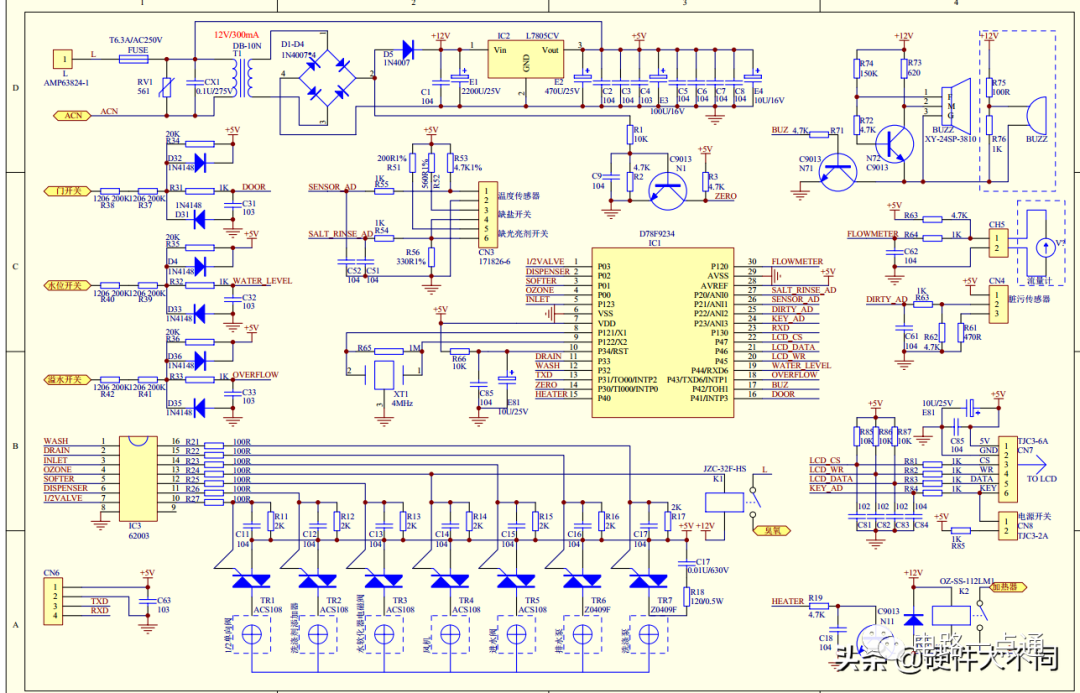
如圖1所示,主控MCU用44管腳的dsPIC33EP64MC204,采用無傳感器FOC控制技術對洗滌泵PMSM電機實現矢量控制和無極調速。同時對溫度、濁度、水量等傳感器進行實時監控,實現對進水量和洗滌水溫精準控制,達到高效節能低噪性能。

2dsPIC33EP系列MCU功能特點
?工作條件:3.0V~3.6V,-40℃~+85℃,DC至70MIPS。
?內核。16位內核,高效代碼型(C和匯編)架構;兩個40位寬累加器;帶雙數據取操作的單周期(MAC/MPY);單周期混合符號乘法和硬件除法;32位乘法支持。
?功耗管理。有低功耗管理模式(休眠、空閑和打盹),具有0.6mA/MHZ動態電流(典型值);30uAIPD電流(典型值);高速PWM;最多具有3對使用獨立時序的PWM;上升沿和下降沿死區;7.14nsPWM分頻率;PWM支持,可用于直流/直流、交流/直流、逆變器、PFC和照明,或者BLDC、PMSM、ACIM和SRM;可編程故障輸入;用于ADC轉換的靈活觸發配置。
?模擬特性。ADC模塊方面,可配置為10位1.1Msps,4個S/H(采樣/保持);或配置為12位500ksps,1個S/H(采樣/保持)。具有靈活、獨立的ADC觸發源。最多具有3個直接連到ADC模塊的運放/比較器。
?其他外設,有正交編碼器接口、UART、SPI、ECAN、輸入捕捉、輸出比較和定時器,并有用戶可選優先級仲裁功能的4通道DMA。
3dsPIC33EP32MC204在變頻洗碗機電機控制應用
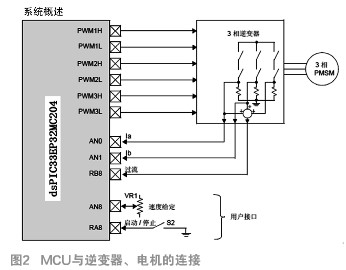
3.1系統概述
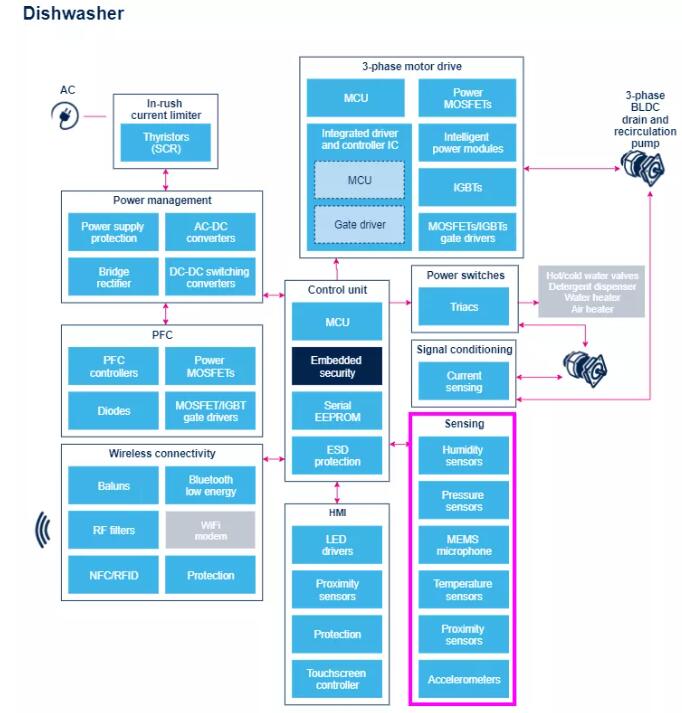
如圖2所示,在電機軸上沒有安裝位置傳感器,而使用低自感系數的分流電阻(3相逆變器的一部分)來測量電機上的電流。3相逆變器被用作功率級來驅動電機繞組。3相逆變器內置的電流檢測和故障生成電路可防止整個系統受到過電流的損壞。圖3列出了如何實現3相拓撲以及電流檢測和故障生成電路。

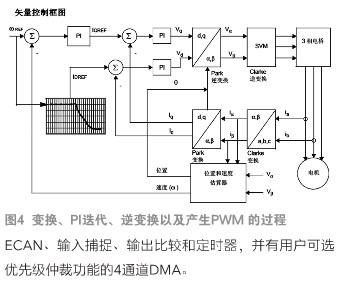
間接矢量控制的過程如下:
1.測量3相定子電流。。這些測量可得到Ia和Ib的值。可通過以下公式計算出Ic:Ia+Ib+Ic=0。2.將3相電流變換至3軸系統。該變換將得到變量Iα和Iβ,它們是由測得的Ia和Ib以及計算出的Ic值變換而來。從定子角度來看,Iα和Iβ是相互正交的時變電流值。
3.按照控制環上一次迭代計算出的變換角,來旋轉2軸系統使之與轉子磁通對齊。Iα和Iβ變量經過該變換可得到Id和Iq。Id和Iq為變換到旋轉坐標系下的正交電流。在穩態條件下,Id和Iq是常量。
4.誤差信號由Id、Iq的實際值和各自的參考值進行比較而獲得。
?Id的參考值控制轉子磁通;
?Iq的參考值控制電機的轉矩輸出;
?控制器的輸出為Vd和Vq,即要施加到電機上的電壓矢量
5.估算出新的變換角,其中Vα、Vβ、Iα和Iβ是輸入參數。新的角度可告知FOC算法下一個電壓矢量在何處。
6.通過使用新的角度,可將PI控制器的Vd和Vq輸出值逆變到靜止參考坐標系。該計算將產生下一個正交電壓值Vα和Vβ。7.Vα和Vβ值經過逆變換得到3相值Va、Vb和Vc。該3相電壓值可用來計算新的PWM占空比值,以生成所期望的電壓矢量。圖4顯示了變換、PI迭代、逆變換以及產生PWM的整個過程。
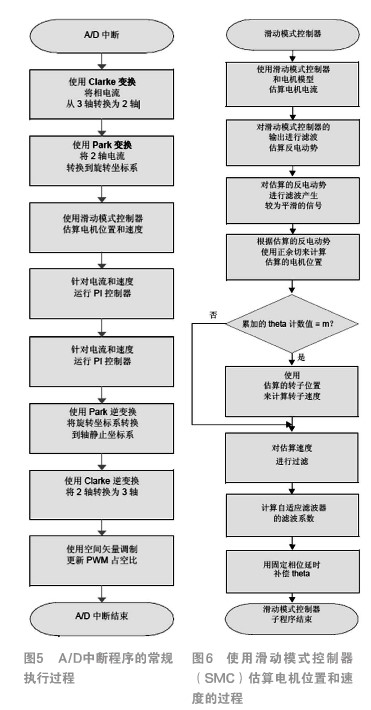
3.3軟件流程圖
FOC算法以與PWM相同的速率執行。這樣進行配置使得PWM可使用兩個分流電阻器來同時觸發兩個繞組的A/D轉換。允許A/D中斷來執行FOC算法。圖5顯示了A/D中斷程序的常規執行過程。圖6給出了使用滑動模式控制器(SMC)估算電機位置和速度的過程。
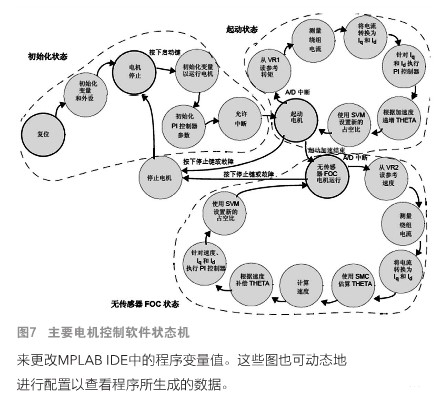
3.4主要電機控制軟件狀態機
如圖7所示。首先,變頻洗碗機系統上電,系統就將進入初始化狀態,所有的變量都設置為其初始值,同時允許中斷,使電機繞組斷電。系統等待用戶按下啟動/停止按鈕。然后執行起動程序,由此程序控制轉矩電流分量(Iq)和磁通電流分量(Id),并以加速形式產生換相角度(theta),從而使電機轉動。執行完啟動程序之后,系統將切換到無傳感器FOC控制,其中速度控制器被添加到執行線程中,隨后滑動模式控制器(SMC)開始估算theta值,方法如圖7所述。電機進入無傳感器FOC控制狀態后,根據用戶或系統要求提供參考速度實時調整電機轉速。實時監控停止按鍵和系統的任何故障,讓電機能及時關閉,保護系統安全。狀態圖顯示了軟件的所有不同狀態,以及使系統轉換到不同狀態的條件
3.5數據監視和控制界面
Microchip的MPLABIDE編譯環境可提供一個調試工具——數據監視和控制界面(DMCI),可通過這一個界面對IDE項目中的范圍值、開/關狀態或離散值進行變量控制以對應用的運行加以限制。如果需要,應用反饋可以圖形方式來表示,可直觀觀察電機控制的各種參數變量的變化,有效加快用戶開發調試進程。該界面提供了可識別項目的程序符號(變量)導航,這些符號可被動態地分配給滑塊控制、直接輸入控制或布爾量控制的任意組合。隨后這些控制可交互地用來更改MPLABIDE中的程序變量值。這些圖也可動態地進行配置以查看程序所生成的數據。
5結論
基于MicrochipdsPIC33EP在變頻洗碗機電機FOC控制的主要優點如下。
1.使用這種通用設計平臺可獲得較高的實用性(Microchip的FOC核心算法全部開源),從而更有效地生產電器產品。這意味著電器制造商現在可運用更經濟的方法,通過無傳感器FOC算法控制,生產出一系列使用PMSM或其他類型的電機的電器型號。
2.使用這些基于軟件的電機控制設計,只需更改控制參數即可快速進行定制以滿足不同市場的需求。適合電器產品平臺化開發。
3.由于編程dsPIC33EP與編程MCU的方法相似,因此電器設計者可以快速設計出自己的電機控制算法并測試產品的原型。由于使用了功能強大的基于MPLABIDE的工具(例如DMCI),允許設計者方便地將其算法移植到各種電機平臺上,其中包括PMSM、BLDC、BDC和ACIM,因而精細調諧電機控制變得非常便捷。
-
dsp
+關注
關注
551文章
7824瀏覽量
346832 -
mcu
+關注
關注
146文章
16667瀏覽量
347780 -
電機
+關注
關注
141文章
8772瀏覽量
143771
發布評論請先 登錄
相關推薦
洗碗機電路原理圖 低成本洗碗機電路設計方案
霍爾元件 SS2309 在洗碗機中的應用案例
洗碗機好用嗎?洗碗機的效果比手動洗碗更高效
怎樣選購洗碗機
原裝IC網UPD78F9234洗碗機解決方案
消費升級 助力洗碗機行業發展
洗碗機和消毒柜的區別淺析
洗碗機哪個牌子好?最新洗碗機十大排名讓你放心選!
洗碗機歷史悠久發展快速 創新走進中式廚房
如何選購一款好的洗碗機
洗碗機是一款比較復雜的家電產品,洗衣機方案淺析
專業級洗碗機問世,卡薩帝發布“新物種”中子和美





 工商網監
工商網監
評論