") 深度解讀開關(guān)電源的平均電流、滯回電流模式
深度解讀開關(guān)電源的平均電流、滯回電流模式
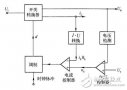
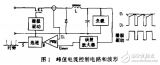
圖1為平均電流模式的控制系統(tǒng)圖,K為檢測(cè)電流放大器,CEA為電流誤差放大器,VEA為電壓誤差放大器。輸出電壓通過分壓電阻器接到電壓誤差放大器的反相端,VEA同相端接參考電壓Vref,輸出的電壓誤差信號(hào)經(jīng)VEA放大后輸出,電壓值為Vc。Vc連接到電流誤差放大器CEA的同相端,輸出電流信號(hào)由Rs取樣,經(jīng)電流放大器K放大后,輸出到電流誤差放大器CEA的反相端,電流信號(hào)和輸出電壓誤差信號(hào)在電流誤差放大器CEA內(nèi)進(jìn)行比較然后放大,輸出為Ve,Ve送到PWM比較器的反相端,與PWM比較器的同相端的鋸齒波進(jìn)行比較,輸出PWM關(guān)斷信號(hào)。振蕩電路產(chǎn)生PWM的開通時(shí)鐘信號(hào),同時(shí)輸出信號(hào)給鋸齒波發(fā)生器以產(chǎn)生相應(yīng)的鋸齒波。
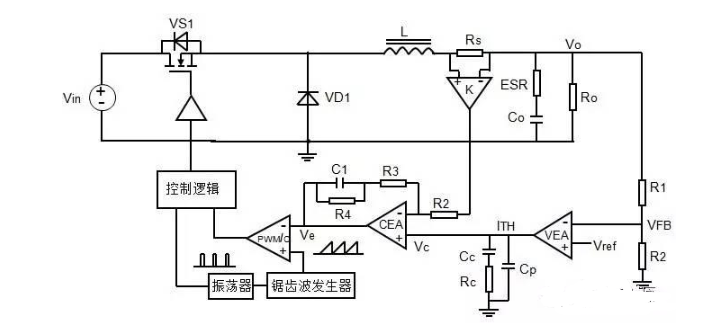
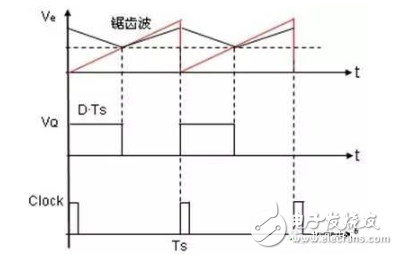
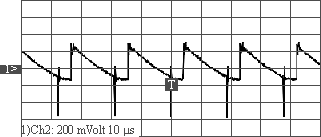
電流信號(hào)為向上的鋸齒波,反相放大后,Ve為向下斜坡信號(hào),Ve向下斜坡信號(hào)與鋸齒波向上斜坡信號(hào)相等時(shí),PWM信號(hào)的關(guān)斷,如圖2所示。當(dāng)輸入電壓的增加,電感電流信號(hào)上升的斜率提高,因此Ve的下降斜率更陡峭,從而使占空比變窄。電壓外環(huán)用于補(bǔ)償由負(fù)載變化引起的輸出電壓變化,由于電感電流由VEA處理,系統(tǒng)表現(xiàn)為一個(gè)單極點(diǎn)響應(yīng),從而簡化了電壓補(bǔ)償環(huán)路。
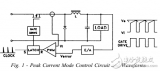
峰值電流模式中,電流檢測(cè)信號(hào)直接與電壓誤差信號(hào)進(jìn)行比較,電流檢測(cè)信號(hào)沒有經(jīng)過電流放大器的處理,因此峰值電流模式中,容易受到電流信號(hào)前沿尖峰噪聲的干擾。而平均電流模式中,輸出電流的波形帶有鋸齒波分量,與電壓誤差信號(hào)進(jìn)行比較放大時(shí),電流誤差放大器CEA的外接的補(bǔ)償網(wǎng)絡(luò)會(huì)對(duì)電流信號(hào)做平均化的處理,從而得到代表跟蹤平均電流的誤差信號(hào)控制PWM信號(hào)的關(guān)斷。此外,高頻的電流信號(hào)前沿尖峰噪聲會(huì)被濾除,PWM比較器之后的SR鎖存器可避免由噪聲引起的信號(hào)跳變,從而消除了由于噪聲尖峰而過早關(guān)斷MOSFET的可能。
由于Ve為向下的斜坡,這也意味著在反饋環(huán)中加入了一定的斜坡補(bǔ)償,從而避免次諧波振蕩,當(dāng)占空比超過50%時(shí)不需要斜坡電壓補(bǔ)償。
由圖2可知,若Ve上升的斜率大于三角鋸齒波信號(hào)的斜率,系統(tǒng)失去交點(diǎn)將無法平衡,會(huì)發(fā)生諧振和不穩(wěn)定,因此要控制電感電流的下降斜率,從而保證Ve上升的斜率必須小于三角鋸齒波信號(hào)的斜率,同時(shí)Ve信號(hào)的值也不能超過斜坡電壓。
電感電流的下降的斜率為:
di/dt = L*Vo
Ve上升的斜率為:
K*Rs*GCEA*Vo/L
Rs為電流檢測(cè)電阻,K為電流放大器增益,GCEA為CEA的增益,Vs為三角鋸齒波信號(hào)幅值,fs為開關(guān)周期。
若CEA是具有較高的輸出阻抗的跨導(dǎo)放大器,則補(bǔ)償?shù)腞C網(wǎng)絡(luò)可以直接連接到CEA的輸出端和地之間,
GCEA = Gm*RG
Gm為跨導(dǎo)放大器的跨導(dǎo),RG為跨導(dǎo)放大器直流輸出阻抗,即跨導(dǎo)放大器輸出端所接RC補(bǔ)償網(wǎng)絡(luò)中的電阻。CEA的直流增益應(yīng)該盡可能高,以精確處理直流輸出電流。對(duì)于直流,補(bǔ)償網(wǎng)絡(luò)中的電容相當(dāng)于開路,CEA直流增益最大。
平均電流模式控制的優(yōu)點(diǎn):
(1)平均電感電流能夠高度精確地跟蹤電流信號(hào)。
(2)不需要斜坡補(bǔ)償。
(3)優(yōu)越的抗噪聲性能。
(4) 適合于任何電路拓?fù)洹?br />
(5)容易調(diào)試。
(6)易于實(shí)現(xiàn)均流。
(7)高di/dt動(dòng)態(tài)響應(yīng),適合低壓大電流輸出應(yīng)用。
平均電流模式控制的缺點(diǎn):
(1)電流放大器在開關(guān)頻率處的增益有最大限制。
(2)雙閉環(huán)放大器帶寬、增益等配合參數(shù),設(shè)計(jì)調(diào)試復(fù)雜。
2 滯回電流模式的工作原理及特點(diǎn)
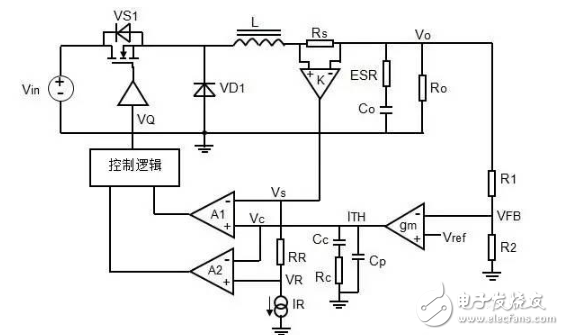
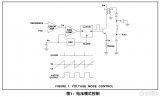
圖3為滯回電流模式的控制原理圖,滯回電流模式也是雙環(huán)控制,外環(huán)是電壓環(huán),輸出電壓經(jīng)分壓電阻器分壓后與參考電壓進(jìn)行比較,然后經(jīng)電壓誤差放大器放大,圖中為跨導(dǎo)型放大器,電壓誤差放大器的輸出信號(hào)為Vc,Vc連接到比較器A1的同相端和A2的反相端。A1比較器控制開關(guān)管的開通,A2比較器控制開關(guān)管的關(guān)斷。
電流檢測(cè)信號(hào)經(jīng)電流放大器K放大后輸出為Vs,Vs連接到A1的反相端,同時(shí)Vs-IR*RR信號(hào)值連接到A1的同相端。
下面分析其工作過程:
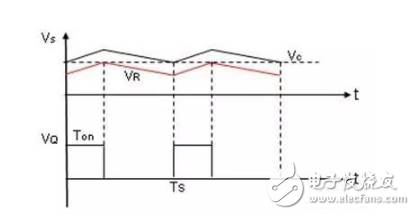
(1)若初始的狀態(tài)是開關(guān)管導(dǎo)通,電感的電流線性上升,但是此時(shí),Vs-IR*RR電壓低于Vc,Vs也電壓低于Vc,A2輸出低電平,A1輸出高電平,控制邏輯電路輸出上管的驅(qū)動(dòng)信號(hào),開關(guān)管導(dǎo)通。
(2)電感電流繼續(xù)上升,Vs的電壓上升,當(dāng)Vs-IR*RR電壓低于Vc,同時(shí),Vs電壓高于Vc,此時(shí),A2輸出低電平,A1也輸出低電平,控制邏輯電路保持輸出上管的驅(qū)動(dòng)信號(hào),上開關(guān)管保持導(dǎo)通。
(3)當(dāng)電感電流繼續(xù)上升,使Vs-IR*RR電壓高于Vc,Vs電壓也高于Vc,此時(shí),A2輸出高電平,A1輸出低電平,控制邏輯電路關(guān)斷上管的驅(qū)動(dòng)信號(hào),上開關(guān)管關(guān)斷。
(4)開關(guān)管關(guān)斷后,電感電流下降,使Vs-IR*RR電壓低于Vc,Vs電壓高于Vc,此時(shí),A2輸出低電平,A1輸出低電壓,控制邏輯電路保持開關(guān)管關(guān)斷。
(5)電感電流繼續(xù)下降,使Vs-IR*RR電壓低于Vc,Vs電壓也低于Vc,此時(shí),A2輸出低電平,A1輸出高電壓,控制邏輯電路輸出上管的驅(qū)動(dòng)信號(hào),開關(guān)管導(dǎo)通,進(jìn)入下一個(gè)開關(guān)周期,如此反復(fù)。
由上述原理可見,滯回電流模式為變頻控制,電流環(huán)產(chǎn)生二個(gè)檢測(cè)電壓信號(hào)。
滯回電流模式的優(yōu)點(diǎn):
(1)不需要斜坡補(bǔ)償。
(2)穩(wěn)定性好,不會(huì)因?yàn)樵肼暜a(chǎn)生不穩(wěn)定的振蕩。
滯回電流模式的缺點(diǎn):
(1)需要對(duì)電感電流全周期的檢測(cè)和控制。
(2)變頻控制容易產(chǎn)生變頻噪聲,電感設(shè)計(jì)難以優(yōu)化。
-
電流
+關(guān)注
關(guān)注
40文章
6757瀏覽量
131880 -
開關(guān)電源
+關(guān)注
關(guān)注
6448文章
8289瀏覽量
480712 -
變換器
+關(guān)注
關(guān)注
17文章
2087瀏覽量
109143
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
電流控制的開關(guān)電源系統(tǒng)
平均電流模式控制PWM
開關(guān)電源變換器工作模式--平均電流、滯回電流模式
平均電流/滯環(huán)電流模式PWM反饋控制模式的基本工作原理
基于雙電流控制模式的開關(guān)電源的設(shè)計(jì)
開關(guān)電源中的電流型控制模式
電流控制模式多路輸出開關(guān)電源的研制
低壓大電流開關(guān)電源的設(shè)計(jì)
平均電流模式控制開關(guān)電源
開關(guān)電源拓?fù)浣Y(jié)構(gòu)電流模式與電壓模式的比較 中文版
平均電流、滯回電流模式的工作原理及特點(diǎn)資料下載






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論