 超聲波電子導盲電路的工作原理
超聲波電子導盲電路的工作原理
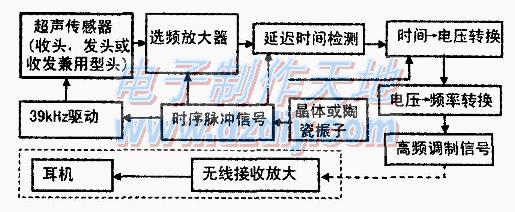
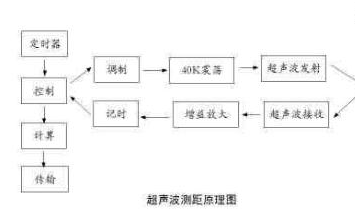
本設計是在盲人或弱視者雙腳的鞋底上安裝電子裝置,用超聲傳感器精確測量鞋底前掌中心與地面的距離,將距離轉換為時間,再將時間轉換為電壓,由壓控振蕩器產生聲頻振蕩,其頻率與距離相關。再經過無線傳到盲人頭部的接收電子裝置,驅動耳機,雙鞋的共用一個信道,因為走路兩腳不能同時離地,左/右只有一路工作.當抬起一只腳時,鞋底上的傳感器檢測到大于10厘米就有聲頻產生,距離越大,聲調(頻率)越高,平地走路聲調高低變化平緩。下樓梯時,腳抬起一前邁——下落,能正常聽到聲調高低較大的變化.遇到深坑大于30cm聲調會很尖,起提示作用。其原理框圖如下圖所示。
1.時序信號的產生
因為用電池供電,電壓隨著使用時間會逐步下降。
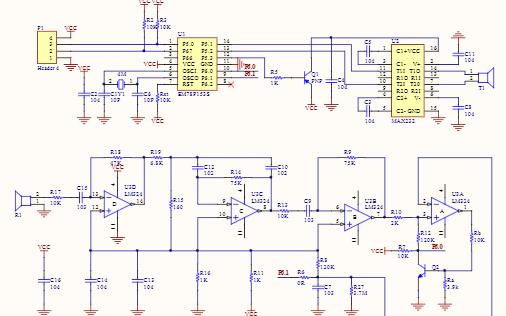
用通常的RC振蕩器頻率不穩定。用通常收音機的465kHz的陶瓷振子產生振蕩,再經過12分頻,得到39kHz信號,再經過一系列的分頻可以得到所需得各種時序脈沖信號。4069內部只有一級CMOS反相器,一般稱非緩沖門,用“UB”表示,適合做32KHz到465kHz的晶體振蕩器,下圖中R2的負反饋使UID工作在線性放大區,約為1/2電源電壓。UID第9腳有一個微弱的變化經過UID,UIE兩級反相,得到同相位的放大r的信號,經過X2三端陶瓷濾波器,只有465kHz的信號能通過,正反饋到UID第9腳。形成連續的振蕩。這時如果取走R2照舊有振蕩。沒有R2,剛接通電源時UID第9腳可能只有零點幾伏,第8腳輸出高,UIE第11腳低。
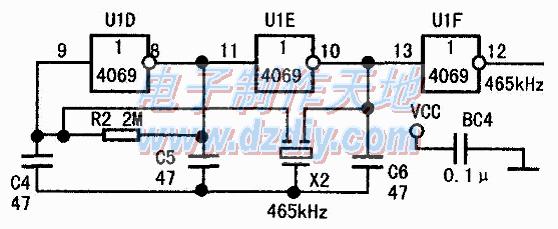
處于開關狀態,不能對小信號放大。不起振。偶爾觸一下第9腳可能開始工作,但不一定穩定。可見R2的作用把UID第9腳電平拉到線性區。如果把74HC04代替4069,因為74HC04內部每個門有三級反相門,接上R2后已經形成奇數級環形振蕩器的結構,即使沒有X2已經有若干兆赫茲的振蕩。接上X2也難達到目的。C4,C5,C6是匹配電容。還可以微調頻率。接上后實際頻率為470kHz。
U2是D觸發器,時鐘從低到高時Q的狀態等于D。如果把Q和D連接起來,就成為二分頻器,時鐘每來一次翻轉一次。開始,Q=0O,Q=1,D=Q就等于1,時鐘來一次,Q變成1,Q=0,D=Q就等于0,為下一次時鐘來Q變成0做好準備。時鐘變二次,Q變一次,就是二分頻器。把兩級D觸發器串聯起來,就成為四分頻器。現在要三分頻,就要加一定的反饋。簡單的方法如下圖所示。U2A是二分頻器,其輸出,Q1送U2B的時鐘,Q1變O,Q1變1,Q2就翻轉。沒有反饋時Q2Q1的狀態是00,01,10,11。等到11狀態立即清0,與非門U3D兩個輸入端都為1,輸出0,U3C輸出1,D觸發器清0。
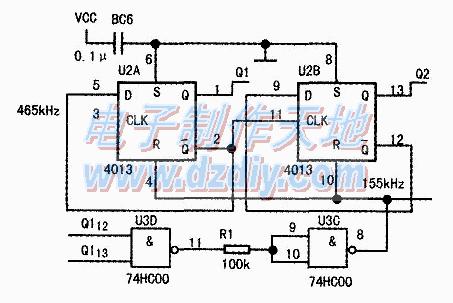
R1的作用是延遲,加寬清0脈沖到300ns,1/3信號可以從U3C輸出,也可以用Q2,不能用Q1。
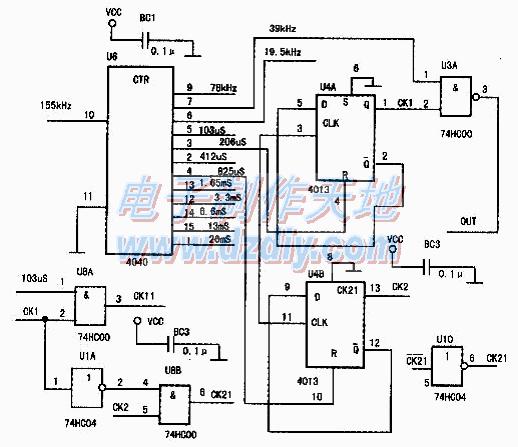
155kHz信號送到12級二進制異步計數器4040的U6的第10腳時鐘端。異步計數器相當于12個接成二分頻的D觸發器串起來,上一級從1向0變化時下一級才能翻轉,每級有5差不多500ns的傳輸延遲,而且逐級累積。下圖是各級波形圖,顯然,周期為206us的信號先從1變0,3.3ms周期的信號延遲約3μs從0變l,觸發U4A、U4B翻轉輸出為1。
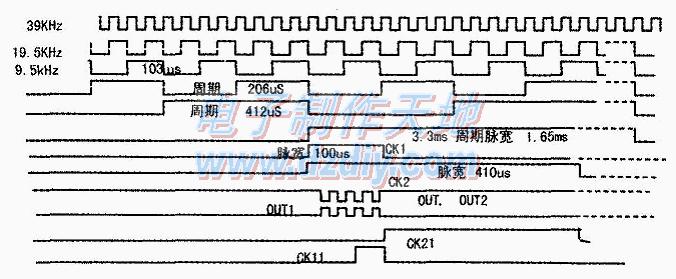
在周期為206μs的信號的負脈沖期間,時間等于103μs-3μs,U4A輸出CK1維持1,在206μs的信號的正脈沖期間,信號接U4A的第4腳R端,CK1清0,這種狀態一直要等待3.3ms,周期性的觸發信號再次來到,才重復出現一次。CK1的脈寬100μs,周期3.3ms。
同樣,可以分析CK2的脈寬410μs,周期3.3ms。因為清0信號的極性問題,下圖的4013不能用74HC74代替。
4040的第7腳輸出39kHz信號和CK1通過U3A合成含有4個脈沖的OUT信號,送驅動級。CK1和103}Ls通過U3A合成CK11,是CK1正脈沖的后一半為高的,周期為3.3ms的信號。CK21則是CK2正脈沖的后一半為高的,周期為3.3ms的信號。這些信號以后都有用。
2、發射驅動電路
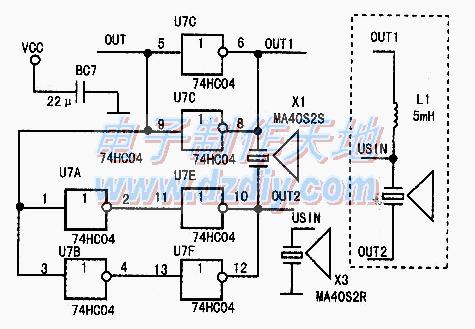
因為超聲傳感器的輸入電容達2700pF之多,低壓下用單個CMOS反相門驅動效果差,現在用兩兩并聯推挽驅動(如下圖所示)。虛框中是用收發兩用頭L1的電路。當發射時,L1和傳感器串聯諧振,加強發射;當接收時,OUT1和OUT2固定電平相當于交流接地,L1和傳感器并聯諧振,加強接收信號。理論上想得很好,實際試驗效果很差。所以后面試驗都是收發兩個頭做的。兩個頭并列安裝,距離2.5cm,出口離地最小1cm,由于超聲波長8.5mm.出口前加有0.5mm粗的金屬防護條不會影響效果。
3、接收放大電路
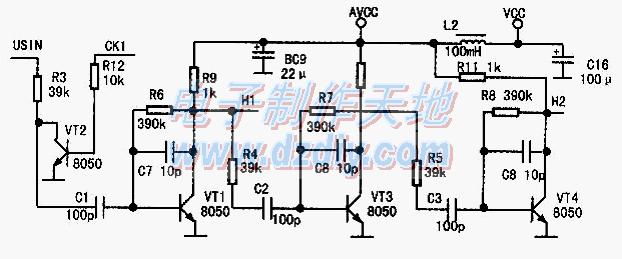
上圖的三級5倍帶通濾波器的計算與設計與上期類似,不過這里用晶體管代替運算放大器,原理是一樣的,可以更省電,體積更小。信號從USIN進入,當CKl:1時,發射期間,VT2短路信號,防止強信號竄入放大器。放大的信號從Hl,H2輸出。
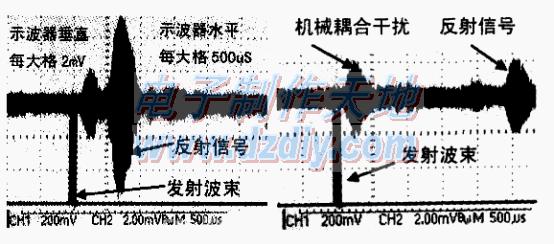
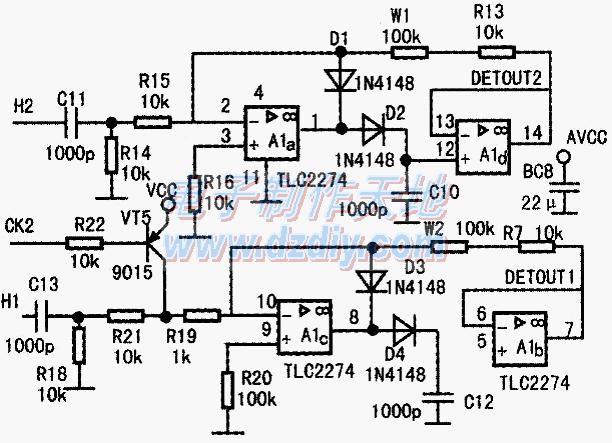
由于安裝在同一塊印制板上,有機械耦合。從中圖、下圖看出,在發射信號后300μs處有一個固定的接收峰(機械耦合),這個信號小于7cm距離地面的反射波信號,而與距離20~30cm的反射波信號大小相仿。而且背景雜音頻率39kHz幅度約1mV。檢測有一定難度。我們按信號強度Hl、H2分兩段檢波,按延遲時間(距離)分成三種情況分析:①距離地面7cm的情況,輸入信號特別大,經過一級放大已經超過200mV(Vpp)這時把信號從Hl送到第一檢波器。檢波器檢測到有信號,就有DETOUT2=1。這時第二檢波器可能也收到信號(信號在410us處兩邊各一半).也可能收不到信號。②距離地面7cm~30cm,接收到的信號因距離由近到遠而從很大逐步減小,最后被1mV(Vpp)的背景雜音淹沒。同時信號的延遲從410μ~33mS放大器的放大倍數125倍,雜音放大到125mV,信號250mV以上時被第一檢波器檢測到,DETOUT1=1。這時DETOUT2:0,DETOUT1=l或0(較遠情況)③距離地面30cm~50cm,信號檢測不到,DETOUT2=DETOUT1=0。第一種情況,要求靜音;第二種情況,要求變調發聲;如果接收不到就同③;第三種情況要求發出警告性音調的聲音。圖中C16,L1,BC9用于電源濾波作用。
4.檢波放大電路
一般的二極管檢波器,由于二極管的正向壓降而有損耗,特別是小信號情況。下圖利用運算放大器的高增益,抵消了二極管的正向壓降損耗實現理想檢波。
H2的負半周經過Ala反相放大成為很大的正信號,通過D4到達Alb的正極性輸入端,C12充電到峰值,Alb接成跟隨器電路,第7腳信號永遠和第5腳一致。R17和W2串聯負反饋到A1c的第10腳。這時D3因反偏不起作用。Ala反相放大是有限制的,根據運算放大器的“虛開”和“虛短”的假設,在峰值時,14腳通過R17+W2反饋到2腳的電流和H2通過R15的電流之和為零。UH2/R15+U14/(R17+W2)=0,U14/UH2=-(R17+W2)/R15=-1~-10倍。H2負半周而又小于峰值時,反饋電流絕對值超過輸入電流,把2腳拉高,1腳變低,D3導通吸收反饋電流。維持2腳和3腳電壓相同。(虛短)當正半周情況,Ala反相放大輸出1為低,D4不通,D3導通吸收正半周電流。調節電位器可以控制檢波增益。
CK2=0期間VT5導通,檢波輸入端被拉高,輸出DETOUT1=0。為了滿幅度輸出,這里要用所謂“軌至軌”
CMOS運放,用LM324不行。市售TLC2274常見SOD封裝形式的,試驗時做一個替換座轉成DIP便于插拔。
5.距離-脈寬-數字轉換
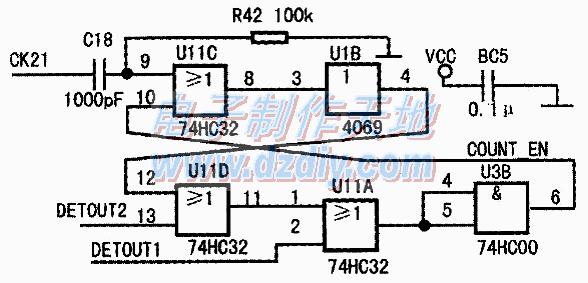
電路如上圖所示,CK21是S信號,CK21正脈沖上升時間,通過U11C=1,UIB=0,U1D=OU3B=1(指輸出端),COUNT_EN=1(開始計數)返回到U11C的輸入端完成—個R-S觸發器的置位過程,雖然CK21上沖消失,依然存在置位狀態。DETECT2是R信號,DETECT2=1,U11D=1,U3B=0,U11C=0,UIB=1;復位狀態,COUNT_EN=0(停止計數)。DETECT1是優先復位信號,不論CK21有沒有上沖,只要有DETECT1=1,就有COUNT_EN=0。
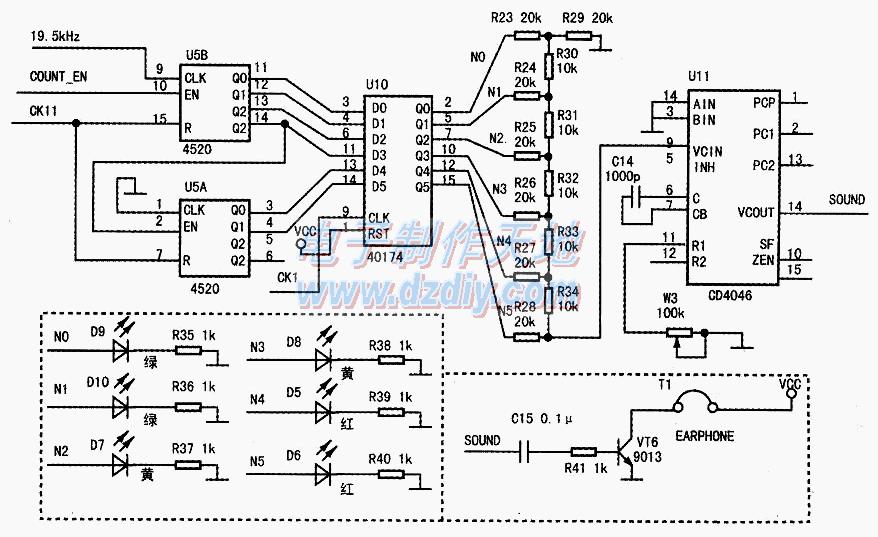
在下圖中,U5-4520是雙16進制計數器,COUNT_EN控制計數閘門,COUNT_EN的脈寬就含有多少個19.5KHz,就計多少數。這個數在CK1的上升時間,被鎖存在U10-40174中。然后CK11來,把計數器清零,為下一次計數作準備。CK1上升時間與CK11有50uS的時間間隔。U5B與U5A的級聯,U5B - Q3要接到U5A-EN,即用下降沿計數,U5B - Q3從1到0,高一位的計數加l。不能用CP。在試驗階段暫時將D5~ Dl0接入,檢測N5~ NO的狀態。這是典型的6位二進制數,N5~ NO= 000000~111111,表示距離由近到遠。
6.數字-電壓-音調轉換電路。
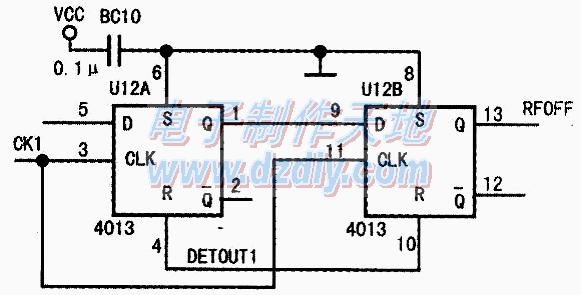
下圖中R23~ R34構成R- 2R梯形D/A轉換電路,關于其原理,教科書中有敘述,這里不再重復。電阻用5圈色環的,最后一圈是棕色的(1%)即可,最好用數字萬用表測一下,挑選阻值接近標稱值使用。N5~N0= 000000,對應輸出電壓0,N5~N0:111111,對應輸出電壓VCC乘63/64。共有64種不同電平。因為CK2的脈寬410uS期間不會有檢波信號,實際0.8的數據不存在。4046是一塊鎖相環,主要用途是:數字頻率合成、相位鑒別、V-F轉換等。我們只用其V-F轉換功能。直流電平加到U11 - 4046的壓控振蕩器的輸入端9腳,電壓越高,振蕩頻率越高。選擇合適C14和調節W3,可以調節頻率,該電阻電容影響V-F特性曲線的斜率。最高頻率是輸入Vcc情況,調到FMax=5KHZ,當輸入9/64Vcc時音調下降到100HZ或更低,為了在下端能聽到較高音調,在U11的12腳接一個100K -500K電阻,調到Fmin=100HZ。該電阻的接入影響V-F特性曲線向上平移動一個固定值。試驗中可以VT6和耳機聽。試驗完后將SOUND接到無線發送模組。為了雙腳交替發射,當某腳著地時,該腳的DETOUT1=1,U12A,B均清零,如右圖所示。不管CK1是否來.RFOFF -直為0,關斷該腳的無線發送模組。抬起腳,DETOUT1=0,CK1來兩次,D觸發器把Vcc從5腳的D送到1腳的Q,再送到13腳的Q,使RFOFF變高,啟動該腳的無線發送模組。由于走路時不能兩腳同時離地,只有抬起的腳有發射,實現雙腳輪流導盲的目的。
設計時注意要在每塊數字電路的電源到地之間接一個旁路電容器BCn。似乎沒有多大用處。其實從提高可靠性來說很重要。因為各個信號都集中在某些時鐘跳變的時刻變化,這時CMOS電路內部的NMOS管,PMOS管都導通,而且電平的跳變要對負載充放電,這個時刻電源電流突然很大,印刷電路板引線的分布電感阻礙電流突變,電源電壓就瞬時下降,如果這時這塊電路所有輸出高電平的管腳上都帶一個下跳的尖毛刺。同樣地線的引線的分布電感造成所有輸出低電平的管腳帶一個上跳的尖毛刺。為了防止這種情況發生,旁路電容器BCn接在電路的VDD與GND之間,由于電容的電壓不能跳變,大大減少了毛刺的發生。當然這個電容不能離開被保護的電路太遠。
-
電路
+關注
關注
172文章
5852瀏覽量
171942 -
超聲波
+關注
關注
63文章
2991瀏覽量
138250
發布評論請先 登錄
相關推薦
超聲波傳感器的工作原理
超聲波傳感器的工作原理
如何采用STC89C52單片機實現超聲波紅外避障語音導盲儀設計
超聲波傳感器模塊的工作原理是什么
超聲波模塊的工作原理與時序圖學習
基于超聲波傳感器的導盲杖設計
超聲波導盲儀設計原理是什么?超聲波電子導盲手杖的設計資料概述
基于51單片機超聲波紅外避障語音導盲儀設計(全套資料)






 工商網監
工商網監
評論