 雷賽控制卡與步進驅動器如何連接
雷賽控制卡與步進驅動器如何連接
本文主要是關于雷賽控制卡與步進驅動器的相關介紹,并著重對雷賽控制卡與步進驅動器的連接進行了詳盡的闡述。
步進驅動器
步進電機驅動器是一種將電脈沖轉化為角位移的執行機構。當步進驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度(稱為“步距角”),它的旋轉是以固定的角度一步一步運行的。可以通過控制脈沖個數來控制角位移量,從而達到準確定位的目的;同時可以通過控制脈沖頻率來控制電機轉動的速度和加速度,從而達到調速和定位的目的。廣泛應用于雕刻機、水晶研磨機、中型數控機床、腦電繡花機、包裝機械、噴泉、點膠機、切料送料系統等分辨率較高的大、中型數控設備上。
步進驅動器相數
步進電機的相數是指電機內部的線圈組數,常用的有二相、三相、四相、五相步進電機。電機相數
不同,其步距角也不同,一般二相電機的步距角為1.8度、三相為1.2度、五相的為0.72度。在沒有細分驅動器時,用戶主要靠選擇不同相數的步進電機來滿足步距角的要求。如果使用細分驅動器,則相數將變得沒有意義,用戶只需在驅動器上改變細分數,就可以改變步距角。
保持轉矩
驅動器細分后將對電機的運行性能產生質的飛躍,但是這一切都是由驅動器本身產生的,和電機及控制系統無關。在使用時,用戶唯一需要注意的一點是步進電機步距角的改變,這一點將對控制系統所發的步進信號的頻率有影響,因為細分后步進電機的步距角將變小,要求步進信號的頻率要相應提高。以1.8度步進電機為例:驅動器在半步狀態時步距角為0.9度,而在十細分時步距角為0.18度,這樣在要求電機轉速相同的情況下,控制系統所發的步進信號的頻率在十細分時為半步運行時的5倍。
步進電機精度
一般步進電機的精度為步進角的3~5%。步進電機單步的偏差并不會影響到下一步的精度,因此步進電機精度不累積。
外表溫度
步進電機溫度過高首先會使電機的磁性材料退磁,從而導致力矩下降甚至于丟失。因此電機外表允許的最高溫度應取決于不同電機磁性材料的退磁點。一般來說,磁性材料的退磁點都在130攝氏度以上,因此步進電機外表溫度在80~90攝氏度完全正常。
常見問題
問題
噪聲大
解決方法
A、如步進電機正好工作在共振區,可通過改變減速比提高步進電機運行速度。
B、采用帶有細分功能的驅動器,這是最常用的,最簡便的方法。因為細分型驅動器電機的相電流變化較半步型平緩。
C、換成步距角更小的步進電機,如三相或五相步進電機,或兩相細分型步進電機。
D、換成直流或交流伺服電機,幾乎可以完全克服震動和噪聲,但成本較高。
E、在電機軸上加磁性阻尼器,市場上已有這種產品,但機械結構改變較大。
雷賽控制卡與步進驅動器如何連接
為了幫助使用者更好地了解雷泰公司運動控制卡、步進電機驅動器的特點,掌握運動控制卡與步進驅動器的連接方法,本文主要概述了脈沖輸出模式、脈沖輸出驅動方式的概念,講述了運動控制卡與步進驅動器的連接方法,并對幾個典型的故障案例進行了分析,指導使用者自行排查問題,完成自動控制系統構建。
一、脈沖輸出模式與脈沖輸出驅動方式
1、 脈沖輸出模式
雷泰運動控制卡支持兩種脈沖輸出模式:一是單脈沖(脈沖+方向),一種是雙脈沖(CW+CCW),可以通過調用運動控制卡的底層函數進行設定。
圖1-2 雙脈沖模式脈沖輸出
2、脈沖輸出驅動方式
雷泰運動控制卡支持兩種脈沖輸出方式:一是單端輸出,一是差分輸出,可以通過運動控制卡上的跳線開關進行選擇。
二、雷泰運動控制卡與步進電機驅動器的連接方法
雷泰運動控制卡與步進電機驅動器的連接方式只有兩種:一是單端接法;一是差分接法。由于雷泰公司所有的運動控制卡對單端、差分接法都是支持的,因此,在實際應用中,具體采用哪種接線方法,只取決于電機驅動器的接口特點。
如雷賽公司步進電機驅動器M415B只支持單端接法,則運動控制卡(本文以雷泰運動控制卡DMC2410為例進行說明)與M415B的配線只能如
1、運動控制卡內部跳線設置為單端輸出。
2、步進電機驅動器的公共端OPTO、PUL、DIR分別接控制卡的PC+5V(PUL+或DIR+),PUL-、DIR-。
雷賽公司步進電機驅動器MD556對單端接法、差分接法均支持,則運動控制卡與MD556的配線可以采用單端接法或差分接法(為了提高抗干擾能力,建議采用差分接法)。
1、運動控制卡內部跳線設置為差分輸出。
2、步進電機驅動器的公共端PUL+、PUL-、DIR+、DIR-分別接控制卡的PUL+、PUL-、DIR+、DIR-。
1、運動控制卡內部跳線設置為單端輸出。
2、步進電機驅動器的公共端PUL+、PUL-、DIR+、DIR-分別接控制卡的PUL+、PUL-、DIR+、DIR-。
三、雷泰控制卡與驅動器連接的故障案例分析及其解決辦法
1、 案例一
現象:
無論運動控制卡給步進驅動器發送正向脈沖還是負向脈沖,電機都能跑,但只往一個方向運動,
原因:
根據故障現象可以判斷:運動控制卡的脈沖輸出模式為單脈沖,驅動器為雙脈沖模式。運動控制卡的脈沖輸出模式與驅動器的脈沖接收模式不一致。因此,當控制卡發正向脈沖,如圖3-1所示,脈沖從控制卡的PUL端輸出,由于控制卡的PUL與驅動器的PUL相連,這時驅動器的PUL端有脈沖輸入,則電機正轉。當控制卡發負向脈沖,如圖3-2所示,脈沖還是從控制卡的PUL端輸出,然后從驅動器的PUL端輸入,則電機還是按原來的方向運動。
解決辦法:
把運動控制卡的脈沖輸出模式改為雙脈沖或把驅動器的脈沖模式設置為單脈沖模式。讓控制卡的脈沖模式與驅動器的脈沖模式保持一致。
2、案例二
現象:
運動控制卡給驅動器發送正向脈沖,電機正轉正常。運動控制卡給驅動器發送負向脈沖,電機不能運動。
原因:
根據故障現象可以判斷:運動控制卡的脈沖輸出模式為雙脈沖,驅動器為單脈沖模式。運動控制卡的脈沖輸出模式與驅動器的脈沖接收模式不一致。因此,當控制卡發正向脈沖,如圖3-3所示,脈沖從控制卡的PUL端輸出,由于控制卡的PUL與驅動器的PUL相連,這時驅動器的PUL端有脈沖輸入,則電機正轉。當控制卡發負向脈沖,如圖3-4所示,脈沖從控制卡的DIR端輸出,然后從驅動器的DIR端輸入,驅動器的PUL端沒有接收到脈沖輸入,則電機停止不動。
解決辦法:
讓控制卡的脈沖模式與驅動器的脈沖模式保持一致。
3、案例三
現象:
運動控制卡給驅動器發送正向脈沖,電機抖動。運動控制卡給驅動器發送負向脈沖,電機反轉正常。
原因:
經查實:運動控制卡與驅動器的脈沖模式均為單脈沖模式,控制卡的脈沖輸出與驅動器的脈沖輸入模式是匹配的;但驅動器的需要單端驅動方式輸入,而運動控制卡的跳線設置為差分輸出,控制卡與驅動器的脈沖輸出/輸入驅動方式不一致。因此,當控制卡發正向脈沖時,如圖3-5所示,驅動器的PUL和DIR都有脈沖輸入,電機抖動。當控制卡發負向脈沖時,如圖3-6所示,驅動器的PUL輸入脈沖信號,DIR輸入電平信號,電機運轉正常。
解決辦法:
通過板卡上的跳線開關,把運動控制卡設置為單端輸出。
淺談雷賽控制卡應用程序開發
雷賽智能一貫堅持“硬件是質量的保證,軟件是應用的基礎”的準則,在提高硬件質量的同時,不斷強化軟件系統的完善,不斷加強對客戶開發應用系統的支持,努力做到產品的可靠、易用。這里就客戶使用雷賽開發應用軟件過程做以簡單指導,如有更多需求,請與我公司聯絡以獲得更好的技術支持。
使用雷賽運動控制卡的設備控制系統結構如圖3-1所示:
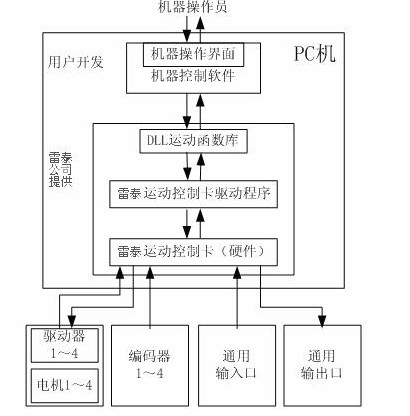
圖1 基于雷賽運動控制卡的設備控制系統結構
從上面的結構圖可以看出,控制系統的工作原理可以簡單描述為:
1. 操作員的操作信息通過操作界面(包括顯示屏和鍵盤)傳遞給系統控制軟件;
2. 系統控制軟件將操作信息轉化為運動參數并根據這些參數調用DLL庫中運動函數;
3. 運動函數調用雷賽運動控制卡驅動程序發出控制指令給控制卡;
4. 雷賽運動控制卡再根據控制指令發出相應的驅動信號(如脈沖、方向信號)給驅動器及電機、讀取編碼器數據、讀/寫通用輸入/輸出口。
用戶在開發應用軟件(即系統控制軟件)的過程中所需要做的就是針對上面所說的第1步和第2步進行編程。雷賽公司已提供支持各款運動控制卡的硬件驅動程序和DLL運動函數庫,包括控制卡初始化函數、單軸及多軸控制函數、輸入/輸出脈沖模式設置函數等許多函數。這些函數提供了所有與運動控制相關的功能,使用極為方便。用戶不需要更多了解硬件電路的細節以及運動和插補的計算細節,就能夠使用C、C++、Visual Basic等程序語言調用這些函數來快速開發出自己的應用軟件。
用戶編寫的系統控制軟件的典型流程如圖3-2所示:
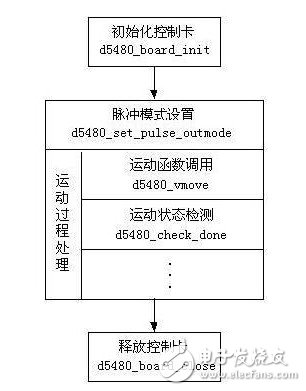
圖2 系統控制軟件的典型流程
我們以雷賽DMC5480卡為例,介紹在VB和VC環境下針對雷賽運動控制卡編程方法:(使用雷賽其他型號的控制卡,方法和步驟相同)
Visual Basic 6.0環境下的軟件開發介紹
請確保DMC5480運動控制卡已經插入到你的計算機插槽中,已安裝好驅動程序,并用Motion5480演示軟件確認硬件系統工作正常。
安裝好VB軟件,但在開始編寫DMC5480運動控制軟件前,需要做下面幾項工作:
1 建立自己的工作目錄,如:d:\vbMotion(此目錄名可以自己指定)。
2 將DMC5480.bas文件拷貝到該目錄下(此文件在軟件CD的module目錄下可以找到)。
3 運行VB,并建立一個工程,然后保存此新建的工程在vbMotion目錄中。
4 按下述步驟,將運動函數庫鏈接到你的工程項目中:
在VB編譯器的“工程(P)”菜單中選擇“添加模塊”;
選擇“現存”;
選擇“DMC5480.bas”;
選擇“確定”。
當您將運動函數鏈接到你的工程項目中后,就可以象調用其它API函數一樣直接調用運動函數,每個函數的具體功能,請參考軟件手冊中的 “運動函數說明”,當然還可以打開模塊文件DMC5480.bas了解每個函數的具體定義。
在編程過程中,您可以參閱我們提供的運動函數編程實例:我們提供了VB的編程實例源代碼,存放在光盤的Samples目錄下(也可以通過網站下載)。只要您將控制卡及其驅動軟件安裝好,即可直接運行這些源代碼。
Visual C++ 6.0環境下的軟件開發介紹
請確保DMC5480運動控制卡已經插入到你的計算機插槽中,安裝好驅動程序,Motion5480演示軟件和VC軟件,在調用DMC5480運動函數之前,需要做下面幾項工作:
1. 啟動Motion5480演示軟件,進行運動控制卡控制功能的簡單測試,如:單軸定長運動等,以確定DMC5480運動控制卡軟硬件安裝正常。
2. 運行VC,并建立一工程,將工程命名為vcMotion(注:此工程名可以自己指定);
3. 將DMC5480.lib和DMC5480.h文件拷貝到該目錄下(此文件在module目錄下);
4. 將運動函數鏈接到你的工程項目中,將DMC5480.lib加入到工程中;
5. 在調用運動函數的文件頭部代碼中加入#include “DMC5480.h”語句。
當你將運動函數鏈接到你的項目中后,你就可以象調用其它API函數一樣,調用運動函數,每個函數的具體功能,請軟件手冊中的“運動函數說明”。當然,還可以打開頭文件DMC5480.h了解每個函數的具體定義。
在編程過程中,您可以參閱我們提供的運動函數編程實例。我們提供的VC的編程實例源代碼,存放在光盤的Samples目錄下(也可以通過網站下載)。只要您將控制卡及其驅動軟件安裝好,即可直接運行這些源代碼。
結語
關于雷賽控制卡與步進驅動器的相關介紹就到這了,如有不足之處歡迎指正。
-
驅動器
+關注
關注
51文章
7998瀏覽量
145029 -
步進電機
+關注
關注
150文章
3042瀏覽量
146864
發布評論請先 登錄
相關推薦
labview無法控制伺服運動控制卡
雷賽DMC1380運動控制卡能被檢測到,但無法控制電機運行?
DMC2410控制卡用labview2014編程時,控制卡的初始化狀態讀取不到,讀不到卡,不知是什么原因?
運動控制卡做上位機,控制伺服驅動器時,伺服驅動器需要設置什么?
求購雷賽運動控制卡江蘇地區回收整套伺服驅動回收施耐德模塊
求購全新雷賽控制卡廣州本地收購傳感器回收全新伺服驅動全套回收
基于C#的運動控制卡的馬達控制 精選資料分享
高價回收基恩士視覺系統回收SMC雷賽控制器控制卡
利用運動控制卡搭建運動控制平臺






 工商網監
工商網監
評論