 淺析工業機器人控制技術與精密減速器技術
淺析工業機器人控制技術與精密減速器技術
工業機器人控制技術
我國工業機器人的市場主要集中在汽車、汽車零部件、摩托車、電器、工程機械、石油化工等行業。中國作為亞洲第三大的工業機器人需求國,市場發展穩定,汽車及其零部件制造仍然是工業機器人的主要應用領域,隨著我國產業結構調整升級不斷深入和國際制造業中心向中國的轉移,我國的機器人市場會進一步加大,市場擴展的速度也會進一步提高。本文就當前工業機器人的關鍵技術及其應用進行梳理。
機器人控制技術
機器人控制系統是機器人的大腦,是決定機器人功能和性能的主要因素。工業機器人控制技術的主要任務就是控制工業機器人在工作空間中的運動位置、姿態和軌跡、操作順序及動作的時間等。具有編程簡單、軟件菜單操作、友好的人機交互界面、在線操作提示和使用方便等特點。
關鍵技術包括:
(1)開放性模塊化的控制系統體系結構:采用分布式CPU計算機結構,分為機器人控制器(RC),運動控制器(MC),光電隔離I/O控制板、傳感器處理板和編程示教盒等。機器人控制器(RC)和編程示教盒通過串口/CAN總線進行通訊。機器人控制器(RC)的主計算機完成機器人的運動規劃、插補和位置伺服以及主控邏輯、數字I/O、傳感器處理等功能,而編程示教盒完成信息的顯示和按鍵的輸入。
(2)模塊化層次化的控制器軟件系統:軟件系統建立在基于開源的實時多任務操作系統Linux上,采用分層和模塊化結構設計,以實現軟件系統的開放性。整個控制器軟件系統分為三個層次:硬件驅動層、核心層和應用層。三個層次分別面對不同的功能需求,對應不同層次的開發,系統中各個層次內部由若干個功能相對對立的模塊組成,這些功能模塊相互協作共同實現該層次所提供的功能。
(3)機器人的故障診斷與安全維護技術:通過各種信息,對機器人故障進行診斷,并進行相應維護,是保證機器人安全性的關鍵技術。
(4)網絡化機器人控制器技術:目前機器人的應用工程由單臺機器人工作站向機器人生產線發展,機器人控制器的聯網技術變得越來越重要。控制器上具有串口、現場總線及以太網的聯網功能。可用于機器人控制器之間和機器人控制器同上位機的通訊,便于對機器人生產線進行監控、診斷和管理。
移動機器人(AGV)
移動機器人(AGV)是工業機器人的一種類型,它由計算機控制,具有移動、自動導航、多傳感器控制、網絡交互等功能,它可廣泛應用于機械、電子、紡織、卷煙、醫療、食品、造紙等行業的柔性搬運、傳輸等功能,也用于自動化立體倉庫、柔性加工系統、柔性裝配系統(以AGV作為活動裝配平臺);同時可在車站、機場、郵局的物品分撿中作為運輸工具。
國際物流技術發展的新趨勢之一,而移動機器人是其中的核心技術和設備,是用現代物流技術配合、支撐、改造、提升傳統生產線,實現點對點自動存取的高架箱儲、作業和搬運相結合,實現精細化、柔性化、信息化,縮短寧波物流流程,降低物料損耗,減少占地面積,降低建設投資等的高新技術和裝備。
點焊機器人
焊接機器人具有性能穩定、工作空間大、運動速度快和負荷能力強等特點,焊接質量明顯優于人工焊接,大大提高了點焊作業的生產率。
點焊機器人主要用于汽車整車的焊接工作,生產過程由各大汽車主機廠負責完成。國際工業機器人企業憑借與各大汽車企業的長期合作關系,向各大型汽車生產企業提供各類點焊機器人單元產品并以焊接機器人與整車生產線配套形式進入中國,在該領域占據市場主導地位。
隨著汽車工業的發展,焊接生產線要求焊鉗一體化,重量越來越大,165公斤點焊機器人是目前汽車焊接中最常用的一種機器人。2008年9月,機器人研究所研制完成國內首臺165公斤級點焊機器人,并成功應用于奇瑞汽車焊接車間。2009年9月,經過優化和性能提升的第二臺機器人完成并順利通過驗收,該機器人整體技術指標已經達到國外同類機器人水平。
弧焊機器人
弧焊機器人主要應用于各類汽車零部件的焊接生產。在該領域,國際大型工業機器人生產企業主要以向成套裝備供應商提供單元產品為主。本公司主要從事弧焊機器人成套裝備的生產,根據各類項目的不同需求,自行生產成套裝備中的機器人單元產品,也可向大型工業機器人企業采購并組成各類弧焊機器人成套裝備。在該領域,本公司與國際大型工業機器人生產企業既是競爭亦是合作關系。
關鍵技術包括:
(1)弧焊機器人系統優化集成技術:弧焊機器人采用交流伺服驅動技術以及高精度、高剛性的RV減速機和諧波減速器,具有良好的低速穩定性和高速動態響應,并可實現免維護功能。
(2)協調控制技術:控制多機器人及變位機協調運動,既能保持焊槍和工件的相對姿態以滿足焊接工藝的要求,又能避免焊槍和工件的碰撞。
(3)精確焊縫軌跡跟蹤技術:結合激光傳感器和視覺傳感器離線工作方式的優點,采用激光傳感器實現焊接過程中的焊縫跟蹤,提升焊接機器人對復雜工件進行焊接的柔性和適應性,結合視覺傳感器離線觀察獲得焊縫跟蹤的殘余偏差,基于偏差統計獲得補償數據并進行機器人運動軌跡的修正,在各種工況下都能獲得最佳的焊接質量。
激光加工機器人
激光加工機器人是將機器人技術應用于激光加工中,通過高精度工業機器人實現更加柔性的激光加工作業。本系統通過示教盒進行在線操作,也可通過離線方式進行編程。該系統通過對加工工件的自動檢測,產生加工件的模型,繼而生成加工曲線,也可以利用CAD數據直接加工。可用于工件的激光表面處理、打孔、焊接和模具修復等。
關鍵技術包括:
(1)激光加工機器人結構優化設計技術:采用大范圍框架式本體結構,在增大作業范圍的同時,保證機器人精度;
(2)機器人系統的誤差補償技術:針對一體化加工機器人工作空間大,精度高等要求,并結合其結構特點,采取非模型方法與基于模型方法相結合的混合機器人補償方法,完成了幾何參數誤差和非幾何參數誤差的補償。
(3)高精度機器人檢測技術:將三坐標測量技術和機器人技術相結合,實現了機器人高精度在線測量。
(4)激光加工機器人專用語言實現技術:根據激光加工及機器人作業特點,完成激光加工機器人專用語言。
(5)網絡通訊和離線編程技術:具有串口、CAN等網絡通訊功能,實現對機器人生產線的監控和管理;并實現上位機對機器人的離線編程控制。
真空機器人
真空機器人是一種在真空環境下工作的機器人,主要應用于半導體工業中,實現晶圓在真空腔室內的傳輸。真空機械手難進口、受限制、用量大、通用性強,其成為制約了半導體裝備整機的研發進度和整機產品競爭力的關鍵部件。而且國外對中國買家嚴加審查,歸屬于禁運產品目錄,真空機械手已成為嚴重制約我國半導體設備整機裝備制造的“卡脖子”問題。直驅型真空機器人技術屬于原始創新技術。
關鍵技術包括:
(1)真空機器人新構型設計技術:通過結構分析和優化設計,避開國際專利,設計新構型滿足真空機器人對剛度和伸縮比的要求;
(2)大間隙真空直驅電機技術:涉及大間隙真空直接驅動電機和高潔凈直驅電機開展電機理論分析、結構設計、制作工藝、電機材料表面處理、低速大轉矩控制、小型多軸驅動器等方面。
(3)真空環境下的多軸精密軸系的設計。采用軸在軸中的設計方法,減小軸之間的不同心以及慣量不對稱的問題。
(4)動態軌跡修正技術:通過傳感器信息和機器人運動信息的融合,檢測出晶圓與手指之間基準位置之間的偏移,通過動態修正運動軌跡,保證機器人準確地將晶圓從真空腔室中的一個工位傳送到另一個工位。
(5)符合SEMI標準的真空機器人語言:根據真空機器人搬運要求、機器人作業特點及SEMI標準,完成真空機器人專用語言。
(6)可靠性系統工程技術:在IC制造中,設備故障會帶來巨大的損失。根據半導體設備對MCBF的高要求,對各個部件的可靠性進行測試、評價和控制,提高機械手各個部件的可靠性,從而保證機械手滿足IC制造的高要求。
潔凈機器人
潔凈機器人是一種在潔凈環境中使用的工業機器人。隨著生產技術水平不斷提高,其對生產環境的要求也日益苛刻,很多現代工業產品生產都要求在潔凈環境進行,潔凈機器人是潔凈環境下生產需要的關鍵設備。
關鍵技術包括:
(1)潔凈潤滑技術:通過采用負壓抑塵結構和非揮發性潤滑脂,實現對環境無顆粒污染,滿足潔凈要求。
(2)高速平穩控制技術:通過軌跡優化和提高關節伺服性能,實現潔凈搬運的平穩性。
(3)控制器的小型化技術:根據潔凈室建造和運營成本高,通過控制器小型化技術減小潔凈機器人的占用空間。
(4)晶圓檢測技術:通過光學傳感器,能夠通過機器人的掃描,獲得卡匣中晶圓有無缺片、傾斜等信息。
轉載聲明:此文章素材來源于「工大易服」
工業機器人常用精密減速器技術分析
工業機器人是一種裝備有記憶裝置和末端執行裝置的、能夠完成各種移動或工藝來代替人類勞動的通用機器。通常在生產中能代替工人做某些單調、頻繁和重復的長時間作業,或是危險、惡劣環境下的作業。它能夠提升生產的效率和產品的質量,是企業補充和替代勞動力的有效方案。
目前工業機器人發展特點是高速、精確、機身機構緊湊、多自由度和提高剛性,重點領域還要求重載或響應速度快。例如汽車整車生產的電焊機器人負載大部分在150-300Kg間,而電子領域的裝配機器人則需要快速的響應流水線上的配件。
減速器在機械傳動領域是連接動力源和執行機構之間的中間裝置,通常它把電動機、內燃機等高速運轉的動力通過輸入軸上的小齒輪嚙合輸出軸上的大齒輪來達到減速的目的,并傳遞更大的轉矩。目前成熟并標準化的減速器有:圓柱齒輪減速器、渦輪減速器、行星減速器、行星齒輪減速器、RV減速器、擺線針輪減速器和諧波減速器。80-90年代以來,在新興產業如航空航天、機器人和醫療器械等發展的需求下,需要結構簡單緊湊、傳遞功率大、噪聲低、傳動平穩的高性能精密減速器,其中RV減速器和諧波減速器是精密減速器中重要的兩種減速器。
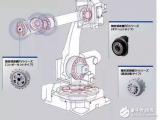
精密減速器應用領域
六軸工業機器人中精密減速器位置分布
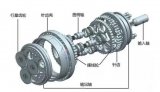
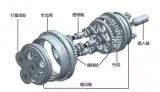
RV(Rot-Vector)減速器
RV減速器是在擺線針輪傳動基礎上發展起來的,具有二級減速和中心圓盤支承結構。自1986年投入市場以來,因其傳動比大、傳動效率高、運動精度高、回差小、低振動、剛性大和高可靠性等優點是機器人的“御用”減速器。
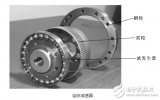
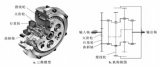
Nabotesco(帝人)RV系列減速器結構圖
Nabotesco(帝人)RV系列減速器
諧波減速器
諧波減速器由三部分組成:諧波發生器、柔性論和剛輪,其工作原理是由諧波發生器使柔輪產生可控的彈性變形,靠柔輪與剛輪嚙合來傳遞動力,并達到減速的目的;按照波發生器的不同有凸輪式、滾輪式和偏心盤式。諧波減速器傳動比大、外形輪廓小、零件數目少且傳動效率高。單機傳動比可達到50-4000,而傳動效率高達92%-96%。
HarmonicaDrive產品結構示意圖
HarmonicaDriveCSF-LW系列產品
三種常見的諧波減速器類型
諧波傳動嚙合示意圖
普通齒輪傳動嚙合示意圖
行星減速器
行星顧名思義行星減速器就是有三個行星輪圍繞一個太陽輪旋轉的減速器。行星減速器體積小、重量輕,承載能力高,使用壽命長、運轉平穩,噪聲低。具有功率分流、多齒嚙合獨用的特性;是一種用途廣泛的工業產品,其性能可與其它軍品級行星減速器產品相媲美,卻有著工業級產品的價格,被應用于廣泛的工業場合。
精密減速器在工業機器人上的作用
工業機器人的動力源一般為交流伺服電機,因為由脈沖信號驅動,其伺服電機本身就可以實現調速,為什么工業機器人還需要減速器呢?工業機器人通常執行重復的動作,以完成相同的工序;為保證工業機器人在生產中能夠可靠地完成工序任務,并確保工藝質量,對工業機器人的定位精度和重復定位精度要求很高。因此,提高和確保工業機器人的精度就需要采用RV減速器或諧波減速器。精密減速器在工業機器人中的另一作用是傳遞更大的扭矩。當負載較大時,一味提高伺服電機的功率是很不劃算的,可以在適宜的速度范圍內通過減速器來提高輸出扭矩。此外,伺服電機在低頻運轉下容易發熱和出現低頻振動,對于長時間和周期性工作的工業機器人這都不利于確保其精確、可靠地運行。
精密減速器的存在使伺服電機在一個合適的速度下運轉,并精確地將轉速降到工業機器人各部位需要的速度,提高機械體剛性的同時輸出更大的力矩。與通用減速器相比,機器人關節減速器要求具有傳動鏈短、體積小、功率大、質量輕和易于控制等特點。大量應用在關節型機器人上的減速器主要有兩類:RV減速器和諧波減速器。
相比于諧波減速器,RV減速器具有更高的剛度和回轉精度。因此在關節型機器人中,一般將RV減速器放置在機座、大臂、肩部等重負載的位置;而將諧波減速器放置在小臂、腕部或手部;行星減速器一般用在直角坐標機器人上。
數據 | 工業機器人系統集成商市場現狀分析
工業機器人系統集成商處于機器人產業鏈的下游應用端,為終端客戶提供應用解決方案,其負責工業機器人應用二次開發和周邊自動化配套設備的集成,是工業機器人自動化應用的重要組成。
近幾年,由于國內工業機器人市場的快速發展,工業機器人系統集成商數量急速擴張,截止到2017年底,工業機器人系統集成商數量超過3000家,而在2014年9月份,該數據還未超過500。并且國內集成商規模都不大,企業中營收規模超過1億元的不超過100家,絕大部分企業系統集成業務營收不超過3000萬元。其中,營收規模超過3億元的企業“大企業”也主要集中于汽車焊接集成領域。
截止于2018年7月23日,行業調研組織MIR收錄了610家系統集成商,其機器人銷售業績,能夠占到整體中國機器人行業的70%以上。MIR還會繼續收錄系統集成商,計劃到年底將超過1000家。
近期,MIR對這610家集成商的企業性質、上市狀態、地區分布、品牌授權、行業覆蓋、工業覆蓋等方面進行了分析,分析結果如下:
國內機器人系統集成商地區分布
企業集中于長三角、珠三角地區。
分析發現,610家工業機器人系統集成商區域集中度較高,長三角(上海、江蘇、浙江)、珠三角(廣東)為兩大集聚區域,兩地區企業合計占比近七成。其中34.3%集中在廣東省,31.8%集中在江浙滬地區,10.7%集中在京津冀地區,極度吻合工業機器人區域分布特點。
究其原因:汽車、電子行業生產主要分布在華東華南地區,上海、武漢、長春、廣州是中國汽車生產基地最為密集的4大地區,同時,上海、廣州也是電子行業的發達地區,在以上地區,2017年工業機器人的銷量占比最大,達50%以上。
國內機器人系統集成商企業性質分布
610份樣本中,本土系統集成商數量占據中國機器人企業數量90%以上的比例,但本土系統集成商普遍規模較小,絕大多數廠商的年產值并不高。本土企業優秀代表基本集中在汽車整車及汽車零部件領域,例如四川成焊寶瑪、天津福臻、博眾精工、安徽巨一等。
國內機器人系統集成商授權狀態
MIR收錄的610份樣本中,有369家是授權SI,占60%;241家是非授權SI,占40%。絕大多數的中小型SI都是非授權SI,品牌選擇主要參考終端客戶的選擇。授權SI中,有359家是機器人外資企業的授權SI ,有32家是機器人本土企業的授權SI(有些授權SI授權外資品牌,同時也授權本土品牌)。
可以看出,在中國市場,外資品牌主要的銷售渠道是系統集成商,因為外資工業機器人主要應用在對集成要求高的汽車和電子行業,而依靠系統集成商能夠更快速地拓展市場。
國產品牌的機器人應用行業比較分散,塑料橡膠、食品飲料、電子制造等都是國產機器人主要應用行業,并以搬運、碼垛等精度和負載要求較低的應用方式為主,在此情況下,終端用戶的集成需求沒有那么高,而在利潤相對較少的情況下,國產機器人廠商也傾向直銷,以獲取更多的利潤。因此國產品牌工業機器人廠商多以直銷為主。
國內機器人系統集成商上市狀態
據統計顯示,目前國內機器人系統集成上市公司大致有60多家,涉及機器人系統集成的上市公司包括沈陽新松、博實股份、天奇股份、廣州數控、埃斯頓等。新三板公司有北人機器人、巨能機器人、銘賽科技等等。
國內機器人系統集成商行業覆蓋情況
MIR對610家系統集成商中的541家進行了行業覆蓋分析,其中464家覆蓋汽車行業,占比85.8%;204家覆蓋電子行業,占比37.7%;122家覆蓋家電行業,占比26.6%;112家覆蓋食品飲料行業,占比20.7%。
究其原因:還是因為工業機器人廣泛應用于汽車、電子、家電、食品、金屬加工等行業。近幾年,中國工業機器人系統集成商市場主要受汽車行業發展帶動,汽車行業系統集成商數量較多。目前中國汽車行業趨于飽和,但其子行業電動汽車行業的發展為中國工業機器人系統集成商市場提供了新的增長動力。與此同時,隨著工業機器人向著更深更遠的方向發展以及智能化水平的提高,工業機器人系統集成商的行業覆蓋從傳統制造業推廣到了其他制造業,像是半導體、新能源(主要是鋰電池行業)、醫療、陶瓷衛浴等行業。以鋰電池為例,鋰電池生產流程里的入殼、化成、分容、封裝、電芯清洗、外觀檢測、電性檢測、模組組裝、裝配壓合、模組焊接、成品檢測等多個環節需要用到大量工業機器人,而且目前鋰電池行業處于快速發展階段,多個鋰電池項目都處于上馬及升級改造階段。鋰電池行業對工業機器人的大量需求催生了對工業機器人系統集成商的需求,預計未來幾年鋰電池行業工業機器人系統集成商數量將繼續保持快速增長。
國內機器人系統集成商工藝覆蓋情況
工業機器人應用常見于四大領域,分別是搬運、加工、檢查及組裝。各領域又分為多個工藝,具體工藝細分見下表:
MIR對610家系統集成商中的541家進行了工藝覆蓋分析。分析表明,不同行業系統集成商工藝的覆蓋程度不同,例如在汽車整車及零部件生產中,有大量加工機上下料、設備間搬送、點焊、弧焊、拋光、涂裝、組裝等工序,目前大多都是由工業機器人完成,因此汽車行業機器人系統集成商業務基本都會覆蓋這些工藝段;而電子機器人系統集成商,主要集中在加工機上下料、設備間搬送、點焊、弧焊、組裝等工序。
MIR列舉了幾個重點行業系統集成商的工藝覆蓋情況,供大家參考。
△數據解讀:以汽車行業為例,MIR分析了464家涉及汽車行業的工業機器人系統集成商。分析結果表明有251家業務覆蓋加工機上下料工藝、47家覆蓋揀選工藝、108家覆蓋碼垛工藝、214家覆蓋設備間搬送工藝、40家覆蓋托板裝載工藝、31家覆蓋移載?排列裝箱工藝。
雖然工業機器人應用市場需求量逐年遞增,但國產機器人需求量不增反降,國外品牌采購成本高,集成商資金壓力較大。
汽車市場需求量穩居第一,對機器人精度穩定性更高,機器人本體市場潛移默化的也影響著集成商的競爭市場。
集成商數量瘋狂式的增長,但成氣候的少之又少,可預見在不久的將來,很多小規模的集成商將被市場無情的淘汰或者被“大魚”吞并。
-
工業機器人
+關注
關注
91文章
3353瀏覽量
92569 -
減速器
+關注
關注
7文章
390瀏覽量
23220
原文標題:【機器人】工業機器人控制技術、精密減速器技術分析
文章出處:【微信號:jingzhenglizixun,微信公眾號:機器人博覽】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
淺析RV減速器和諧波減速器的區別






 工商網監
工商網監
評論