 基于ACP的智能車輛網聯管理與控制
基于ACP的智能車輛網聯管理與控制
智能交通系統(Intelligent transportation systems, ITS)[1]是將先進的人工智能技術、信息處理技術、數據通訊傳輸技術、電子傳感技術、電子控制技術及計算機處理技術等有效地集成運用于整個地面交通管理系統而建立的一種全方位、全天候、實時、準確、高效的綜合交通運輸管理系統.ITS能有效地利用現有交通設施、減少交通負荷和環境污染、保證交通安全、提高運輸效率、促進社會經濟發展、提高人民生活質量,并因推動社會信息化及新產業形成而受到各國的重視.
車聯網是物聯網技術在智能交通中的應用[2].近年來,隨著車輛智能化與無人駕駛技術的發展,車輛對于周圍環境的感知能力、車載終端的計算與規劃能力顯著增強,信息在車與車、車與人、車與路之間共享和傳輸的實現,為智能交通的全面管理與控制提供了新的科學思路與技術手段[3].然而,車聯網系統涉及到動態交通場景中人-車-路的信息傳輸、交互、重組、后臺數據分析、決策支持等多個過程.一方面,駕駛員心理與行為的高突變性、不確定性、動態性為人與車、車與車、車與外部環境的交互引入了新的復雜因素;另一方面,車內網、車際網與車載移動網絡的合成不可避免地引入了社會信號[4],使車聯網成為一個典型的社會物理信息系統(Cyber-physical-social systems, CPSS)[5-6].不同于傳統的物理信息系統(Cyber-physical systems, CPS), CPSS將人及其心理和組織的因素納入系統之中,極大地提高了系統的建模復雜性,成為約束車聯網智能化水平的一大瓶頸.
復雜系統管理與控制國家重點實驗室王飛躍研究員2004年提出的“平行系統方法與復雜系統的管理和控制”[7]一文為應對復雜系統難以建模與實驗不足等問題提出了新的研究思路:集人工系統(Artificial systems, A)、計算實驗(Computational experiments, C)、平行執行(Parallel execution, P)為一體的ACP平行智能方法體系.它通過數據驅動的描述智能、實驗驅動的預測智能、虛實互動反饋的引導智能,為不定、多樣和復雜問題(Uncertainty, diversity, complexity, UDC)提供靈捷、聚焦和收斂(Agility, focus, convergence, AFC)的解決方案,為解決復雜CPSS系統的建模、計算、評估與管理提供有效途徑.近年來,基于ACP的平行智能方法不斷在實踐中得以完善,逐漸發展出了平行視覺[8]、平行感知[9]、平行數據[10]、平行情報[11-12]、平行學習[13]的理論與對應方法,在交通[14-17]、物流[18-19]、農業[20]、能源[21]、醫療健康[22-24]、機器人[25]、區塊鏈[26-27]、無人駕駛[28-29]等領域得到了廣泛應用,并取得了顯著的效果.
為此,本文嘗試將平行智能這一本世紀初提出的原創性研究范式引入車聯網領域,以有效解決時變、異質、復雜交通環境下車聯網的建模、規劃與決策、優化管理等問題.本文結構安排如下,首先詳解平行智能的概念、框架、哲學基礎與科學思維;隨后著重介紹了平行智能在平行交通領域的探索與實踐;在此基礎上,將平行智能的架構與體系與車聯網深度融合,提出平行車聯網的概念體系,闡述基于ACP方法的平行車聯網的框架、功能與流程;最后對本文工作進行總結,展望未來趨勢.
1 平行智能:框架、哲學基礎、科學思維
平行智能是在本世紀初提出的原創性研究范式.它主要面向由泛在的移動智能設備以及社會信號促成的“人在環路”、兼具高度社會和工程復雜性的CPSS系統,通過數據驅動的描述智能、實驗驅動的預測智能、虛實互動反饋的引導智能,為不定、多樣和復雜問題提供靈捷、聚焦和收斂的解決方案[30-31].
ACP方法是實現平行智能的有效途徑[32-33].通過構建軟件定義的人工系統(A),對系統中的每個元素構建人工對象、人工流程、人工關系,開放了復雜系統的組合、編程、學習與演化能力,使得系統的資源甚至結構重構成為可能;以實際系統運行產生的數據為人工系統的輸入,以游戲或博弈的方式進行計算實驗(C),從“小數據”生成“大數據”,而后對計算實驗的運行結果進行評估,得到特定場景下的最優或最可行方案;平行執行(P)則將計算實驗獲取的方案“投入”人工系統中,并通過預訓練以及模型調參的方式引導實際逼近人工,讓“大數據”聚焦,成為針對具體問題的“小知識”,最終通過人工與實際系統的虛實交互與閉環反饋實現決策尋優與平行調諧. ACP方法體系如圖1所示.

圖1基于ACP的平行智能架構體系
1.1 CPSS的哲學基礎:波普爾的三個世界
CPSS的科學哲學起源可追溯到波普爾在其1972年出版的《客觀知識》一書中提出的“三個世界”的理論[34],即世界由三部分組成:第1部分的物理世界、第2部分的心理世界和第3部分的人工世界.對此,中科院自動化研究所王飛躍研究員認為[35],經過幾千年的發展,農業和工業社會已全面地開發了人類的物理自然世界和精神心理世界,保障了人類的生存和發展;物聯網、大數據、云計算等概念的興起以及人工智能、機器人、無人駕駛等技術的再次風靡,預示人工世界將成為人類現階段開發的重點,其核心任務就是深度開發數據和智力資源.為此,我們必須認識到,以人為本、面向物理世界和網絡空間融合的CPSS而非傳統的信息物理系統(CPS)將成為未來社會的基礎設施.
CPSS區別于CPS的核心要素可用“建模鴻溝”[36]來表示.在CPSS中,由于“人”與機器、流程、系統的深度耦合,并且人的行為具有動態性、實時性、自組織性、突變性、高度復雜性、虛實交互性等特點,系統表現出更強的UDC特征.簡言之,人類行為的加入導致了系統復雜程度的增加,使其逐漸地從簡單的物理系統向大型的信息系統發展,再向包含社會因素的復雜社會系統過渡,所涉及的關鍵信息也從物理信號,到網絡信號,再到社會信號演變;針對系統的行為的建模方法也從解析式的數學模型到仿真模型,再到描述型的人工模型升級;實際行為與模型行為之間的差別也越來越大,以至形成“建模鴻溝”的客觀現象,如圖2所示.隨著復雜性的提高,目標與現實的差距“鴻溝”越來越難以跨越,因此,要求我們從利用可以控制系統行為的“牛頓定律”進行建模,轉向通過能夠影響系統行為的“默頓定律”進行描述,實現從傳統的“牛頓系統”思維到“默頓系統”思維的轉變.
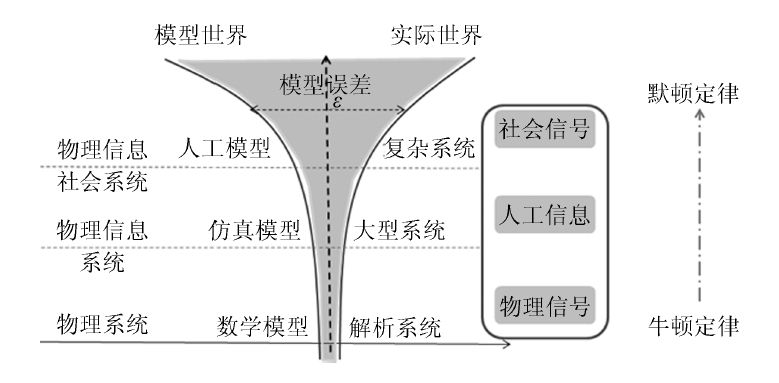
圖2復雜系統的建模鴻溝
1.2 平行智能的科學思維:從牛頓到默頓
我們稱能夠由“牛頓定律”控制的系統為“牛頓系統”[35]. “牛頓定律”泛指包括經典牛頓定律在內的可通過解析的方式精確地描述系統行為的科學定律和公式.現代工程控制理論與方法,便主要是應用于此類“牛頓系統”,即:給定當前系統狀態與控制的條件,理論上系統下一步的狀態可通過求解方程準確獲得,從而精確預測系統的行為.牛頓系統建模的核心是尋求控制系統行為的“牛頓定律”,據此直接設計相應的控制方法,實現期望的目標.
對應的,系統行為能夠被“默頓定律”影響或引導的系統我們稱為“默頓系統”. “默頓定律”泛指以社會學家默頓命名的各種能夠引導系統行為的“自我實現預言”[36-37].與牛頓系統不同的是,即使給定其當前狀態與控制條件,理論上系統下一步的狀態也無法通過求解而準確地獲得,系統的行為也難以被精確地預測,只可能被“人為”的假設或可能性描述.默頓系統建模的核心變為根據目標去設計能夠有效地影響或指導系統行為的“默頓定律”,在此基礎上建立圍繞目標實現這一任務的人工系統,從而直接或間接地影響“自由意志”,改變行為模式,進而通過實際系統與人工系統的平行互動,促使實際系統運行在期望的目標之下.
對于牛頓系統, “行為建模”與“目標建模”是一致的:只要系統本身可控,可以通過對“行為模型”的分析達到對其控制的目的,無需單獨對目標進行建模.與牛頓系統不同,默頓系統的“行為建模”與“目標建模”是獨立且不一致的,必須單獨對目標進行描述和建模,以便決定如何圍繞預定目標對系統的情景和行為進行引導、分析、預判、歸類、實驗、評估等.
CPSS是一類典型的默頓系統[38-39],面向CPSS的平行智能體系架構如圖3所示.由于系統本身帶有社會空間引入的、包含人類“自由意志”的不確定性,系統“行為模型”的準確性和有效性高度依賴于系統參與人員之行為的可控性和確定性,導致本質上無法對其“行為模型”進行直接控制,只能間接影響.集人工社會、計算實驗、平行執行為一體的ACP平行智能方法為解決此類復雜系統問題提供了有效手段:以真實數據為驅動,通過自底向上的多智能體方法對復雜系統描述、建模,構造與實際系統平行演化的人工系統;以人工系統為“社會實驗室”,對復雜場景計算、評估、訓練,借助人工系統的計算實驗使復雜問題參數化、簡單化、確定化;最終人工系統與實際系統密切相連、虛實互動,形成實時自適應調節的平行系統.最終實現數據驅動的描述智能、實驗驅動的預測智能、虛實互動反饋的引導智能;為不定、多樣和復雜的默頓系統問題提供靈捷、聚焦和收斂的解決方案.
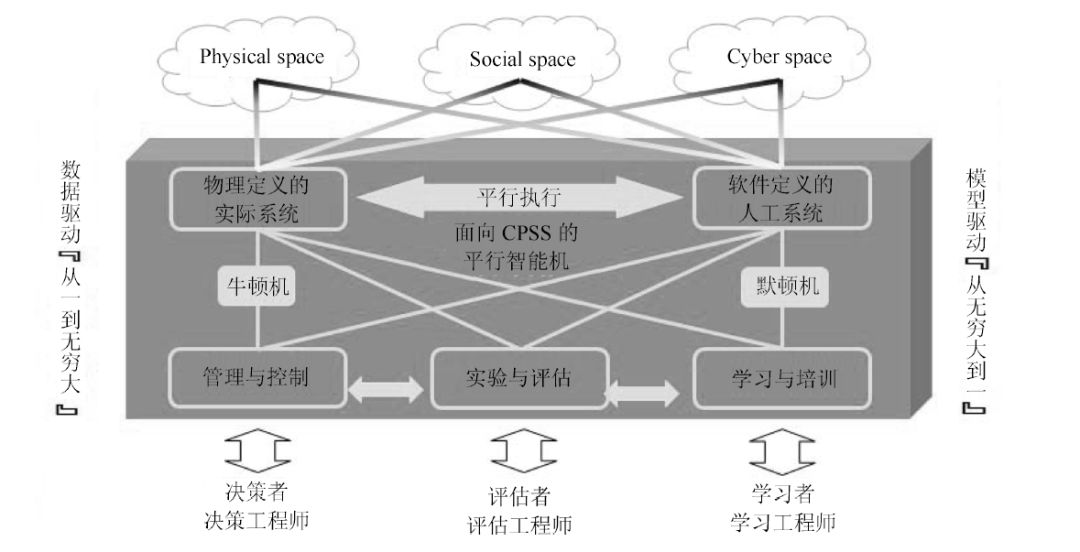
圖3面向CPSS的平行智能體系架構
2 平行交通:基于ACP的智能交通管理與控制
ACP平行智能方法最早被應用于智能交通領域,近年來在城市區域交通、軌道交通、物流交通等諸多領域也得到了廣泛應用并取得了良好的社會與經濟效應[14-17,30-32].本質上,交通系統中的駕駛員與車、路以及交通信息網是一個密不可分的整體,必須使用CPSS復雜系統的觀念來看待.本節首先介紹平行交通的已有工作基礎,在此基礎上,將平行智能方法引入車聯網的研究中,由此提出平行車聯網的體系架構.
交通系統是一個典型的CPSS[40]:作為一個開放的復雜系統,交通系統包含了人與社會動態變化性和不可預測性,且物理過程與社會過程交叉參半,許多現象均是涌現而來,兼具典型復雜系統之不確定性、動態時變性及互作用性等眾多特征[41].一直以來,交通系統的管理與控制主要面臨兩大問題:一是傳統交通的數據存在很高的壁壘,交通數據難以大規模體系化獲取;二是傳統方法幾乎都是使用已存在的交通數據進行推理、決策,由結果去探索原因,無法全面復盤問題本質,難以從根本上解決交通問題.
基于ACP方法的平行交通系統使用人工交通系統(Artificial transportation systems, ATS)建模構造交通的“社會實驗室”;借助計算實驗C對各種各樣的交通行為和現象進行“試驗”,作為實際交通情況的參考基礎,并探索系統中的因果邏輯及異常情況;通過平行執行P對計算結果加入分析和利用,以實現“虛實”互動的平行管理與控制,為解決上述兩個提問提供了有效方法.
在平行交通理論體系的基礎上,中國科學院自動化研究所團隊在2010年自主研發了平行交通系統PtMS[15],系統組成如圖4所示. PtMS由實際交通系統和人工交通系統共同組成,包括基于代理進行平行管理與控制的aDAPTS,進行交通試驗分析的DynaCAS,針對學習與培訓的OTSt;系統具體涵蓋交通視頻采集與分析系統RoadScope,網絡化交通信號控制器GreenPass,人工交通系統TransWorld,云計算平臺,交通信息發布平臺五大模塊.平行交通原型系統的設計、開發與研究利用多學科、跨領域、綜合性的復雜系統方法研究交通系統,開辟了智能交通研究的新思路,并在江蘇太倉[15]、廣州亞運會[42]以及山東青島[43]等地得到了應用實踐,取得了良好的運行效果.
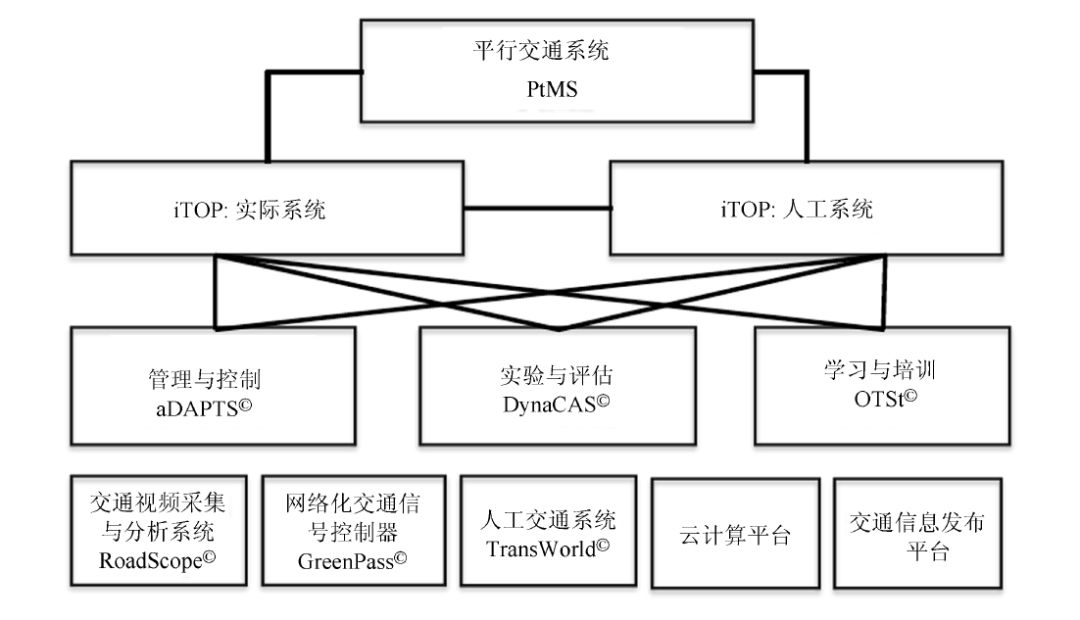
圖4平行交通系統PtMS組成
近年來,隨著計算機、數據通信、智能傳感等技術的發展以及移動智能終端的泛在使用,大數據、云計算、物聯網、社會網絡以及人工智能等技術進一步被集成在交通運輸、服務推薦、車輛管理等整個地面交通管理系統中.這一方面加強了駕駛員、車輛、道路以及交通服務提供商之間的聯系,使得一種全方位發揮作用、移動指揮與管理、多交通信息系統深度融合的“多位一體”綜合交通運輸管理系統[43]正在形成;另一方面,社會網絡以及人工智能技術的發展進一步促進了個人信息終端與車載終端的深度融合,人類行為的復雜性、突變性、高度動態性、自組織性等特征通過車輛在交通系統中被延伸甚至放大.這即要求,智能交通系統不僅需要對人-車對象進行組織與管理,還需要將人-車對象作為一個整體考慮其與路邊單元以開放社會環境的協同.車聯網作為一種協同多人、多車、多路邊單元與開放環境的可計算、可控、可管理、可引導、可信的開放融合網絡系統,為未來綜合交通系統的智能管理與控制提供了新的思路與途徑.
3 平行車聯網:概念、框架、功能與流程
平行車聯網的基本思路是將基于ACP平行智能方法引入車聯網系統,在物理和網絡空間數據的驅動下,結合無線通信、多智能體建模、計算機圖形學、虛擬現實、機器學習、社會網絡分析等技術,借助軟件定義的對象(Software-defined objects, SDO)、軟件定義的關系(Software-defined relationships, SDR)、軟件定義的流程(Software-defined processes, SDP)等,針對物理空間中的車-人(V2P)、車-車(V2V)、車-基礎設施(V2I)等對象及其雙向通信構建與之對偶、互逆、平行的人工過程,而后利用人工系統、計算實驗與平行執行的范式來建立虛實交互、協同演化、閉環反饋的平行車聯網,實現交通系統智能管理、社會信息動態服務和車輛智能控制的一體化網絡.本節首先對已有的車聯網相關工作進行介紹,在此基礎之上提出平行車聯網的概念與基本框架,并闡釋其系統功能與運作流程.
3.1車聯網基本概念與架構
車聯網是物聯網在交通領域中的具體實現,具有明顯的物聯網屬性,是一種典型的復雜網絡系統[2].其體系架構與物聯網有許多共同之處,目前文獻中大多將車聯網分為車載端、通信層、云管層等3層架構:車載端同時負責感知收集信息以及提供應用服務;通信層傳輸信息;云管層依據業務及場景需求進行數據分析、計算與建模,為車載端應用服務提供后臺支撐.層層相連,每一層為其上層提供信息與決策支持,如圖5所示.

圖5車聯網基本架構體系
感知及服務層一方面通過射頻識別RFID (Radio frequency identification)、GPS (Global positioning system)、車載雷達、攝像頭、車載娛樂設施等傳感器采集車輛、道路、環境以及駕駛員信息,另一方面也通過各類車載傳感器為駕駛員提供娛樂、行車安全以及交通環境監測識別等服務,是智能駕駛決策、智能交通管控、車載信息服務等車聯網服務的基礎.通信層利用網絡傳輸與數據通信技術,實現車輛聯網;同時根據網絡負載狀況和接入資源限制,建立穩定、安全、高質量的信息傳送通道.常見通信形式包括:車與人(V2I)、車與車(V2V)、車與路邊基礎設施(V2I)、車與移動基站、車與數據中心的通信.云管層以“車端簡單、云端復雜”的方式,融合物聯網、互聯網、社會網、智聯網的傳輸數據,利用邊緣計算、云計算、社會計算以及普適計算等技術,從全網范圍內對資源需求進行解析、計算并調配,實現對特定場景、任務、服務的精準認知,以達到有效減少交通擁堵、提高出行效率、綠色出行的目的.
很明顯,車聯網是一個典型的“人在環內”的CPSS系統.其中每一個行人、車輛、路側設施、移動基站都可以抽象為車聯網中的節點,通過社會網、互聯網、物聯網等的連接,互動連接構成社群,為車聯網服務提供支持.作為一個特殊的復雜網絡,車聯網系統元素的多樣性、時變性、分布式的結構及參與個體行為的不確定性、復雜性、多樣性,導致其內在的動力學機制極為難以理解.同時,智能駕駛技術所促成的“人車共駕”形態將會是未來較長時間內的一種典型現象,這不僅需要考慮駕駛員行為高突變性、不確定性、動態性等復雜因素以及意圖、習慣難以理解等問題;與此同時,車內網、車際網與車載移動網絡的耦合所引入的眾多社會信號(Social signal)也為復雜交通的管理帶來了新的挑戰.
3.2平行車聯網框架、功能與流程
基于ACP的平行混合智能管理與控制研究方法,本文引入復雜網絡分析的方法對車聯網進行解析,綜合考慮信息、心理、仿真、決策的多元融合,以可計算、可實現、可比較的方式對復雜車聯網系統不同層次的結構和功能特性進行解析,為研究復雜系統的控制與管理提供了新思路及方法.它以CPSS復雜系統為對象,將理論研究、實驗方法和計算技術三種科學手段相結合,提高了對復雜系統要素相互作用的動態演化規律的認識分析能力,增強了復雜系統對象應對各種變化和非正常狀態的管控能力,為復雜系統的管理與控制提供了一個有效的創新技術手段.
融合人工車聯網、計算實驗、平行執行三大部分的基于社會物理信息系統(CPSS)的平行車聯網框架如圖6所示.
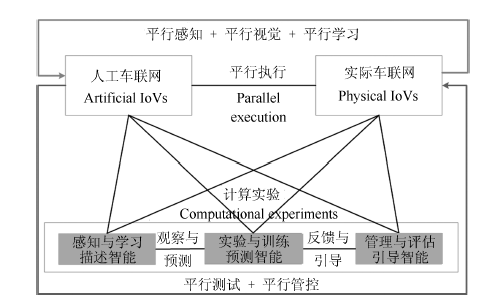
圖6平行車聯網基本框架
本文提出的平行車聯網架構是ACP方法在車聯網領域的推廣,目標是理解車聯網不同層次的結構和功能特性以及內在動力學特性,為混合交通形態下的系統管理提供科學的解決方案.總體上,平行車聯網的ACP由“三步曲”組成.
3.2.1 第一步:人工車聯網, “生長型”系統模型構建與培育
人工車聯網本質是利用人工社會[44]的理論與方法,借助知識表示(Knowledge representation)與知識工程(Knowledge engineering)等手段,針對車聯網包含的各類元素及問題,構建可計算、可重構、可編程的軟件定義的對象(Software-defined objects, SDO)、軟件定義的流程(Software-defined processes, SDP)、軟件定義的場景(Software-defined scenes, SDS),進而通過對象的流程組合等方式搭建、培育“軟件定義的車聯網”,通過對成千上萬的交通場景進行集成,使之成為智能交通“計算實驗室”,進行車聯網復雜問題和決策的計算實驗,一個人工車聯網系統至少包括如圖7所示部分.

圖7人工車聯網子系統組成
采用自底向上的多智能體方法對系統建模,系統中至少有八類智能體對象:人工人、人工車、人工道路、人工路邊單元、人工基站、人工建筑;每類智能體具有簡單的計算與交互能力.同時將天氣和時間因素分別表示為一類特殊智能體,考慮時間與光照、雨、雪、風、霧等天氣情況的組合情況,通過定義智能體之間的交互規則、組織規則與協同行為規則,構建適用于不同真實交通場景及其規范下的人工車聯網子系統,如圖7所示.
已有一些工作通過構建數字化的虛擬人工車輛、人工人口、人工場景等對復雜交通系統的動力學機制進行分析與實驗.王飛躍等早在2003年[45]即提出在智能交通系統中嵌入數字汽車/公路技術,通過向司機提醒潛在駕駛威脅以提高行駛安全,引導安全駕駛行為;隨后在2004年[46]提出了人工交通系統(Artificial transportation systems, ATS)的基本思想與框架體系以及針對復雜交通系統管理與控制的ACP方法[33].朱鳳華等[47]將整個交通系統看作是一個時序通信系統,采用Petri網的方法對ATS中的交互與流程進行建模,以模擬復雜交通系統中的交互行為,為物理交通系統的管控提供科學計算的策略支持.繆青海等設計了一種基于對等計算的ATS[48],借助JXTA體系構架,利用P2P通訊機制構建ATS,并通過仿真實例驗證了該方法的可行性,為數字化智能交通計算實驗室的構建提供了方法基礎. Li等對ATS的生長模型進行了探索,引入多智能體建模方法,設計了一種基于規則迭代演化的ATS[49]. Qu等[50]提出智能交通空間的概念,明確了交通系統的CPSS特性,并強調需要全面考慮行人、車輛、路邊單元、移動基站、衛星等交通因素的交互,構建與真實物理空間相對應的虛擬智能交通空間,進而借助虛擬空間中的策略計算、試驗與評估,發現適用于物理空間交通系統的管控策略. Miao等[51]設計了一種面向Agent的模塊化分布式仿真平臺,以進行人工交通系統的建模和計算.通過將人工人口設計為游戲中的角色,利用Delta3D游戲引擎和Delta3D的動態角色層機制構建3D仿真環境以及管理所有移動角色(包括車輛、行人等). Sewall等在文獻[52]中基于離散時空數據來重建和可視化連續交通流,使用戶能夠在虛擬世界中觀看虛擬化交通事件.該方法能夠重建交通流,實現虛擬城市的沉浸式可視化.這些工作雖然不是直接圍繞車聯網研究展開,但對人工車聯網的構建頗具啟發意義.
相對于實際車聯網系統,人工車聯網中的車輛行為的產生、交互和演化過程是完備的,它一方面極大地彌補了實際車聯網數據(特別是極端環境數據與異常情景數據)的不足;另一方面借助統計機器學習、數據挖掘、深度學習等方法對實際車聯網數據的參數學習確定人工車聯網系統的初始狀態參數,同時結合規則學習方法自動提取智能體的行為規則,進而利用自底向上的多智能體方法對人工車聯網中的對象及其之間的相互作用進行建模.這樣利用大型計算機和多智能體技術“培育生長”起來的人工車聯網系統,能夠模擬并“實播”實際交通系統的各種靜態和動態特征,例如通過駕駛員Agent與車輛Agent的交互,來模擬學習駕駛員的行為特征;通過車輛Agent與路段Agent的交互,實現交通環境感知等等.這種通過大型人工場景的設計來“形象”且“參數化”地解釋“源起于微觀的復雜宏觀現象”,可以更好地解釋復雜車聯網系統不同層次的結構、功能及其動力學特性,如圖8所示.

圖8基于多智能體建模的人-車-路互動示意圖
3.2.2第二步:計算實驗,智能車輛網聯管理與控制策略的試驗與評估
計算實驗的主要目的是借助人工車聯網這個數字化的“計算實驗室”,設計各類智能體的數量組合策略及時序互動規則,生成各類復雜交通場景,以計算的手段讓車輛通過做實驗的方式在其中運行、學習,并對其學習到的“經驗知識”的適用情況進行逆向分析與評估,使人工車輛在虛擬交通實驗室的人工場景中“跑”出真正適用于不同真實交通場景的駕駛策略.圖9闡釋了“計算實驗室”中的實驗設計方式.

圖9“計算實驗室”中實驗設計示意
該環節的主要步驟包括:借助數據挖掘、機器學習與統計分析等技術,對運行于物理世界中的車聯網進行特征與規則提取,構建真實車聯網數據支持中心;隨后利用提取的人-車、車-車、車-路邊單元的運營及交互規則對人工車聯網及其場景進行構建,首先實現對真實車聯網運行情況的模擬;在此基礎之上,可圍繞特定的場景與目標進行實驗設計,從而對特定的管理與控制策略進行測試與評估,若某一策略滿足預定義的目標,則可投放于物理車聯網中,引導其運營.其實驗架構如圖10所示.通過構建這樣一種基于復雜自適應系統的動態網絡分配方法來設計、執行、評估并驗證車聯網計算實驗,來學習已有的以及預測可能會出現的交通模式,可以在棘手的交通模式出現之前,通過交通信息的分發與社會引導,進行有效預防.
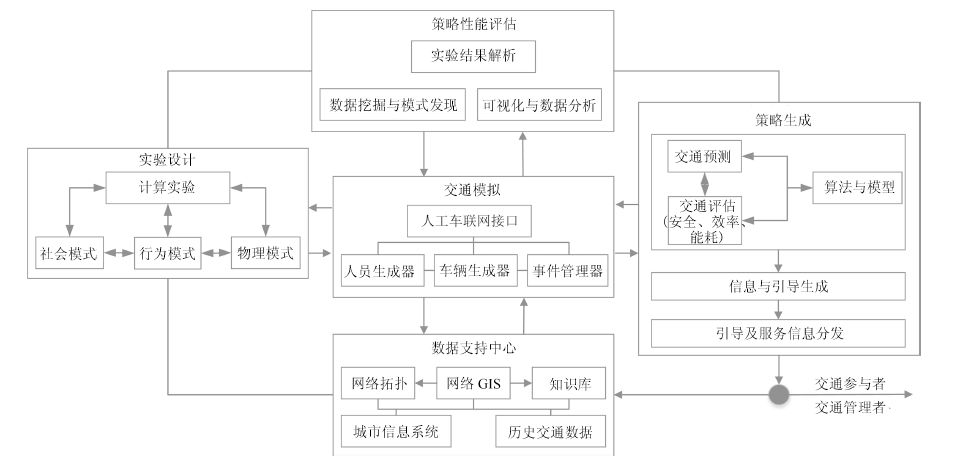
圖10基于復雜自適應系統的動態網絡分配方法的計算實驗
在圖10所示的計算實驗體系中,主要有兩種操作模式:學習與訓練、實驗與評估.目前已有許多工作圍繞智能駕駛的虛擬學習、訓練、測試、評估等工作展開,通過使車輛在集成了大量人工場景的虛擬交通環境中“駕駛”,在車輛上路前賦予其感知復雜環境并認知復雜場景的能力,為平行車聯網的計算實驗工作提供了許多可借鑒的方法.早在2003年,王飛躍等[53]即提出“數字試車場(Digital-vehicle proving ground, DVPG)”的概念,指出DVPG能夠以主動交互或被動接受的方式產生測試任務,并至少滿足兩種類型的服務:標準測試以及特定測試,對無人駕駛車輛進行訓練與評估.清華大學李力等于2016年6月發表于IEEE Transactions on Intelligent Vehicles上的文章[54]通過集成基于場景的測試(Scenario-based tests)與基于功能的測試(Functionality-based tests)方法,提出了一種虛實一體的智能測試新框架;隨后在此基礎上發展出一種“平行學習”[55]新手段,通過使用狀態遷移來刻畫系統變化,使車輛從虛擬交通場景中學習獲取駕駛經驗,甚至識別特定的“交通/駕駛模式”,一旦感知到某些“局部特征”,即可預測整體的交通情況或駕駛狀態,從而預調整自身的駕駛決策與路徑規劃. Alphabet旗下谷歌無人駕駛子公司Waymo的Carcraft與Carcastle項目,通過構建虛擬城市與虛擬空間為智能車輛提供駕駛學習環境,使得車輛“不是‘像’在外面的真實世界中進行駕駛決策,而就‘是’在外面的真實世界中決策”[56].中國科學院自動化研究所王坤峰等[57]近來也提出一種使用“虛擬圖像”來訓練并測試檢測物體的方法,一方面彌補了真實數據集的不足,另一方面為檢測視覺識別算法提供了新的數據,可幫助算法更好地學習與演化,與Waymo的方法異曲同工;該團隊還建立了開源的平行視覺研究平臺(http://openpv.cn),以促進平行視覺的研究[58].來自卡內基梅隆大學、Petuum公司的Yang等學者則提出了一種“現實域到虛擬域統一的無監督方法”[59],使用條件生成對抗網絡來將真實域中的駕駛圖像變換到虛擬領域中的規范表示,并從中預測車輛控制命令以提高車輛指令預測任務的性能.
計算實驗是平行智能非常重要的一個環節.在復雜實際車聯網中,我們難以獲得車聯網中各對象狀態、組織行為、演化過程的完備數據,但人工車聯網能夠模擬整個車聯網系統,在“學習與訓練”模式下,自動習得或生成精確的標注信息,使得原本因需要付出巨大經濟代價或系統太過復雜而無法進行的實驗通過計算的手段得以順利進行.同時,通過計算實驗,我們就能面向具體應用,如特定交通場景、特定駕駛功能、特定交通任務,從全局優化的角度對人工車聯網進行專項訓練;同時在“實驗與評估”操作模式下,利用人工車聯網的運行結果,全面評價其在復雜情況下的表現性能以及危險程度.
3.2.3第三步:平行執行,車聯網的智能引導管理與控制
平行車聯網綜合考慮車內網、車際網、車路網以及社會網的平行,如圖11所示.通過構建與物理空間車聯網相對應的虛擬人工車聯網,借助計算實驗的手段,即可設計面向復雜交通系統的可重復、可配置、可計算、可引導的車聯網管理與控制實驗,有效評測、預估并引導實際車聯網運營狀態.此時,計算實驗的結果不再僅僅是對實際運行情況的“仿真”,而是成為了系統運行狀態的一種可能結果[60].一方面,實際車聯網向平行車聯網提供真實數據信息,提供建立、調整及優化人工車聯網模型的狀態參數;計算實驗利用輸入的真實數據進行模型訓練,生成大量“人工數據”,在真實“小數據”與人工“大數據”組成的“混合海量數據”中進行大量的學習,提高并優化系統的場景學習與情景認知能力;另一方面,通過虛擬現實平行執行的方式,人工車聯網中的計算實驗結果將被反饋給實際車聯網,進行實時且在線的借鑒、預估與引導,循環往復,協同優化.

圖11平行車聯網架構
平行車輛作為CPSS空間中聯通基礎設施網絡與人類社會網絡的人車協同個體,是解決車聯網中人-車協同以及單車與車群協同問題的關鍵[61-62].人車協同單元通過車內的人-車交互手段,實現協同感知、規劃與決策;通過車際網提供的車-環境直接交互和車載移動互聯網提供的間接交互,實現車聯網環境元素之間的信息感知控制與反饋;通過社會網提供的生活服務交互,保障社會需求與關系在車聯網中的延伸與實現.同時,人工車輛在虛擬交通空間中可以不受物理空間位置的限制、能源的限制、數據通信瓶頸的約束,與其他人工車輛進行交互,以眾包的方式完成路網環境數據采集、協同路徑規劃、復雜場景感知與情景認知等任務.
在平行車聯網中,虛擬車輛通過平行感知、平行學習、平行駕駛、平行規劃與平行測試的方法保障人工車聯網與實際車聯網的實時信息交互、策略反饋及雙向優化,提升智能網聯汽車在感知、決策與規劃和控制等關鍵領域的性能表現,實現對不同層次需求、不同服務內涵的整體網絡資源及交通資源的優化管理與配置,從而更好地滿足不斷提高的車聯網系統的控制與管理需求,為涵蓋不同自動化層級的智能網聯汽車系統和未來智能交通提供一套智能融合解決方案及框架[63-64].
近年來出現的AlphaGo可被視為平行學習、平行評估與平行決策的最佳示例. AlphaGo以人類棋手真實歷史棋局的“小數據”為輸入,通過“左右互搏”式的計算實驗來進行自博弈、自適應和自演化,生成大量的由真實棋局和虛擬棋局組成的“混合大數據”;再通過算法對棋盤局勢(潛在結果)進行評估,得出落子的價值及其行為策略的效率等“小知識”,并通過與人類棋手的不斷對弈實現平行進化.人工車輛與實際車輛也遵循這一過程(如圖12所示),通過虛實互動、平行執行,為實現高效、在線、實時的雙向反饋機制以及對實際車聯網的監控預警與反饋支持提供了保障.
圖12平行車輛的虛實互動、平行執行
4 總結與展望
本文從CPSS的角度對車聯網進行系統化分析,將平行智能理論與ACP方法推廣應用于車聯網領域,提出了一種新型的平行車聯網架構,并對其構建方法進行了深入探討.平行車聯網綜合數據挖掘、機器學習、人工智能、虛擬現實、知識自動化等技術,綜合考慮信息、心理、仿真、決策的多元融合,以可計算、可實現、可比較的方式對復雜車聯網系統不同層次的結構和功能特性進行解析,為未來交通的智能管理與控制提供了新思路及方法.
然而,車聯網是一種涉及到多方個體行為的復雜系統,引導策略最終是否生效與駕駛員、管理員是否完全按方案執行有很大關系.在實際車聯網中,用戶由于主觀或者客觀因素,并非一定會完全按照車聯網的優化方案執行,如何計算并根據社會可接受度(Social acceptance)來靈活調整和分配可用資源、發布引導信息將是平行車輛網需要解決的最具挑戰且重要的問題之一.
現階段,平行駕駛、平行學習與平行測試的研究已經引起了國際同行的高度重視,隨著相關技術的進一步發展,平行車聯網作為一個集成驗證平臺,必將成為未來智能交通系統研究的一個重要方向.結合不斷發展的無人駕駛技術與日益豐富的業務需求,平行車聯網將會有更為廣闊的研究空間與更具潛力的應用前景.
參考文獻
1Lu Hua-Pu, Sun Zhi-Yuan, Qu Wen-Cong. Big data and its applications in urban intelligent transportation system. Journal of Transportation Systems Engineering and Information Technology, 2015, 15(5): 45-52.
(陸化普,孫智源,屈聞聰.大數據及其在城市智能交通系統中的應用綜述.交通運輸系統工程與信息, 2015, 15(5): 45-52. DOI:10.3969/j.issn.1009-6744.2015.05.007)
2 Li Jing-Lin, Yuan Quan, Yang Fang-Chun. Crowd sensing and service in internet of vehicles. ZTE Technology Journal, 2015, 21(6): 6-9.
(李靜林,袁泉,楊放春.車聯網群智感知與服務.中興通訊技術, 2015, 21(6): 6-9. DOI:10.3969/j.issn.1009-6868.2015.06.002)
3 Han S S, Wang F Y, Wang Y C, Cao D P, Li L. Parallel vehicles based on the ACP theory: safe trips via self-driving. In: Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (Ⅳ). Los Angeles, CA, USA: IEEE, 2017. 20-25
4 Wang Fei-Yue. A framework for social signal processing and analysis: from social sensing networks to computational dialectical analytics. Scientia Sinica: Informations, 2013, 43(12): 1598-1611.
(王飛躍.社會信號處理與分析的基本框架:從社會傳感網絡到計算辯證解析方法.中國科學:信息科學, 2013, 43(12): 1598-1611.)
5 Wang F Y. The emergence of intelligent enterprises: from CPS to CPSS. IEEE Intelligent Systems, 2010, 25(4): 85-88. DOI:10.1109/MIS.2010.104
6 Zeng J, Yang L T, Lin M, Ning H S, Ma J H. A survey: cyber-physical-social systems and their system-level design methodology. Future Generation Computer Systems. DOI:10.1016/j.future.2016.06.034
7 Wang Fei-Yue. Parallel system methods for management and control of complex systems. Control and Decision, 2004, 19(5): 485-489.
(王飛躍.平行系統方法與復雜系統的管理和控制.控制與決策, 2004, 19(5): 485-489. DOI:10.3321/j.issn:1001-0920.2004.05.002)
8 Wang Kun-Feng, Gou Chao, Wang Fei-Yue. Parallel vision: an ACP-based approach to intelligent vision computing. Acta Automatica Sinica, 2016, 42(10): 1490-1500.
(王坤峰,茍超,王飛躍.平行視覺:基于ACP的智能視覺計算方法.自動化學報, 2016, 42(10): 1490-1500.)
9 Meng Xiang-Bing, Wang Rong, Zhang Mei, Wang Fei-Yue. Parallel perception: an ACP-based approach to visual SLAM. Journal of Command and Control, 2017, 3(4): 350-358.
(孟祥冰,王蓉,張梅,王飛躍.平行感知: ACP理論在視覺SLAM技術中的應用.指揮與控制學報, 2017, 3(4): 350-358. DOI:10.3969/j.issn.2096-0204.2017.04.0350)
10 Liu Xin, Wang Xiao, Zhang Wei-Shan, Wang Jian-Ji, Wang Fei-Yue. Parallel data: from big data to data intelligence. Pattern Recognition and Artificial Intelligence, 2017, 30(8): 673-681.
(劉昕,王曉,張衛山,汪建基,王飛躍.平行數據:從大數據到數據智能.模式識別與人工智能, 2017, 30(8): 673-681.)
11 Wang Fei-Yue. H.S.Tsien's concept for intelligence and parallel intelligence: from LASER to inspiritment. Acta Automatica Sinica, 2015, 41(6): 1053-1061.
(王飛躍.從激光到激活:錢學森的情報理念與平行情報體系.自動化學報, 2015, 41(6): 1053-1061.)
12 Wang Fei-Yue. Intelligence 5.0: parallel intelligence in parallel age. Journal of Information, 2015, 34(6): 563-574.
(王飛躍.情報5.0:平行時代的平行情報體系.情報學報, 2015, 34(6): 563-574. DOI:10.3772/j.issn.1000-0135.2015.006.001)
13 Li Li, Lin Yi-Lun, Cao Dong-Pu, Zheng Nan-Ning, Wang Fei-Yue. Parallel learning: a new framework for machine learning. Acta Automatica Sinica, 2017, 43(1): 1-8.
(李力,林懿倫,曹東璞,鄭南寧,王飛躍.平行學習-機器學習的一個新型理論框架.自動化學報, 2017, 43(1): 1-8. DOI:10.3969/j.issn.1003-8930.2017.01.001)
14 Liu Teng, Yu Hui-Long, Tian Bin, Ai Yun-Feng, Chen Long. Intelligent Command and Control Systems for Intelligent Vehicles: Primary Methods and Systemic Construction. Journal of Command and Control, 2018, 4(1): 22-31.
(劉騰,于會龍,田濱,艾云峰,陳龍.智能車的智能指揮與控制:基本方法與系統結構.指揮與控制學報, 2018, 4(1): 22-31. DOI:10.3969/j.issn.2096-0204.2018.01.0022)
15 Wang F Y. Parallel control and management for intelligent transportation systems: concepts, architectures, and applications. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(3): 630-638. DOI:10.1109/TITS.2010.2060218
16 Lv Yi-Sheng, Ou Yan, Tang Shu-Ming, Zhu Feng-Hua, Zhao Hong-Xia. Computational experiments of evaluating road network traffic conditions based on artificial transportation systems. Journal of Jilin University: Engineering and Technology Edition, 2009, 39(S2): 87-90.
(呂宜生,歐彥,湯淑明,朱鳳華,趙紅霞.基于人工交通系統的路網交通運行狀況評估的計算實驗.吉林大學學報(工學版), 2009, 39(S2): 87-90.)
17 Ning Bing, Wang Fei-Yue, Dong Hai-Rong, Li Run-Mei, Wen Ding, Li Li. Parallel systems for urban rail transportation based on ACP approach. Journal of Transportation Systems Engineering and Information Technology, 2010, 10(6): 22-28.
(寧濱,王飛躍,董海榮,李潤梅,文丁,李莉.基于ACP方法的城市軌道交通平行系統體系研究.交通運輸系統工程與信息, 2010, 10(6): 22-28. DOI:10.3969/j.issn.1009-6744.2010.06.003)
18 Wang Fei-Yue, Dai Ru-Wei, Zhang Si-Ying, Chen Guo-Liang, Tang Shu-Ming, Yang Dong-Yuan, et al. A complex system approach for studying sustainable and integrated development of metropolitan transportation, logistics and ecosystems. Complex Systems and Complexity Science, 2004, 1(2): 60-69.
(王飛躍,戴汝為,張嗣瀛,陳國良,湯淑明,楊東援,等.關于城市交通、物流、生態綜合發展的復雜系統研究方法.復雜系統與復雜性科學, 2004, 1(2): 60-69. DOI:10.3969/j.issn.1672-3813.2004.02.009)
19 Shen D Y, Wang X, Wang J, Guan X Y, Yang P H, Xu L. Parallel intermodal road-rail transportation system based on ACP approach. In: Proceedings of the 2017 IEEE International Conference on Systems, Man, and Cybernetics (SMC). Banff, Canada: IEEE, 2017. 444-449 https://www.researchgate.net/publication/321411352_Parallel_intermodal_road-rail_transportation_system_based_on_acp_approach
20 Kang M Z, Wang F Y. From parallel plants to smart plants: intelligent control and management for plant growth. IEEE/CAA Journal of Automatica Sinica, 2017, 4(2): 161-166. DOI:10.1109/JAS.2017.7510487
21 Deng Jian-Ling, Wang Fei-Yue, Chen Yao-Bin, Zhao Xiang-Yang. From industries 4.0 to energy 5.0: concept and framework of intelligent energy systems. Acta Automatica Sinica, 2015, 41(12): 2003-2016.
(鄧建玲,王飛躍,陳耀斌,趙向陽.從工業4.0到能源5.0:智能能源系統的概念、內涵及體系框架.自動化學報, 2015, 41(12): 2003-2016.)
22 Wang F Y, Wong P K. Intelligent systems and technology for integrative and predictive medicine: an ACP approach. ACM Transactions on Intelligent Systems and Technology, 2013, 4(2).
23 Wang Fei-Yue, Zhang Mei, Meng Xiang-Bing, Wang Rong, Wang Xiao, Zhang Zhi-Cheng, et al. Parallel surgery: an ACP-based approach for intelligent operations. Pattern Recognition and Artificial Intelligence, 2017, 30(11): 961-970.
(王飛躍,張梅,孟祥冰,王蓉,王曉,張志成,等.平行手術:基于ACP的智能手術計算方法.模式識別與人工智能, 2017, 30(11): 961-970.)
24 Wang Fei-Yue, Li Chang-Gui, Guo Yuan-Yuan, Wang Jing, Wang Xiao, Qiu Tian-Yu, et al. Parallel gout: an ACP-based system framework for gout diagnosis and treatment. Pattern Recognition and Artificial Intelligence, 2017, 30(12): 1057-1068.
(王飛躍,李長貴,國元元,王靜,王曉,邱天雨,等.平行高特:基于ACP的平行痛風診療系統框架.模式識別與人工智能, 2017, 30(12): 1057-1068.)
25 Bai Tian-Xiang, Wang Shuai, Shen Zhen, Cao Dong-Pu, Zheng Nan-Ning, Wang Fei-Yue. Parallel robotics and parallel unmanned systems: framework, structure, process, platform and applications. Acta Automatica Sinica, 2017, 43(2): 161-175.
(白天翔,王帥,沈震,曹東璞,鄭南寧,王飛躍.平行機器人與平行無人系統:框架、結構、過程、平臺及其應用.自動化學報, 2017, 43(2): 161-175.)
26 Yuan Yong, Wang Fei-Yue. Parallel Blockchain: concept, methods and issues. Acta Automatica Sinica, 2017, 43(10): 1703-1712.
(袁勇,王飛躍.平行區塊鏈:概念、方法與內涵解析.自動化學報, 2017, 43(10): 1703-1712.)
27 Yuan Yong, Wang Fei-Yue. Blockchain: the state of the art and future trends. Acta Automatica Sinica, 2016, 42(4): 481-494.
(袁勇,王飛躍.區塊鏈技術發展現狀與展望.自動化學報, 2016, 42(4): 481-494.)
28 Wang F Y. Scanning the issue and beyond: parallel driving with software vehicular robots for safety and smartness. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(4): 1381-1387. DOI:10.1109/TITS.2014.2342451
29 Wang F Y, Zheng N N, Cao D P, Martinez C M, Li L, Liu T. Parallel driving in CPSS: a unified approach for transport automation and vehicle intelligence. IEEE/CAA Journal of Automatica Sinica, 2017, 4(4): 577-587. DOI:10.1109/JAS.2017.7510598
30 Wang Fei-Yue. Computational theory and method on complex system. China Basic Science, 2004, 6(5): 3-10.
(王飛躍.關于復雜系統研究的計算理論與方法.中國基礎科學, 2004, 6(5): 3-10. DOI:10.3969/j.issn.1009-2412.2004.05.001)
31 Wang Fei-Yue. On the modeling, analysis, control and management of complex systems. Complex Systems and Complexity Science, 2006, 3(2): 26-34.
(王飛躍.關于復雜系統的建模、分析、控制和管理.復雜系統與復雜性科學, 2006, 3(2): 26-34. DOI:10.3969/j.issn.1672-3813.2006.02.004)
32 Wang F Y, Zhang J J, Wang X. Parallel intelligence: toward lifelong and eternal developmental AI and learning in cyber-physical-social spaces. Frontiers of Computer Science, 2018, 1-5.
33 Wang F Y. Toward a paradigm shift in social computing: the ACP approach. IEEE Intelligent Systems, 2007, 22(5): 65-67. DOI:10.1109/MIS.2007.4338496
34 Wang Fei-Yue. From AlphaGo to parallel intelligence: enlightenment and prospect. Science and Technology Review, 2016, 34(7): 72-74.
(王飛躍.從AlphaGo到平行智能:啟示與展望.科技導報, 2016, 34(7): 72-74. DOI:10.3969/j.issn.1009-6108.2016.07.033)
35Wang Fei-Yue. System engineering and management reform: sublimation from Newton to Merton. Management, 2013(10): 12-19.
(王飛躍.系統工程與管理變革:從牛頓到默頓的升華.管理學家, 2013(10): 12-19. DOI:10.3969/j.issn.1674-1722.2013.10.012)
36 Wang F Y, Wang X, Li L X, Li L. Steps toward parallel intelligence. IEEE/CAA Journal of Automatica Sinica, 2016, 3(4): 345-348. DOI:10.1109/JAS.2016.7510067
37 Wang F Y. A big-data perspective on AI: Newton, Merton, and analytics intelligence. IEEE Intelligent Systems, 2012, 27(5): 2-4. DOI:10.1109/MIS.2012.91
38 Wang F Y. Scanning the issue and beyond: Merton's laws and Mertionian systems for ITS. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(6): 2962-2969. DOI:10.1109/TITS.2015.2494998
39 Wang Fei-Yue. Software-defined systems and knowledge automation: a parallel paradigm shift from Newton to Merton. Acta Automatica Sinica, 2015, 41(1): 1-8.
(王飛躍.軟件定義的系統與知識自動化:從牛頓到默頓的平行升華.自動化學報, 2015, 41(1): 1-8. DOI:10.3969/j.issn.1003-8930.2015.01.001)
40 Xiong G, Zhu F H, Liu X W, Dong X S, Huang W L, Chen S H, et al. Cyber-physical-social system in intelligent transportation. IEEE/CAA Journal of Automatica Sinica, 2015, 2(3): 320-333. DOI:10.1109/JAS.2015.7152667
41 Xing Y, Lv C, Chen L, et al. Advances in vision-based lane detection: algorithms, integration, assessment, and perspectives on ACP-based parallel vision. IEEE/CAA Journal of Automatica Sinica, 2018, 5(3): 645-661. DOI:10.1109/JAS.2018.7511063
42 Xiong G, Wang K F, Zhu F H, Cheng C, An X J, Xie Z D. Parallel traffic management for the 2010 Asian Games. IEEE Intelligent Systems, 2010, 25(3): 81-85. DOI:10.1109/MIS.2010.87
43 Wang F Y. Scanning the issue and beyond: five transportations in one: a new direction for ITS from Qingdao. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(5): 2310-2317. DOI:10.1109/TITS.2015.2478319
44 Gilbert N, Conte R. Artificial Societies: The Computer Simulation of Social Life. London: UCL Press, 1995.
45 Wang F Y, Lai G P, Mirchandani P. Deployment of digital vehicle/highway technology for safety enhancement. In: Proceedings of the IEEE Ⅳ2003 Intelligent Vehicles Symposium. Columbus, OH, USA: IEEE, 2003. 204-207
46 Wang Fei-Yue, Tang Shu-Ming. Concepts and frameworks of artificial transportation systems. Complex Systems and Complexity Science, 2004, 1(2): 52-59.
(王飛躍,湯淑明.人工交通系統的基本思想與框架體系.復雜系統與復雜性科學, 2004, 1(2): 52-59. DOI:10.3969/j.issn.1672-3813.2004.02.008)
47 Zhu F H, Wang Z X, Wang F Y, Tang S M. Modeling interactions in artificial transportation systems using petri net. In: Proceedings of the 2006 IEEE Intelligent Transportation Systems Conference. Toronto, Ont., Canada: IEEE, 2006. 1131-1136
48 Miao Qing-Hai, Tang Shu-Ming, Wang Fei-Yue. Design of artificial transportation system based on JXTA. Journal of Transportation Systems Engineering and Information Technology, 2006, 6(6): 83-90.
(繆青海,湯淑明,王飛躍.基于對等計算的人工交通系統設計.交通運輸系統工程與信息, 2006, 6(6): 83-90. DOI:10.3969/j.issn.1009-6744.2006.06.012)
49 Li J Y, Tang S M, Wang X Q, Duan W, Wang F Y. Growing artificial transportation systems: a rule-based iterative design process. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(2): 322-332. DOI:10.1109/TITS.2011.2110646
50 Qu F Z, Wang F Y, Yang L Q. Intelligent transportation spaces: vehicles, traffic, communications, and beyond. IEEE Communications Magazine, 2010, 48(11): 136-142. DOI:10.1109/MCOM.2010.5621980
51 Miao Q H, Zhu F H, Lv Y S, Cheng C J, Chen C, Qiu X G. A game-engine-based platform for modeling and computing artificial transportation systems. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(2): 343-353. DOI:10.1109/TITS.2010.2103400
52 Sewall J, van den Berg J, Lin M, Manocha D. Virtualized traffic: reconstructing traffic flows from discrete spatiotemporal data. IEEE Transactions on Visualization and Computer Graphics, 2011, 17(1): 26-37. DOI:10.1109/TVCG.2010.27
53 Wang F Y, Wang X J, Li L, Mirchandani P. Creating a digital-vehicle proving ground. IEEE Intelligent Systems, 2003, 18(2): 12-15.
54 Li L, Huang W L, Liu Y H, Zheng N N, Wang F Y. Intelligence testing for autonomous vehicles: a new approach. IEEE Transactions on Intelligent Vehicles, 2016, 1(2): 158-166. DOI:10.1109/TIV.2016.2608003
55 Li L, Lin Y L, Zheng N N, Wang F Y. Parallel learning: a perspective and a framework. IEEE/CAA Journal of Automatica Sinica, 2017, 4(3): 389-395. DOI:10.1109/JAS.2017.7510493
56 Waymo's fully self-driving vehicles are here[Online], available: https://medium.com/waymo/with-waymo-in-the-drivers-seat-fully-self-driving-vehicles-can-transform-the-way-we-get-around-75e9622e829a
57 Tian Y L, Li X, Wang K F, Wang F Y. Training and testing object detectors with virtual images. IEEE/CAA Journal of Automatica Sinica, 2018, 5(2): 539-546. DOI:10.1109/JAS.2017.7510841
58 Wang K F, Gou C, Zheng N N, Rehg J M, Wang F Y. Parallel vision for perception and understanding of complex scenes:methods, framework, and perspectives. Artificial Intelligence Review, 2017, 48(3): 299-329. DOI:10.1007/s10462-017-9569-z
59 Yang L N, Liang X D, Xing E. Unsupervised real-to-virtual domain unification for end-to-end highway driving. arXiv: 1801. 03458, 2018.
60 Wang Fei-Yue. Parallel control: a method for data-driven and computational control. Acta Automatica Sinica, 2013, 39(4): 293-302.
(王飛躍.平行控制:數據驅動的計算控制方法.自動化學報, 2013, 39(4): 293-302.)
61 Li Ke-Qiang, Dai Yi-Fan, Li Sheng-Bo, Bian Ming-Yuan. State-of-the-art and technical trends of intelligent and connected vehicles. Journal of Automotive Safety and Energy, 2017, 8(1): 1-14.
(***,戴一凡,李升波,邊明遠.智能網聯汽車(ICV)技術的發展現狀及趨勢.汽車安全與節能學報, 2017, 8(1): 1-14. DOI:10.3969/j.issn.1674-8484.2017.01.001)
62 Xu W, Zhou H, Cheng N, et al. Internet of vehicles in big data era. IEEE/CAA Journal of Automatica Sinica, 2018, 5(1): 19-35. DOI:10.1109/JAS.2017.7510736
63 Han S S, Zhu F H, Wang Y C, Cao D P, Xiong G, Wang F Y. Modified K-best receiver for multi-antenna vehicular networks. In: Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC). Yokohama, Japan: IEEE, 2017. 1-6
64Wang Fei-Yue, Wang Cheng-Hong. On some basic issues in network-based direct control systems. Acta Automatica Sinica, 2002, 28: 171-176.
(王飛躍,王成紅.基于網絡控制的若干基本問題的思考和分析.自動化學報, 2002, 28(S1): 171-176.)
-
車聯網
+關注
關注
76文章
2563瀏覽量
91522 -
ACP
+關注
關注
0文章
5瀏覽量
7825
原文標題:平行車聯網: 基于ACP的智能車輛網聯管理與控制
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
復雜環境下多無人智能車輛協同調控
智慧軍營車輛管理系統
軍營車輛管理:數字化的未來

如何利用RFID射頻識別技術對車輛進行智慧管理

智能網聯是否是自動駕駛落地的必要條件?
20.2-電磁桿在磁軌道的測試 零基礎入門智能車競賽 STM32電磁小車

vivo智能車載正式上線視頻類應用

什么是智能車間和智能工廠 它們有什么區別
樂華工位機MES助力智能車間
加固平板電腦在地鐵車輛智能管理運營上的應用








 工商網監
工商網監
評論