 NASA用電力推進和一大堆螺旋槳重塑機翼
NASA用電力推進和一大堆螺旋槳重塑機翼
我清楚地記得,在2013年12月一個清冷的日子,在公司位于圣克魯斯山的總部,我和來自NASA的研究人員會面,計劃對電動飛機的一種新型螺旋槳裝置進行測試。我們喬比飛機制造公司(Joby Aviation)團隊、NASA的研究人員,以及來自加州另一家小型企業的同行集思廣益,不知不覺產生了一項雄心勃勃的計劃,這是在會面開始前每個人都沒有想到的。
我們放棄了縮尺模型的建造和測試,而是決定建造一個全尺寸機翼——大到足夠帶動一架四座飛機起飛。它將擁有十幾個或更多個(而不是2個或4個)單獨的電機和螺旋槳,沿著機翼前緣一字排開。我們將小型機翼裝在一輛皮卡上進行測試。全尺寸的機翼還需要一些更加精細復雜的東西。這個項目要在1年內完成,預算少到足以讓大多數公司掉頭就跑。但我們決定全力以赴。
我們的新型裝置基于一個古老的概念(被稱為“吹氣式機翼”),利用很多組沿著機翼前緣安裝的發動機和螺旋槳,高速推動機翼上方的空氣。通常情況下,氣流的速度和飛機的移動速度大致相同;這就是為什么飛機需要在起飛前加速。但若利用很多螺旋槳高速推動機翼上方的空氣,機翼的行進速度就會看起來比實際速度更快,能夠提供更大的升力。
這是一個關鍵優勢,因為有了更大的升力,就可以使用更小的機翼,但飛機需要非常長的跑道才能高速起飛和降落。飛行中的情況則不盡相同,飛機在快速飛行時,較小的機翼就可以提供必需的升力。在飛行階段,大機翼是個劣勢,因為阻力作用在整個機翼的面積上,降低了效率。
因此,大機翼還是小機翼?飛機設計師要如何選擇呢?通常對起飛和著陸的考慮占據主導地位,因此飛行器最終還是配備了影響高效巡航的大機翼。大的機翼也意味著飛行器在遇到湍流時,會顛簸得更厲害。
吹氣式機翼為這個難題提供了解決方案。在起飛和降落期間,以較高的速度吹動機翼上方的空氣,這提供了額外的升力且沒有犧牲巡航性能。雖然過去也開發過一些帶有吹氣式機翼的飛行器,但由于使用內燃機推進,因此限制了設計師的設計空間。他們不得不使用數目相對較少的大型螺旋槳,這些螺旋槳不太適合高速推進空氣。
在翼展范圍內分布大量的小型螺旋槳效率會更高,但在大部分航空史進程中,這種配置是不切實際的。
問題在于內燃機的效率和功率系數(功率輸出和重量之比)隨著它們的體積縮小而直線下降。因此使用大量小型內燃機會導致飛行器效率更低,質量更重。
此外,內燃機是相當復雜的怪物。將大量內燃機放在機翼上,將是維護的噩夢。確實,如果在機翼上安裝大量內燃機,那么可以將傳動軸和變速箱構成的系統連接到單臺或者是少量發動機進行驅動,但這也會導致額外的維護問題,并被迫做出各種設計妥協。20世紀60年代法國寶璣飛機制造公司(Breguet Aviation)在其壽命短暫的941型飛機中就使用了吹氣式機翼,這就是一個證明。
當然,電力推進的最新進展已經改變了這種情況。電機的尺寸縮小不會損失過多的效率或功率系數。并且它們極其簡單,通常只有一個活動部件,所以它們幾乎不需要維護。因此,大量使用小型電機并沒有什么不利之處,而且這些小型電機可放置在過去龐大和笨重的內燃機無法安裝的地方,比如飛行器的翼尖附近。
雖然電動機可以由內燃動力發電機驅動,但采用電池供電的飛行器收益更大。實際上,電池-電力推進的效率大約是傳統內燃機傳動系統的3倍。而且噪聲很小,電力的成本遠比航空燃料低,這種雙管齊下的沖擊——加上高效的傳動系統,以及高效的小機翼機身——有望大幅降低運行成本,如果考慮到維護需求的減少,則更具優勢。
那么,為什么不是所有的飛行器都用電池供電呢?當然因為電池還無法勝任這個任務。即使是當今最好的電池,其能量密度仍然很低,相對重量很大,嚴重制約了電動飛行器的發展。并且它們有時容易起火,有些評論員推測,這可能是今年5月匈牙利電動飛機墜毀事故的原因。但毫無疑問,電池技術將與時俱進。因此NASA、喬比飛機制造公司和很多其他公司都忙于探索各種電動飛行器的設計策略。重振吹氣式機翼便是其中之一。
5年前,NASA的工程師開始考慮使用大量電動機創建吹氣式機翼,后來該項目被命名為前緣異步螺旋槳技術(Leading Edge Asynchronous Propeller Technology ,LEAPTech),“異步”指螺旋槳并不總以相同的速度旋轉。
喬比飛機制造公司是一家成立于2009年的初創企業,開發個人電動飛行器,已經和NASA開展了相關合作。當我和喬比飛機制造公司的同事了解到LEAPTech項目時,我們立刻抓住機會,參與其中。參與LEAPTech合作的還有試驗系統航空航天公司(Empirical Systems Aerospace,ESAero),這也是一家小型公司,曾經與NASA合作研究如何應用電動推進改善飛行器性能。
NASA希望通過對機翼和螺旋槳進行實際測試來驗證這個創意設計,一方面是因為相關的氣動效應非常復雜,對它們進行計算流體力學(CFD)仿真可能不完全可靠。另一個問題是,在現實環境中,這種分布式推進系統可能過于復雜,無法可靠地運行。
NASA想要通過測試來驗證電動驅動的前緣螺旋槳和小于正常尺寸的機翼能否產生足夠的升力,使四座飛機以合理速度起飛。通常,這種測試將在風洞中進行。但租用這樣一個風洞超出了NASA對該項目的微薄預算。此外,合適尺寸的風洞要排隊等待很久。
因此我們決定把LEAPTech機翼原型裝在高速駕駛的卡車上,來測試和分析它的起飛和降落性能。這種測試并非沒有先例。最有名的大概是縮尺復合體(Scaled Composites)公司對太空船一號航天飛機尾部的類似測試,工程師開玩笑地把這種方法也稱為CFD——創造性福特駕駛(Creative Ford Driving)的縮寫。多年來,喬比飛機制造公司一直用一輛福特F-150閃電皮卡進行同類測試。
在2013年決定建造并測試全尺寸LEAPTech機翼的重要會議后不久,我們進行了分工。喬比飛機制造公司和NASA合作負責設計和制造機翼、發動機以及螺旋槳,并對用于測試的卡車進行改造。ESAero負責布線,配置所需的儀表和排除測試的故障。
NASA最初設計的特點是在機翼前緣配置10個用于起飛和降落的螺旋槳,還有兩個單獨的螺旋槳安裝在翼尖上,用于起飛后為飛行器提供動力。將螺旋槳放在翼尖上可以抵消翼尖渦流,進而減少阻力。這也是一個老想法了,如果沒有電力推進就很難實現。同前緣螺旋槳的情況一樣,內燃機又大又重,無法放在翼尖上,在機翼上使用傳動軸和齒輪箱來旋轉翼尖處的螺旋槳,會帶來工程上的麻煩。
經過幾個月的分析,我們得到了一個機翼設計方案:在跨度約9米、面積約5平方米的機翼上,沿著翼展分布18個螺旋槳,每個螺旋槳直徑約半米。這18臺電動推進器的功率大約為225千瓦(300馬力)。
雖然這種機翼僅用于地面測試,但我們在設計的時候還是考慮了一項具體的應用:一個基于Tecnam的P2006T四座雙引擎螺旋槳飛行器的實驗性飛行器。我們之所以選擇P2006T是因為它的尺寸合適,也因為它有翼裝式發動機(這意味著用電動機代替它們會很容易),還因為Tecnam的管理層聽說這個項目后非常激動。
我們設想的實驗性飛行器重約1400千克,起飛速度為61節(113公里/小時),巡航速度為174節(322公里/小時)。在飛機起飛以后,只使用翼尖螺旋槳,前緣螺旋槳只在起飛和降落時使用。因此我們這樣設計:在除起降外的其余飛行過程中,前緣螺旋槳的葉片可以折疊到與短艙平齊,類似于某些現代電動滑翔機的折疊螺旋槳。但因為我們的測試僅限于起飛和降落的性能,因此測試機翼將不包括翼尖螺旋槳,也沒有折疊裝置。
這些規格使我們的設計與四座螺旋槳飛機的參數相近,但機翼更小。實際上,我們的機翼尺寸只有傳統飛行器機翼的1/3。理論上它可以為正常速度的著陸和起飛提供足夠的升力。我們的職責是檢驗這種設想與現實是否相符。
為此,我們購買了一輛彼得比爾特卡車——就是經常拖著拖車在高速公路上飛跑的那種卡車。為了最大限度地降低地面的氣動效應,我們在卡車上搭建了支架,將機翼高高地固定在支架上。為了減少振動,我們用4個結實的安全氣囊墊在機翼與卡車的連接處。雖然這種巨型機翼卡車看起來很奇怪,但它正是這項工作所需要的。
━━━━
在設計和建造工作完成后,我們開始進行測試。測試地點在NASA的一流試飛設施——位于加州莫哈維沙漠中愛德華茲空軍基地的尼爾?A?阿姆斯特朗研究中心干涸的湖床上。1974年湯姆?沃爾夫(Tom Wolfe)的《太空英雄》一書以及1983年的同名電影,讓這個場地聞名于世。這也是1947年查克?葉格(Chuck Yeager)首次突破音障的地方,還是航天飛機的初始著陸點。
我們小心翼翼地使用經過整飭的部分湖床,這是愛德華茲飛行測試項目的備用跑道。雖然不會離開地面,但我們依然必須像對待飛行器一樣,對我們的非常規測試平臺采取所有防范措施,以盡量減少對湖床的損壞并避免留下任何碎片,因為這些可能會對以后在這里進行緊急降落的飛行器造成損害。
確認所有的電池和電力電纜就緒,儀表系統可以記錄數據以后,我們的測試開始:以約130公里/小時的速度駕駛卡車,卡車上的機翼以不同的角度傾斜,螺旋槳以不同的速度旋轉。風洞可以提供精準控制的測試條件,而我們不得不基于測試車輛的地面速度和我們在干涸湖泊中放置的幾個氣象站測出的風速來估算空速。為了最大限度地降低誤差和環境變化,我們在風最為平靜的黎明開始測試。另外我們還不得不避開那些其他飛行器需要用跑道進行緊急降落的日子,比如說,如果遇上NASA測試其X-56A無人機和空軍測試洛克希德馬丁F-35閃電II戰斗機,我們就需要等待很長時間。
在沙漠中度過兩個月后,我們收集了足夠的數據對計算機仿真進行全面復核。我們高興地看到預期中的性能提升。實際測試表明,我們對產生升力的預測有點保守。我們的電動吹氣式機翼確實可行!
━━━━
基于這些鼓舞人心的結果,NASA決定用一架新的實驗飛行器進一步探索吹氣式機翼概念。該飛行器與我們在LEAPTech項目中使用的一樣,即Tecnam P2006T。它將被稱為X-57麥克斯韋,是十多年以來NASA的首架試驗飛機。
對于X-57,我們以多種方式進行了改造。舉例來說,X-57將使用一種稍大的機翼。這種改變將為線路安裝提供足夠的內部空間,但更重要的動機是為了改善“懸停”(loiter)性能。雖然機翼增大,飛行給定距離所需的能量會增加,但在給定時間內在空中停留所需的能量是下降的。例如,當飛行器必須在機場上空盤旋等待天氣好轉后降落時,這一點就非常重要。
我們還決定將前緣螺旋槳的數量從18減到12,在簡單與性能之間,這是更好的折中方案。另外,起飛速度稍稍降低至58節(107公里/小時),這更接近同類飛行器的速度。我們為“推進器”設計的兩個翼尖螺旋槳,從機翼后面移到了機翼前面,當飛機機頭上升時,可提供更大的降落離地間隙。
X-57麥克斯韋的建造現在正在進行。Tecnam P2006T原型機將分階段進行改造。可能還有不到1年的時間,該飛機就可進行首次飛行,2個安裝在機翼上的引擎將被2臺電動機取代,無須改造機翼。下一階段將把原來的機翼換成小機翼,為了提高效率,2臺電動發動機向外側移動到翼尖。(在這項改造后,飛機會需要更長的跑道進行起飛和降落。)在最后階段,將沿著前緣增加12個更小的電動機,飛機可在傳統跑道上起飛和降落,同時保持較小機翼獲得的飛行效率。
X-57的飛行測試將幫助NASA的工程師評估該配置的性能和實用性。這些測試也有助于指導即將到來的下一代分布式電力推進的設計。我和喬比飛機制造公司的同事已經完成了一項將類似原理應用于11座客機的可行性研究。
翼尖螺旋槳和吹氣式機翼并不是最近得益于電力推進技術而實用化的唯一策略。還有一個例子是,我和喬比飛機制造公司的同事正在開發一種五座電動飛行器,它使用傾斜螺旋槳進行垂直起飛,然后轉變為正常的飛機飛行姿態,這比直升機巡航更快、更高效。
今天大多數飛機和直升機看起來和幾十年前的機種非常相似,但正如這項工作所表明的,這即將改變。由于電力推進的靈活性,航空業在設計方面即將經歷自噴氣式發動機問世以來最偉大的復興。做好準備吧,別忘了系好你的安全帶。
-
NASA
+關注
關注
0文章
427瀏覽量
30894 -
電機
+關注
關注
142文章
8933瀏覽量
145096 -
飛行器
+關注
關注
13文章
716瀏覽量
45469
原文標題:NASA用電力推進和一大堆螺旋槳重塑機翼
文章出處:【微信號:IEEE_China,微信公眾號:IEEE電氣電子工程師】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
使用PPC3配置TAS2559后生成一大堆cfg文件,請問具體哪個cfg是需要我們用dsp6748寫進2559的呢?
【核桃派ZeroW開發板體驗連載】給ChatGPT裝上眼睛,并且還可以語音對話
ESP8266發送超過一個字節就會報錯的原因?
開源項目!用ESP8266 DIY會爬墻的無人機
NASA已經啟動Psyche的電動霍爾推進器
STM8S頭文件的 __near是什么意思?
MotorControl Workbench 5.x.x安裝在非指定目錄,生成的代碼編譯時就會出一大堆的未定義怎么解決?
為何在HTTP協議之外,我們還需要RPC協議?
RTT使用unicode編碼,編譯不通過是為什么?
單片機RAM不夠用怎么解決?
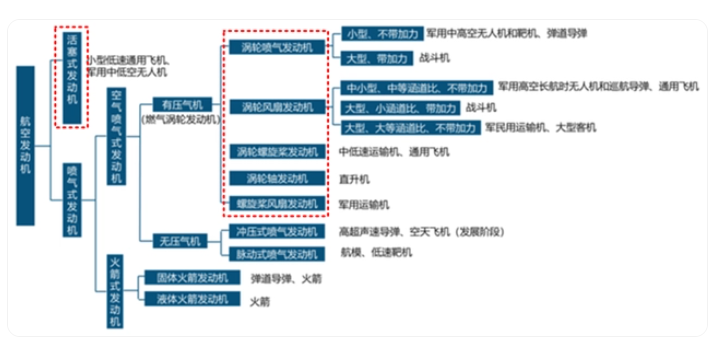
航空發動機分類及基本原理
請問如何使用ModusToolbox?估計應用程序使用的堆棧和堆空間量?
無人機“炸機”的因素分析
語音識別技術的工作原理 語音識別技術的工作流程






 工商網監
工商網監
評論