 小白如何看伺服控制系統與編碼器
小白如何看伺服控制系統與編碼器
“伺服”英文servo—詞源于希臘語“奴隸”的意思。人們想把“伺服機構”當個得心應手的馴服工具,服從控制信號的要求而動作。在訊號來到之前,靜止不動;訊號來到之后,立即轉動;當訊號消失,能即時自行停轉。由于它的“伺服-奴隸”性能,因此而得名——伺服控制系統。
伺服定義:
(1)伺服系統:是使物體的位置、方位、狀態、力矩等運動執行器的輸出,能夠跟隨輸入量(或給定值)的任意變化而變化的自動控制系統。
(2)在自動控制系統中,能夠以一定的準確度響應控制信號的系統稱為隨動系統,亦稱伺服系統。為保證這種即時響應的準確性,一般都有位置、速度、力矩的傳感器反饋比較,也稱為閉環控制。
伺服的主要任務是按控制命令的要求,對功率進行放大、變換與調控等處理,使驅動裝置輸出的力矩、速度和位置的閉環控制得非常靈活方便。
簡單的說,就是運動系統的位置、時間與力的每時每刻的“聽話”,在什么時間上在什么位置,在這個位置輸出多大的力的控制,就叫伺服控制。
這其中,如果運動系統是用電機帶動的,那么電機的位置與電機輸入的工作電流對應關系,就是伺服控制系統要解決的問題,在什么位置上輸入電機多大的電壓電流(包括相位),這個稱為位置環和電流環控制。而位置在時間上的變化量,就是速度環,速度環的變化是加速度、加加速度。從物理學我們知道,加速度對應的是力(例如重力加速度G),而電機的輸出力是有輸入的電壓電流(包括相位)推動的,那么從電機輸入來說是電流環=力,從電機傳感器的反饋來說是加速度=力,通過對于電機上傳感器的反饋,獲得位置與加速度信息,與控制輸入做比較,形成一個閉環的伺服控制系統。
旋轉編碼器是旋轉位置傳感器,輸出增量的脈沖信號(代表位置變化量)或絕對值的角度位置信號,這個信號對于時間的一次導數是速度,二次導數是加速度。因此,旋轉編碼器成為伺服系統的最佳的反饋傳感器選擇。
伺服電機:電機是最常用的運動執行器,電機驅動器直接就有位置、速度、力矩的閉環控制的,就稱為“伺服電機”。常用的伺服電機為交流永磁同步電機,有時就直接把交流永磁同步電機叫為了伺服電機。
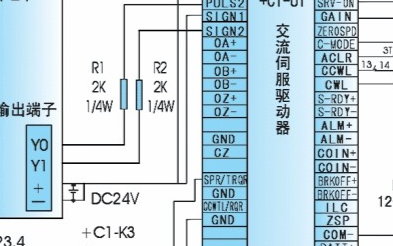
交流永磁同步電機:就是轉子是由永磁材料構成,所以轉動后,隨著電機的定子旋轉磁場的變化,轉子也做響應頻率的速度變化,而且轉子速度=定子磁力推動速度,所以稱"同步"。交流永磁同步電機因其同步性推動要求而加裝有編碼器,這種編碼器不僅僅提供角度位置信號(例如增量的脈沖信號或絕對值的數字信號),同時提供了轉子的位置換相信號(例如UVW或單圈正余弦C、D信號),角度位置信號作為位置和速度的閉環反饋,而轉子換相信號用于電機電流環-力矩的推力輸入閉環反饋,以獲得轉子同步旋轉。由此,交流永磁同步電機由于直接加裝了編碼器,已獲得位置、速度、力矩的反饋信息及閉環控制,而天然地具有了“伺服”特性。
而事實上不僅僅是交流永磁同步電機可以具有伺服特性,交流異步電機通過其控制器(變頻器)和傳感器反饋(例如編碼器),同樣可以由控制器指令實現位置、速度、甚至輸出力矩的閉環控制與隨動響應,也就一樣可以實現“伺服”系統特性。
是否能夠稱為“伺服”在于其在位置、速度、輸出力各方面的隨動響應和控制精度是否能達到使用要求,并不在于用什么電機執行器。
伺服驅動控制器在發展了變頻技術的前提下,在驅動器內部的電流環,速度環和位置環都進行了比一般變頻更精確的控制技術和算法運算,在功能上也比傳統的變頻器強大很多,主要的一點可以進行精確的位置控制。通過上位控制器發送的指令來控制速度和位置(當然也有些變頻-伺服器內部集成了控制單元或通過總線通訊的方式直接將位置和速度等參數設定在驅動器里,或稱為PG卡),驅動器內部的算法和更快更精確的計算以及性能更優良的電子器件使之更優越于變頻器。
變頻控制器與電機構成一個速度變化控制的開環控制,步進電機與驅動器構成一個位置(步進)變化的開環控制,如果在變頻電機系統或步進電機系統加裝了傳感器(例如編碼器),從而由外部指令控制器(例如PLC或集成在電機驅動器內的控制卡)也能實現位置、速度的雙閉環,并同時對于電機輸出力與停止定位上的響應保證,也就能實現一個“伺服”控制系統。
伺服控制系統不僅僅是指運動執行器電機,同樣包含了機械傳動系統,例如減速箱、推動絲杠、齒輪傳動等等,這些機械傳動系統有機械加工與裝配誤差,同時又有溫度變化、磨損及其他現場環境因素帶來的影響而產生誤差,為防止這些誤差帶來的控制精度影響,有時會在運動終端再加裝傳感器,作為反饋位置、速度信息到伺服控制系統,以修正這種誤差,這樣的控制方式稱為“全閉環”控制,例如加裝直線光柵尺或旋轉編碼器。為保證位置控制的長期準確性,需要在控制-執行系統中加裝零點位置傳感器或終端位置絕對值編碼器,絕對值編碼器因其傳感器內部預先的每個機械位置的唯一編碼,而無需擔心信號受到外部的干擾影響和停電后的位置信息丟失。
無論是交流永磁同步電機(也就是直接稱為伺服電機),還是變頻電機、步進電機等機械執行運動器,都需要由控制器、機械傳動系統、終端傳感器反饋修正,才能構成一個完整的“伺服”控制系統。伺服系統的控制精度(位置精度與隨動時間響應),由執行器電機、電機驅動器、機械傳動執行、系統總控制器等共同構成,交流永磁同步電機與驅動器因其“同步”要求的先天設計性,其伺服控制精度最高。但要保證其運動執行終端的控制精度與控制可靠性,還需要兼顧機械傳動系統的精度與終端位置傳感器(例如絕對值編碼器)的精度與可靠性保證。
例如電梯轎廂升降的閉環控制,在電梯提升的主機上已經裝有編碼器(例如德國海德漢的ERN1387),提供增量的A、B正余弦信號,每周2048個脈沖周期,同時提供單圈一個周期的C、D正余弦信號,單圈的C、D正余弦信號經過粗糙的位置分割,可以提供電機UVW的換相信息;而每周2048個周期的正余弦信號,經過更進一步的細分,可獲得高分辨率的位置變化,這種高分辨率的位置變化信息主要用于很短時間的加速度計算,因為在時間變量很小的情況下需要準確的加速度反饋,就需要有較多的位置變化信息,這就需要編碼器的分辨率非常高,并且位置精度準確,這樣可以保證獲得精確加速度反饋,以控制電機輸入電流。
但是由于電梯機械系統上的機械誤差,電梯在每層停止時仍然需要由外部的平層傳感器反饋,才能獲得準確定位,例如用平層光電開關,或者直接再用平層絕對值多圈編碼器,才能構成一個位置準確的閉環伺服系統。
實際上伺服系統需要的編碼器可能有兩個(或者只用一個),一個是在電機上高速端,針對電機的換相與加速度反饋,這個反饋進入電機驅動器,決定電機的控制電流的換相與大小(力矩環),另一個是用于位置終端低速端的準確定位。在電機端的編碼器需要高分辨率,常用高分辨率增量編碼器,以獲得加速度的精細變化量;而在運動終端的編碼器需要位置上的準確與可靠,常用絕對值多圈編碼器(也有用直線光柵尺)。
如果只用一個編碼器(例如只用電機端編碼器),那就需要在位置上依賴機械傳動部分的高精度,而目前高精度的機械傳動幾乎都掌握在日系和德系廠家手中,由他們壟斷。在終端加裝傳感器(編碼器),是避開這種壟斷的一種辦法。
在變頻器控制系統中,由于不需要電機換相信號,編碼器也就可以直接就裝在了運動終端,也稱為低速端。
我們有兩個概念,一個是伺服系統,另一個是伺服電機,這兩個并不是同一個概念。伺服電機是一種特別的執行器,它的電機驅動設計從一開始就是位置、速度、力矩的電機閉環控制,但是電機作為執行器的一部分,它并不能代表整個伺服系統。
閉環控制能不能都稱為伺服系統?不是,而是在空間(位置)精度與時間響應上達到快速控制與精度的保證。但是隨動的“快速”與位置的精度都是相對的,總是會有一定的偏差的,這也同樣是伺服的特性之一,真正做伺服的就是去消除這個偏差對于控制結果的影響。
-
編碼器
+關注
關注
45文章
3596瀏覽量
134165 -
伺服控制系統
+關注
關注
1文章
54瀏覽量
12240
原文標題:0 經驗的人,是怎么看伺服控制系統與編碼器的?
文章出處:【微信號:GKB1508,微信公眾號:工控幫】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
伺服電機編碼器原理(伺服電機編碼器幾根線以及接線圖)






 工商網監
工商網監
評論