 盤點工業機器人技術全球專利布局現狀
盤點工業機器人技術全球專利布局現狀
1920年捷克作家描寫了名叫“Robot”的幫人干苦力的機器,它是最早的工業機器人設想。隨著科學技術發展,1954年美國戴沃爾最早提出了工業機器人的概念,1958年申請了專利,1959年在美國誕生第一臺工業機器人。五十多年來工業機器人經歷了可編程示教再現型機器人、知覺判斷機器人、智能機器人三個階段,應用領域也逐漸從工業生產的民用領域轉移到軍事領域。
美、日、德等國在掌握機器人領域核心技術的同時,自20世紀60年代以來就致力于機器人技術領域的全球專利布局,以此鞏固了在全球市場范圍內的國際核心競爭力。本文旨在通過研究機器人領域的全球專利布局現狀、在華專利申請現狀以及主要競爭對手現狀,從知識產權的角度揭示我國工業機器人技術發展的機遇與挑戰。
一、工業機器人領域全球專利申請概況
截至到2014年底,工業機器人技術領域的全球專利申請量已超過6萬件,去掉重復的同族專利[1]后為3.5萬余項。最早的專利申請出現在1958年,直到1985年后,專利申請數量才開始出現大幅度增長,主要原因是中國在1985年制定《專利法》后,工業機器人領域主要競爭對手十分注重中國市場,紛紛在中國進行專利布局。目前,工業機器人技術正處于高速發展期。

圖1 工業機器人技術領域全球專利申請趨勢圖
從技術發展歷程來看,工業機器人技術共經歷三大階段:
第一階段(1958年-1969年)可編程示教再現型機器人:工業機器人領域的第一件專利是美國人喬治德沃爾在1958年申請,名為可編程的操作裝置。約瑟夫英格伯格對此專利很感興趣,聯合德沃爾在1959年共同制造了世界上第一臺工業機器人稱為Robot(中文譯名機器人),即人手把著機械手,把應當完成的任務做一遍,機器人再按照事先教給它們的程序進行重復工作,主要用于工業生產的鑄造、鍛造、沖壓、焊接等生產領域,特稱為工業機器人。
第二階段(1970年-1984年)知覺判斷機器人:這階段的工業機器人是具有一定的感覺功能和自適應能力的離線編程機器人,其特征是可以根據作業對象的狀況改變作業內容,即所謂的“知覺判斷機器人”。期間工業機器人“四大家族”:庫卡、ABB、安川、FANUC公司分別在1974年、1976年、1978年和1979年開始了全球專利布局。
第三階段(1985年-至今)智能機器人:此階段機器人帶有多種傳感器,能夠將多種傳感器得到的信息進行融合,能夠有效的適應變化的環境,具有很強的自適應能力、學習能力和自治功能。2000年以后,美國、日本等國開始了智能軍用機器人研究,并在2002年由美國波士頓公司和日本公司共同申請了第一件“機械狗”(Boston Dynamics BigDog)智能軍用機器人專利,2004年在美國DRAPA/SPAWAR支持下申請了智能軍用機器人專利。
1、工業機器人領域專利受理量國家/地區分布
從工業機器人相關專利受理數量排名前六位國家/地區(專利受理機構,基于同族專利國)的排名情況可以看出,相關專利受理數量最多的國家/地區依次是:中國、日本、韓國、美國、歐洲專利局、世界知識產權組織。這也體現了中、日、韓、美是工業機器人的主要市場。
圖 2工業機器人領域專利受理量國家/地區分布
2、工業機器人領域技術布局概況
下圖給出了工業機器人領域的全球技術布局情況,專利大都分布在機械手的結構、控制、觸摸、安全和程序控制技術,以及工業機器人的航道控制、自動控制、傳輸、多鉸接爪臂技術。
圖 3工業機器人領域技術布局
3、中國專利申請情況分析
我國工業機器人起步于1972年,其發展過程大致可分為三個階段:1972年~1985年的萌芽期;1985年~2000年的技術研發期;2000年至今的產業化期。
圖 4工業機器人在中國的專利申請情況
目前我國已生產出部分機器人關鍵元器件,開發出弧焊、點焊、碼垛、裝配、搬運、注塑、沖壓、噴漆等工業機器人。一批國產工業機器人已服務于國內部分企業的生產線上;一批機器人技術的研究人才也涌現出來。部分軍工企業、科研機構和企業已掌握了工業機器人操作機的優化設計制造技術、工業機器人控制、驅動系統的硬件設計技術、機器人軟件的設計和編程技術、運動學和軌跡規劃技術等技術,某些關鍵技術甚至已達到或接近世界先進水平。但是,在華專利申請數據顯示,瑞士的ABB、日本的FANUC(發那科)、日本的YASKAWA(安川電機)、德國的KUKA(庫卡)已經在我國申請了大量專利,中國申請人集中在蘇州工業園區職業技術學院、昆山市工業技術研究院、湖南大學、清華大學等高校,我國擁有技術優勢的科研院所和企業反而不太關注工業機器人技術領域的專利布局。
二、主要競爭對手概況
在民用領域,國際上占據了工業機器人絕大部分市場的“四大家族”:安川、FANUC、KUKA、ABB公司,自上世紀70年代中期開始了全球專利布局,并且逐年上升。同時,“中國增長”讓全球領先的工業機器人巨頭都把目光投向這塊土地,不約而同的是,總部在瑞士的ABB、日本的FANUC(發那科)、日本的YASKAWA(安川電機)、德國的KUKA(庫卡)都將其中國總部設在上海。目前,這四家企業在中國市場占有率總共達到八成以上,前三家在全球的機器人銷量都突破了20萬臺。
在軍用領域,由美國政府支持的軍用機器人開發商占據了全球軍用機器人市場的85%,歐洲占據15%,而中國僅為0.1%。軍用機器人領軍企業General Dynamics市場占有率為27%,諾格公司、洛克希德-馬丁公司緊隨其后。
1、日本安川電機(Yaskawa)
1915年合資公司安川電機制作所成立。安川電機自1977研制出第一臺全電動工業機器人以來,旗下擁有Motoman美國、瑞典、德國以及Synetics Solutions美國公司等子公司,至今共生產13萬多臺機器人產品,而最近2年生產的機器人3萬多臺,超過了其他的機器人制造公司。2005年4月,該公司宣布將投資4億日元,建造一個新的機器人制造廠,該公司每月工業機器人生產能力將達到2000臺。安川公司在全球申請的機器人相關專利4505件,去掉重復的同族專利為1949項同族專利。

圖 5安川電機的專利申請情況
2、日本FANUC
日本發那科公司(FANUC)創建于1956年,是當今世界上數控系統科研、設計、制造、銷售實力最強大的企業,研發人員占公司總人數的1/3/。1974年, FANUC工業機器人問世——基于伺服、數控基礎,1976年投放市場。FANUC公司在全球申請的機器人相關專利5507件,去掉重復的同族專利為1476項同族專利。
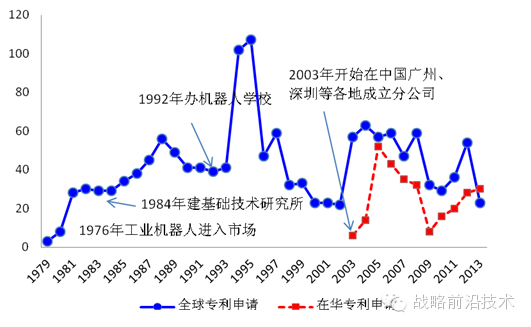
圖 6發那科公司的專利申請情況
3、德國KUKA
KUKA公司成立于1898年,總部設在德國奧格斯堡,是為汽車制造、航天、能源及工業領域提供柔性自動化系統設備的公司。2000年9月,庫卡自動化設備(上海)有限公司正式成立。2004年7月,庫卡柔性系統制造(上海)有限公司在上海青浦工業園成立。2008年12月,在上海交通大學成立“KUKA焊接機器人智能化與工程應用聯合實驗室”。KUKA公司在全球申請的機器人相關專利2383件,去掉重復的同族專利為802項同族專利。
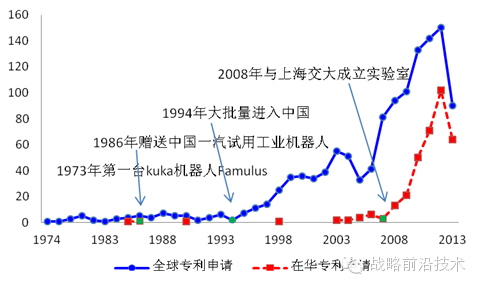
圖 7德國KUKA公司的專利申請情況
4、瑞士ABB
ABB是由兩個歷史100多年的國際性企業瑞典的阿西亞公司(ASEA)和瑞士的布朗勃法瑞公司(BBC Brown Boveri)在1988年合并而成,兩公司分別成立于1883年和1891年。ABB集團的業務遍布全球100多個國家,擁有107,000名員工,ABB集團超過一半的營業額來自歐洲市場,近四分之一來自亞洲、中東和非洲,五分之一來自南北美洲市場。ABB公司在全球申請的機器人相關專利3389件,去掉重復的同族專利為923項同族專利。
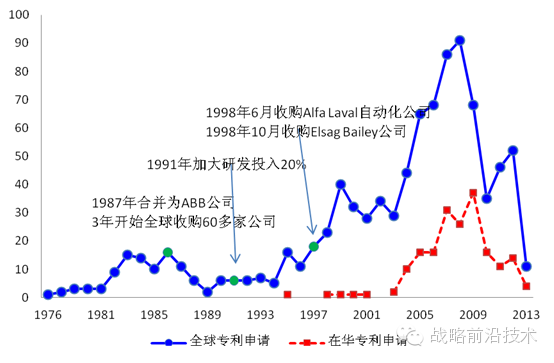
圖 8瑞士ABB公司的專利申請情況
5、美國波士頓動力公司(Boston Dynamics)
美國波士頓動力公司自1998年以來共申請專利8項,其中美國5項,日本1項,世界知識產權組織2項。其中一項發明專利US2004864715A是獲得美國政府DARPA/SPAWAR計劃支持,該專利權屬于國家。該公司的主要研發團隊人員有13人,核心技術研發人員是Playter Robert、Raibert Marc、Buehler Martin 、Saunders Aaron ,尤其是Saunders Aaron參與了波士頓動力公司近年的每一項智能機器人項目研發,是高級智能四足仿生機器人BigDog的研發核心力量。
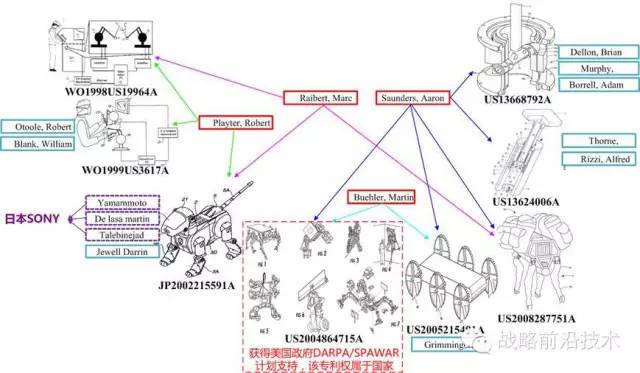
圖 9波士頓動力智能機器人研發現狀
波士頓機械狗(Boston Dynamics BigDog)是一種動力平衡四足機器人,由波士頓動力公司、福斯特-米勒公司、噴氣推進實驗室,以及哈福大學康德菲爾德研究站共同研發。
BigDog
專利US2008287751A
圖 10波士頓動力公司智能機器人產品與專利對應情況
2002年7月申請的專利JP2002215591A寵物機器人揭示了波士頓動力公司最初的智能四足仿生機器人BigDog的技術來源,該專利顯示相關技術是由日本SONY公司與波士頓動力聯合研發,并由雙方共有相關專利。該專利披露了采用螺旋式彈簧維持伺服電機與腿部末梢的線性關系,并給出了具體的實現方法與相關試驗數據。
三、啟示與建議
1、國內外工業機器人市場面臨知識產權風險
安川、FANUC、KUKA、ABB公司四大公司在上世紀70年代開始了全球專利申請,分別于1995年、2003年、1985年、1996年開始在中國進行專利布局,尤其是KUKA公司在中國專利申請量最大。四大公司所申請的部分專利的技術特征與國內某些企業相關工業機器人產品類似,建議后續針對具體的產品做詳細的專利侵權分析。國內大部分工業機器人相關技術還有部分處于研發階段,一方面可以根據關鍵技術的專利現狀進行規避設計或者調整研發路線,避免后續知識產權風險;另一方面可以針對具體的亟待的技術問題和難點在專利文獻中尋找技術解決方案。
2、工業機器人技術產業化應以專利為突破口
從四大民用公司的專利申請趨勢來看,每一次技術產業化的時間點都是專利申請量的峰值,尤其是日本企業。專利是產品進入市場的保護傘,專利申請的時間和地域選擇與產業化發展方向密切相關。例如,日本FANUC公司在2003年以前從未在華申請機器人相關專利,主要是防止泄漏相關技術,但是于2003年在中國廣州、深圳等地設立近十家分公司,同年就開始了在華地區的專利申請,專利申請量急劇上升,這樣不僅可以保護自身產品,還能遏制競爭對手的發展。
3、收購具有技術研發實力的公司是快速提升競爭力的方式
收并購國內外具有自主知識產權、較強的研發團隊以及領先的市場地位的相關企業也逐漸成為國內企業快速提升規模、提升核心競爭力、快速完成國際化經營布局的重要途徑,也是軍工企業實現軍民融合式發展、產業快速轉型升級和結構調整的便捷之路。一方面可以直接獲得大量專利,另一方面是可以獲得具有研發實力的團隊。例如,ABB公司從1987年開始的3年內收購了全球60多家公司,但是機器人技術方面并未快速發展,但是自從1998年6月收購Alfa Laval自動化公司,1998年10月收購Elsag Bailey公司之后,機器人相關專利申請急速上升,自此開始保持了技術優勢。
其中,KUKA是德國公司,相較于美國、日本來說更易于技術合作,并且KUKA進入中國市場較早,可見其對中國市場的關注度高,一開始進入中國是1986年贈送中國一汽工業機器人的友好方式。2008年KUKA與上海交大聯合成立實驗室,是比較有機會進行技術合作或者引進相關人才的。此外,KUKA在中國的專利申請量較大,已經具備了一定的技術優勢,與其聯合可以避免更多的知識產權風險。
4、工業機器人技術轉化應用應關注“民轉軍”
2000年后,美國逐漸開始將工業機器人技術轉化應用到軍事領域,并且在2011年發布了針對針對制造、健康護理/醫藥機器人、服務機器人三類機器人的國家機器人技術倡議(NRI),明確了美國機器人技術發展路線,但是在2013年發布的美國機器人技術發展路線圖中新增加了航天和國防領域機器人技術發展規劃。同時,美國在花巨資研究軍用機器人時十分注重相關知識產權保護,例如美國波士頓動力公司的發明專利US2004864715A顯示,該專利已獲得美國政府DARPA/SPAWAR計劃支持,同時也規定其專利權屬于國家;另一方面,美國的軍用機器人研發采取多方合作,例如波士頓BigDog最初的技術就是來源于日本SONY公司與波士頓動力公司聯合研發,從其他媒體報道顯示,該型號還與福斯特-米勒公司、噴氣推進實驗室、哈福大學康德菲爾德研究站進行了聯合開發。
建議國內企業在工業機器人產業論證中開展完整的專利分析評議,開展關鍵技術的專利分析能夠提高技術研發起點、優化資源配置、加快研究進程,實現關鍵技術突破并進行再創新,從而快速提升技術創新能力;同時,掌握國外對標公司的專利布局、摸清型號發展與國外技術指標的差距,滿足研發過程中對科技情報支撐信息的迫切需求。在此基礎上,結合企業工業機器人產業領域技術優勢和技術劣勢,分析國外高新技術熱點、空白點、發展動態和方向,為產業提出知識產權布局建議,為戰略研究、項目論證、項目立項提供決策支撐。
-
專利
+關注
關注
3文章
583瀏覽量
39184 -
工業機器人
+關注
關注
91文章
3352瀏覽量
92564
原文標題:工業機器人技術全球專利布局現狀及啟示
文章出處:【微信號:jingzhenglizixun,微信公眾號:機器人博覽】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
醫療機器人發展現狀與趨勢
工業機器人常用的編程方式
工業機器人視覺技術的應用分為哪幾種?
工業機器人abb左邊布局沒了怎么辦
abb工業機器人的編程語言是什么
普渡機器人推出首款工業配送機器人PUDU T300
視覺機器人焊接的研究現狀

工業機器人連接解決方案

基于智能制造的工業機器人應用實踐
LabVIEW的六軸工業機器人運動控制系統
工業機器人產業發展及應用現狀

中國人形機器人產業拆解分析
深度分析全球范人形機器人技術專利布局趨勢






 工商網監
工商網監
評論