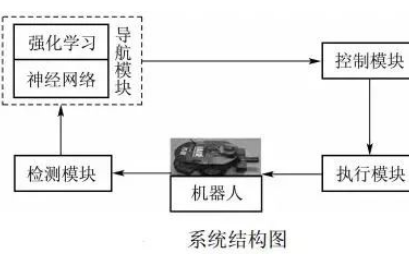
 移動機器人智能的一個重要標志是智能導航
移動機器人智能的一個重要標志是智能導航
移動機器人智能的一個重要標志是智能導航,而實現機器人智能導航有個基本要求——避障。
目前,避障使用的傳感技術主要有激光傳感技術、視覺傳感技術、超聲傳感技術、紅外傳感技術等。
下面讓我們來了解下這幾大類傳感技術:
1、激光傳感技術
激光測距傳感技術利用激光來測量到被測物體的距離或者被測物體的位移等參數。比較常用的測距方法是TOF激光雷達測距和三角法激光雷達測距。
(1) TOF測距激光雷達的工作原理:通過電機帶動旋轉,將激光脈沖不斷投射到障礙物同時接收反射回的激光脈沖,將光速與飛行時間差相乘,求得雷達到相應障礙物的距離。
圖1 TOF測距激光雷達的工作原理
(2)三角法測距激光雷達的工作原理:主要針對室內的中近距離測距。
圖2 三角法測距激光雷達的工作原理
2、視覺傳感技術
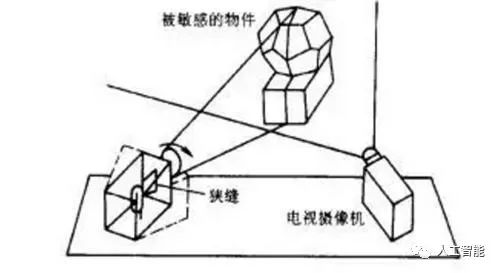
圖3 視覺傳感技術測距的工作原理
視覺傳感技術,使用多個視覺傳感器或與其它傳感器配合使用,通過一定算法可得到物體的形狀、距離、速度等諸多信息。或是利用一個攝像機的序列圖像來計算目標的距離和速度。
但在圖像處理中,邊緣銳化、特征提取等圖像處理方法計算量大,實時性差,對處理機要求高。
另外,視覺測距法檢測不到玻璃等透明障礙物的存在,另外受視場光線強弱、煙霧的影響大。
3、超聲波傳感技術
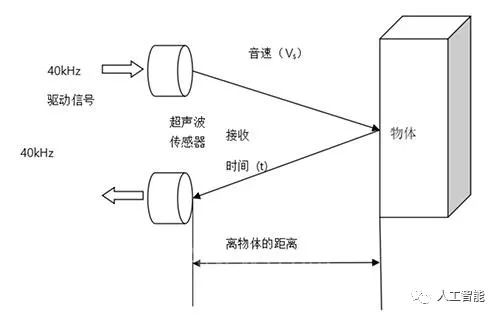
圖4 超聲波傳感技術測距的工作原理
超生波傳感技術檢測距離原理是測出發出超聲波至再檢測到發出的超聲波的時間差,同時根據聲速計算出物體的距離。
由于超聲波在空氣中的速度與溫濕度有關,在比較精確的測量中,需把溫濕度的變化和其它因素考慮進去。
超聲波傳感器一般作用距離較短,普通的有效探測距離都在5-10m之間。
4、紅外傳感技術
圖5 紅外傳感技術測距的工作原理
大多數紅外傳感技術測距都是基于三角測量原理。紅外發射器按照一定的角度發射紅外光束,當遇到物體以后,光束會反射回來。
但測量時受環境影響很大,物體的顏色、方向、周圍的光線都能導致測量誤差,測量不夠精確。
-
移動機器人
+關注
關注
2文章
757瀏覽量
33544 -
傳感技術
+關注
關注
4文章
528瀏覽量
46267 -
激光雷達
+關注
關注
967文章
3940瀏覽量
189602
原文標題:移動機器人如何實現自主導航?
文章出處:【微信號:worldofai,微信公眾號:worldofai】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
Labview My RIO 移動機器人
如何實現移動機器人的設計?
什么是移動機器人軟硬件系統問題
【科普】干貨!帶你從0了解移動機器人(三) ——自主導航系統及上位機軟件設計與實現
【科普】干貨!帶你從0了解移動機器人(四) ——移動機器人導航技術






 工商網監
工商網監
評論