 基于新一代數字信號處理技術的新型電機控制方案
基于新一代數字信號處理技術的新型電機控制方案
面向電機和功率級動態特性的高級建模技術可以大幅提高電機控制效率,確保根據系統行為的實時變動實行精密控制。通過無傳感器矢量控制技術,設計人員可以增強電機系統的性能,降低功耗,并且符合旨在提高能效的新法規要求。
在過去十年中,隨著永磁體材料的不斷發展和勘測到的資源越來越容易開采,采用永磁體同步電機(PMSM)的工業應用高性能變速電機越來越多。使用PMSM驅動的先天優勢包括:高扭矩重量比、高功率因數、響應更快、結實耐用的構造、易于維護、易于控制以及高效率。高性能速度和/或位置控制要求準確判定轉軸位置和速度,使相位激勵脈沖與轉子位置同步。 因而電機軸上需安裝絕對編碼器和磁性旋轉變壓器等速度和位置傳感器。然而,在大多數應用中,這些傳感器會帶來多種弊端,例如:可靠性遞減,易受噪聲影響,成本和重量增加,以及驅動系統更復雜等。無傳感器矢量控制則不需要速度/位置傳感器,因而這些問題也就不復存在。
近年來,關于PMSM的無傳感器速度和位置控制方法,研究文獻中提出多種解決方案。 針對PMSM驅動的無傳感器轉子位置估計,已開發出三種基本技術:
? 基于反電動勢(BEMF)估計的各種技術? 基于狀態觀測器和擴展卡爾曼濾波器(EKF)的技術? 基于實時電機建模的其他技術
反電動勢技術
基于反電動勢技術的位置估計根據電壓和電流估計磁通量和速度。在較低速度范圍內,這種技術對定子電阻特別敏感。由于機器的反電動勢很小,并且開關設備的非線性特征會產生系統噪聲,因此很難得到關于機器終端的實際電壓信息。在中高速范圍內,利用反電動勢方法可以獲得較好的位置估計,但在低速范圍內則不行。
反電動勢電壓的幅度與轉子轉速成比例,因此靜止時無法估計初始位置。所以,從未知轉子位置啟動可能伴隨著暫時反向旋轉,或者可能導致啟動故障。EKF能夠對隨機噪聲環境中的非線性系統執行狀態估計,因而對于PMSM的速度和轉子位置估計,似乎是可行且具計算效率的候選方法。
基于空間顯著性跟蹤的技術利用磁顯著性,適合零速工作,可以估計初始轉子位置,而不會受其它參數影響。針對初始轉子位置,主要有兩種基本方法,分別基于脈沖信號注入和正弦載波信號注入。
我們看一個例子。
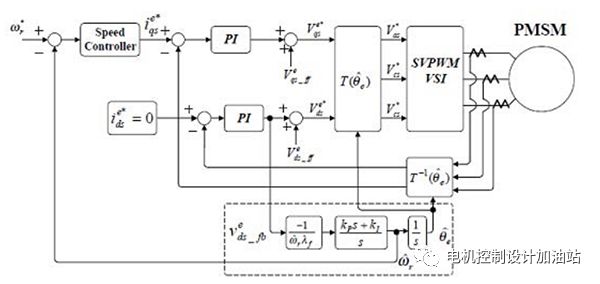
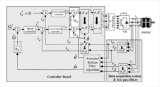
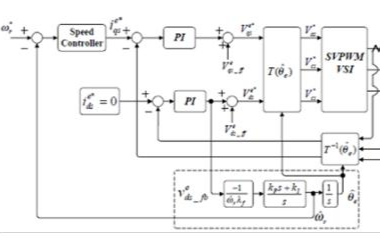
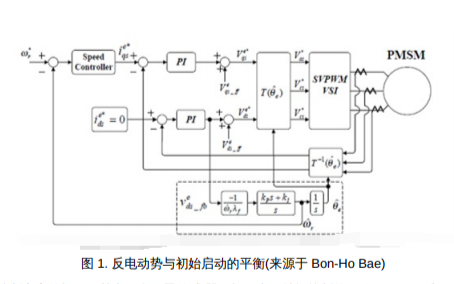
圖1. 反電動勢與初始啟動的平衡(來源于Bon-Ho Bae)
圖1為無傳感器矢量控制方案的框圖,其中不含位置傳感器。框圖中,軸間控制的正饋項Vds_和Vqs_可以表示為:
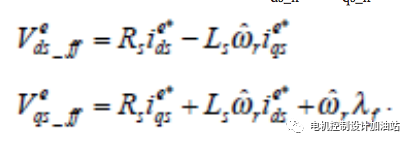
其中,ωr為轉子的轉速。只看內置式PMSM (IPMSM)的標準電壓公式,坐標系可以表示為:
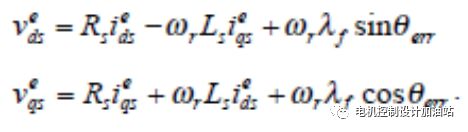
其中,θerr為實際角度與估計角度之間的差值。現在重新定位d軸,可以得到:

假定電流PI調整器將產生小誤差,θerr很小,d軸可以表示為:
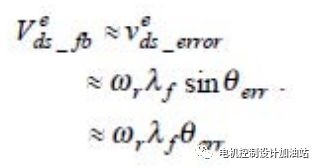
在圖1的建議估計器及所導出的公式中,誤差信號Vds_error由PI補償器處理,以導出轉子的轉速,而轉子的角度則通過對估計的速度進行積分而算得。其它常見方法用微分法計算速度,但這會使系統易受噪聲影響。Bon-Ho Bae的實驗研究表明,建議估計器能夠為應用提供非常準確且可靠的速度信息。但在零速和低速時,反電動勢電壓不夠高,無法用于所建議的矢量控制。因此,對于從零速度開始的無縫操作,估計器利用恒定幅度和預定模式頻率來控制電流。這里,同步坐標系的角度通過對頻率進行積分而導出(初始啟動方法)。
EKF技術
我們現在看另一個利用EKF技術原理的例子(來源于Mohamed Boussak),并且同樣與初始啟動相結合。
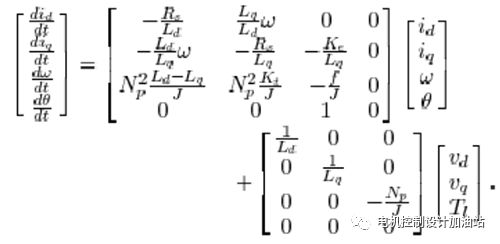
從PMSM的基本公式開始,將其重寫為四階動態模型:

其中:

PMSM所產生的扭矩為:

動態模型基于一些簡單的假設,忽略正弦反電動勢和渦電流,于是可以得到:
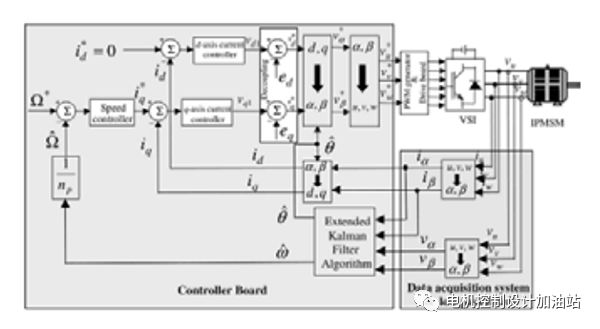
由于d軸和q軸之間存在交叉耦合效應,如圖2所示,因此兩個軸的電流無法由電壓Vd和Vq獨立控制。為實現高性能速度控制,需要運用具有去耦正饋補償功能的d軸和q軸電流調整器。更多信息請參考圖3。
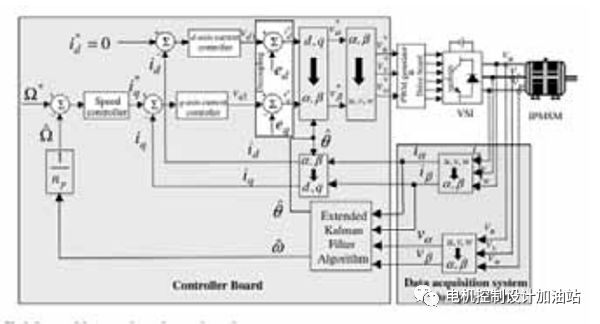
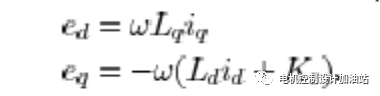
為使IPMSM的扭矩電流比最大,d軸基準電流i*d設置為0。q軸基準電流i*q從速度調整器的速度誤差獲得,如圖3所示。電流調整器的輸出提供旋轉坐標系的基準電壓。在圖3所示的框圖中,用于去耦控制的正饋項ed和eq由下式給出:
正如Boussak所述,兩個補償機制(電流控制和電壓命令)對于確保穩定和最優控制十分重要,有助于增強矢量控制和弱磁控制。
EKF以其簡單、最佳、易控制和穩定可靠,成為應用最廣泛的非線性系統跟蹤和估計方法之一。為實現對凸極IPMSM的無傳感器控制,可以利用EKF估計速度和轉子位置。電機的線路電壓和負載扭矩均為系統矢量輸入變量。速度和轉子位置是需要估計的兩個幅度,二者與電機電流一起構成狀態矢量。電機電流將是構成輸出矢量的唯一可觀測幅度。要對無傳感器IPMSM驅動實施EKF技術,雙軸坐標系的選擇至關重要。最佳選擇是采用轉子上安裝的d軸和q軸旋轉坐標系。但估計器的輸入矢量(電流和電壓)取決于轉子位置,所以這種方案與IPMSM無傳感器速度控制不兼容。實施過程中可觀察到,轉子初始位置的估計誤差可能會將誤差引入EFK相對于實際系統的處理過程中,從而引起嚴重后果。
對于這種情況,Boussak建議在轉子坐標系中調準IPMSM控制。速度和位置僅利用定子電壓和電流測量結果來估計。基于EKF的觀測器所使用的電機模型含有安裝于定子框架上的固定坐標系α-β,因此獨立于轉子位置。導出IPMSM在固定坐標系中的非線性動態模型,以完成估計器公式:
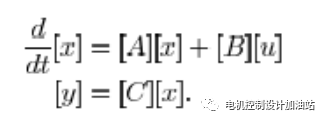
兩個定子電流、電機速度和位置用作系統狀態變量(更高級計算方案請參考Boussak的論文)。
諸如Bon-Ho Bae和Boussak所開發的部署方法,利用無傳感器控制器的可行性將更高級模型引入實時電機控制方案。
過去5年來,微控制器和DSP制造商一直積極通過新型嵌入式處理器提供足夠的性能和必要的功能, 這是確保設計人員將現代矢量控制運用于實際的關鍵因素。
電機效率始于處理器
如今,像ADI公司的最新ADSP-CM40x ARM Cortex-M4系列等增強型處理器正在將性價比提升到新的水平,使得更復雜電機控制算法的實施開始受到大規模應用解決方案的青瞇。尤其在處理器能力方面——內置數字濾波器功能、高性能浮點能力和擴展數學運算能力等都支持更復雜、集成度更高的算法,以便提供更佳的控制器和控制方案,迫使電機驅動的效率接近100%。在工業領域,對運行實時模型估計器的多觀測器模型的改善,無疑將有助于增強:(i)驅動性能,(ii)系統效率和拓撲結構,以及(iii)設計的部署方法。就第(iii)方面而言,MATLAB/Simulink?等圖形系統便能夠簡化設計流程,促進新算法的開發。這些工具與執行處理器相結合,能夠實現更為復雜的部署方案。與內核速度、模數轉換精度和存儲器集成有關的處理器級改善將使設計人員能夠實現更高的質量和性能目標,同時加速產品上市。
ADI公司最近推出ADSP-CM40x系列混合信號嵌入式控制器,不僅大幅提升了處理器性能,而且降低了價格,使得以前采用性能受限的處理器和微控制器的電機控制應用也能享用DSP水平的性能。借助這種處理性能,電機系統設計人員可以利用更先進的算法實現更強的系統功能和更高精度,精確判定轉軸位置和速度,這樣系統就無需位置和速度傳感器。
用于加速算法處理的閃存,二者均有利于減少片外器件并降低系統整體成本。這些處理器提供性能與片內集成度的最佳融合,使得設計人員能夠實現許多系統級設計目標,例如:實時處理更多數據,延時更短,將處理任務集中于單個處理器進行,以及更靈活地優化系統接口和控制能力。如今,新技術正在推動電機系統能力實現范式轉換,設計拓撲結構與處理器特性平衡則可實現更高的整體系統性能和效率。高性能處理器/DSP支持運用現代高效控制理論完成高級系統建模,從而確保所有實時電機系統都能實現最佳電源和控制效率。無傳感器矢量控制的廣泛應用勢在必行,必將加速全球提高工業設備能效和性能的進程。
-
傳感器
+關注
關注
2548文章
50678瀏覽量
752010 -
電機控制
+關注
關注
3526文章
1857瀏覽量
268378
原文標題:面向高效電機控制的無傳感器矢 量控制技術繼續發展
文章出處:【微信號:motorcontrol365,微信公眾號:電機控制設計加油站】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
M 系列DAQ 設備—新一代數據采集標準常見問題解答
基于UCD3138的高整合度新一代數字電源方案
DSP數字信號處理簡述
新一代數字信號處理器—TMS320C6201
新一代數字RF信號分析和信號仿真系統測試
Octasic公司推出第二代數字信號處理器內核
支持新一代工業檢查系統的多核DSP
面向高效電機控制的無傳感器矢量控制技術繼續發展
面向高效電機控制的無傳感器矢量控制技術繼續發展






 工商網監
工商網監
評論