 自動駕駛基礎之傳感器融合
自動駕駛基礎之傳感器融合
隨著傳感器技術、成像技術、雷達、LiDAR、電子設備和人工智能技術的進步,數十種先進駕駛輔助系統(ADAS)功能已得以實現,包括防撞、盲點監測、車道偏離報警和停車輔助。通過傳感器融合同步此類系統的運行,以允許全自動駕駛車輛或無人駕駛車輛對周圍環境檢測,并警告駕駛員潛在的道路危險,甚至可以采取獨立于駕駛員的規避動作來避免碰撞。
自動駕駛汽車還必須能在高速情況下區分并識別前方物體。使用距離判斷技術,這些自動駕駛汽車必須快速構建出約100米遠道路的3D地圖,并能在250米遠的距離上創建出高角分辨率的圖像。如果駕駛員不在場或者不掌握駕駛,汽車人工智能必須做出最優決策。
此任務的幾種基本方法之一是,測量能量脈沖從自動駕駛汽車發出到目標再返回車輛的往返飛行時間(ToF)。當知道脈沖通過空氣的速度時,就可以計算出反射點的距離。這個脈沖可以是超聲波(聲納),也可以是無線電波(雷達)或激光(LiDAR)。
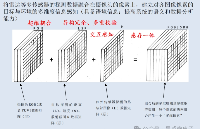
這三種ToF技術,想擁有更高的角分辨率圖像,LiDAR是最好的選擇,這是因為LiDAR圖像的衍射(光束散度)更小,對鄰近物體識別能力比雷達更優秀(見下圖)。對于高速情況下需要足夠時間來應對如迎頭相撞等潛在危險,更高的角分辨率尤為重要。
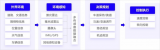
下圖是無人駕駛的偏算法層的系統框架。從左邊看,這是一個傳感器的輸入,如激光雷達、攝像頭、毫米波、GPS、編碼器和 IMU。這些傳感器的數據輸入到系統的感知算法里,通過這個感知算法,處理器會將這些數據進行處理分析,如何將靜態的物體分離出來,并如何識別、分類與跟蹤動態物體。
高精度地圖的獲取很大程度依賴激光雷達以及攝像頭。我們獲取高精度地圖后,結合 GPS 和 IMU、編碼器、實時感知環境的特征,進行地圖匹配以及進行定位。對于路徑規劃和運動控制,最終是結合車輛的CAN 總線,對車進行控制。
Google 的自動駕駛汽車 Google Car就是綜合使用了上述傳感設備采集感知環境信息進行處理,并對車輛做出控制。
Google Car上最重要也是最貴的器件就是頭頂的這臺Velodyne Lidar公司生產的HDL-64E64線激光發射器了。它可以一邊旋轉一邊不間斷的發射64束最遠射程可達120米的激光束,并接收反射回來的光束,依據返回時間的差別計算出物體與汽車之 間的距離。從而繪制出汽車周圍實時的3D地形圖。并且因為光束非常密集并且刷新頻率非常快,綜合探測數據后還可以判斷出物體的形狀、大小和大致的運動軌 跡,以此作為接下來行動的判斷依據之一。HDL-64E的性能非常強大。每秒可以給Google Car的處理器提供130萬組數據,這可以保證提供給Google Car處理器的信息幾乎是實時的。當然這也對處理器提出了更高的要求。下圖就是在HDL-64E的運作下Google Car看到的世界。這個Google Car眼中的世界,也是未經處理器處理過的原始數據樣貌。
Google Car會將收集到的數據與車體內置的谷歌地圖已有的信息進行整合,從而判斷出相當精確的四周的狀況,為做出反應打下良好基礎。
理論上HDL-64E已經足以確定汽車的位置了。但在環境復雜的道路上,駕駛者和行人的安全都需要多重保障。因此谷歌給Google Car配了更直觀的眼睛:攝像頭。Google Car有一對向前的攝像頭,其之間有著一定的距離。從兩個攝像頭傳回的畫面的視差就像人的兩只眼睛一樣,可以幫助車輛判斷自己的位置、行進的速度等信息。Google Car的車胎輪轂上同樣帶有位置傳感器,用于探測車輪轉動,也能幫助車輛進行定位。再同GPS得出的數據進行整合。數組數據共同保證車輛定位的準確性。
另外,攝像頭還可以辨識出路上出現的交通標志和信號燈等物體,以保證自身的運行會嚴格遵守交通規則。這點是激光發射器很難辦到的。信號燈、斑馬線、行車線、限速標識……交通標示無處不在,它們是道路安全的保證。
HDL-64E是有一定判斷物體運動軌跡和速度的能力的。但其獲得的數據畢竟不實時,并且要將其與車輛自身的速度結合,計算出兩者的相對運行速度,還需要許多額外的計算量。因此谷歌為車輛前后都配備了車載雷達,它們可以很精確的測出前后車輛與GoogleCar的相對速度,以此判斷接下來的車速該如何變化。
以上所有傳感器的數據都會匯集起來并傳輸給位于汽車右后方的主處理器(AI處理器)進行處理,由于所有數據都是實時的,因此流量異常龐大(可達到1GB每 秒)。因此Google Car的車在計算機的性能也是非常強的。處理器會參照各傳感器提供過來的數據,并繪制出一份最終的周邊環境地形圖。
它會將所有對其意義不同的物體用不同的顏色標示出來。如粉色代表暫時不會與行進路線相交的物體,綠色代表已經阻擋在行進路線上的物體等。然后車內的程序,或者說AI就會對路況作出判斷,隨時根據道路情況決定汽車下一步的行動。下圖就是經過車載處理器處理后的世界的樣子了。
Google Car的AI已經具有相當程度的道路智能,規劃目的地路線這樣的小事早已不值一提,在遇到一些臨時或者突發的事件的時候GoogleCar也能及時作出合適的反應:比如在交通燈變綠色的時候,汽車開始拐彎,但這時有路人從前面走過,這時GoogleCar將會讓路。另一個例子是,在通過沒有紅綠燈的十字路口的時候,它會根據大家通用的守則讓其它車先過,如果其它車輛沒有反應,它在通過路口之前將先往前行進一點,以表明自己的意圖。
了解了谷歌為保護道路安全設置的諸多保險措施、完善的檢測和判斷機制,再結合Google Car的表現,我們很有理由相信無人駕駛汽車在不遠的將來就將大面積替代有人駕駛的車輛。事實上,早在2012年,美國內華達州機動車輛管理局就已經為 Google Car頒發了美國首個“自動駕駛”汽車的車牌。使得GoogleCar可以合法上路,盡管該法規同時規定該車上路時車上必須至少有2人在監視車輛的運行狀況。但這更多只是因為技術暫時的不成熟而做出的一個臨時的限制條款。我們有理由相信,不會分神、疲勞、能隨時兼顧周圍所有狀況的車載AI的駕駛能力終有一天會超過人類駕駛員。
-
傳感器
+關注
關注
2548文章
50678瀏覽量
751993 -
自動駕駛
+關注
關注
783文章
13683瀏覽量
166147
原文標題:自動駕駛基礎之——傳感器融合
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
MEMS技術在自動駕駛汽車中的應用
感知融合為自動駕駛與機器視覺解開當前無解場景之困
人工智能的應用領域有自動駕駛嗎
FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
自動駕駛識別技術有哪些
自動駕駛的傳感器技術介紹
自動駕駛汽車傳感器有哪些
XV7181BB 陀螺儀傳感器在自動駕駛設備中的應用

揭秘自動駕駛:未來汽車的感官革命,究竟需要哪些超級傳感器?
康謀技術 |深入探討:自動駕駛中的相機標定技術

探索自動駕駛傳感器仿真模型的可信度
全球自動駕駛市場分析報告





 工商網監
工商網監
評論