") 從技術(shù)市場等角度對激光雷達進行概述
從技術(shù)市場等角度對激光雷達進行概述
激光雷達憑借其探測距離遠、精確度高的特點成為自動駕駛環(huán)境感知系統(tǒng)是最不可或缺的一種傳感器,但又因為其環(huán)境適應(yīng)能力差等缺點注定了不能是唯一的一種。
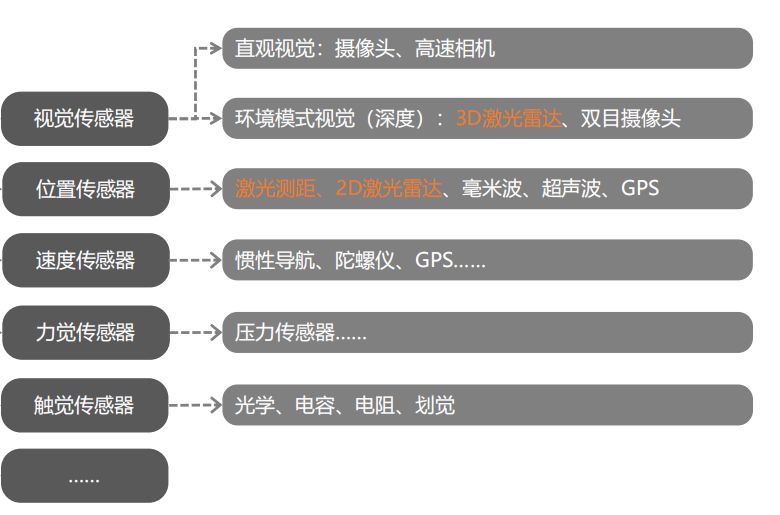
環(huán)境感知傳感器種類
環(huán)境感知相關(guān)的傳感器不止激光雷達一種,上圖展示了相關(guān)類型,其中應(yīng)用到自動駕駛汽車中的傳感器主要有激光雷達、毫米波雷達以及攝像頭等。
下面從探測距離、可靠度、行人判別、夜間模式、惡劣天氣、細節(jié)分辨等維度對激光雷達、毫米波雷達、攝像頭三種傳感器的性能進行對比如下圖。
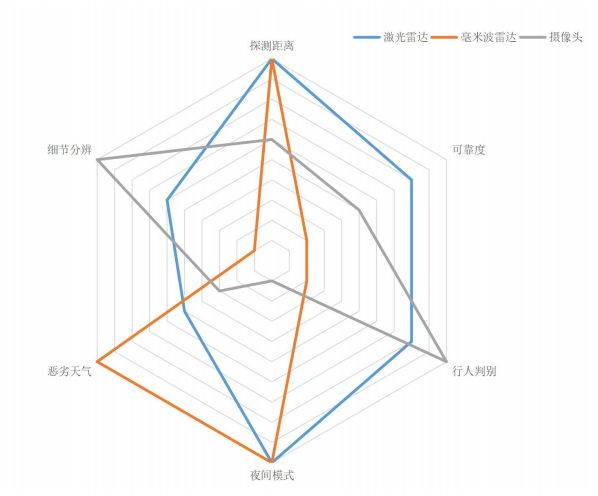
通過上圖可以直觀看出,激光雷達是三種環(huán)境感知傳感器中綜合性能最好的一種,這也就決定了它是自動駕駛汽車等機器人環(huán)境感知系統(tǒng)中不可或缺的一部分。
但是由于激光雷達在天氣適應(yīng)性和細節(jié)分辨上有明顯短板,因此絕不會是環(huán)境感知系統(tǒng)中唯一的傳感器。
根據(jù)維度分類,激光雷達分為一維激光雷達、二維激光雷達、三維激光掃描儀和三維激光雷達。其中自動駕駛車輛中應(yīng)用的就是三維激光雷達。

不同維度激光雷達功能及應(yīng)用場景
在自動駕駛車輛中應(yīng)用的三維激光雷達,目前以自動駕駛系統(tǒng)訓(xùn)練為主要應(yīng)用,測試市場為主的情況下,對產(chǎn)品的標準化成都要求不高,耐用性和可靠性要求也不高,價格敏感度低,目前全球市場主要被VELODYNE主導(dǎo)。
技術(shù)分析
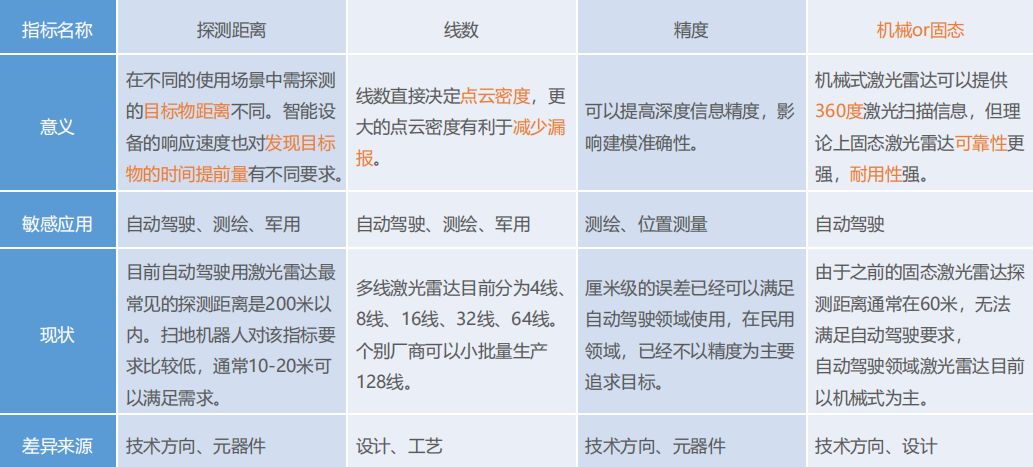
激光雷達模塊的關(guān)鍵技術(shù)如下表:
激光雷達分為固態(tài)激光雷達和機械式激光雷達兩類。它們的區(qū)分主要看激光發(fā)射器是固定的還是運動式的。
機械式激光雷達的優(yōu)點為掃描速度快、 接收視場小、可承受高的激光功率等。缺點為結(jié)構(gòu)笨重;由于內(nèi)部光路結(jié)構(gòu),反射信號接收比低;裝調(diào)工作量大。
以Velodyne全家桶為例,發(fā)射系統(tǒng)和接收系統(tǒng)存在宏觀意義上的轉(zhuǎn)動,也就是通過不斷旋轉(zhuǎn)發(fā)射頭,將速度更快、發(fā)射更準的激光從“線”變成“面”,并在豎直方向上排布多束激光形成多個面,達到動態(tài)3D掃描并動態(tài)接收信息的目的。但由于其復(fù)雜的機械結(jié)構(gòu),平均的失效時間僅1000-3000小時,難以達到整車廠們的最低要求的13000小時。
Velodyne機械式激光雷達
機械式激光雷達構(gòu)成組件
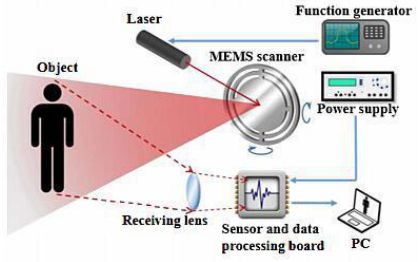
固態(tài)激光雷達的發(fā)射源和接收器都是固定在一個裝置內(nèi)不動的,它會通過一系列的方法把激光導(dǎo)向空間的各個方向,實現(xiàn)對周圍空間的掃描,一般分為MEMS( Micro-Electro-MechanicalSystem)、光學(xué)相控陣激光雷達(OPA,Optical Phased Array)和泛光面陣式激光雷達(Flash)。
MEMS( Micro-Electro-MechanicalSystem),微機電系統(tǒng),指尺寸在幾毫米乃至更小的高科技裝置。優(yōu)點為體積小,宏觀結(jié)構(gòu)簡單,耐用、可靠性強,功耗低;缺點為半導(dǎo)體工藝難度太大,材料可選范圍小。
常見的MEMS產(chǎn)品包括MEMS加速度計、微馬達、微泵、微振子、MEMS光學(xué)傳感器、MEMS壓力傳感器、MEMS陀螺儀等以及它們的集成產(chǎn)品。
相控陣(OPA)發(fā)射器由若干發(fā)射接收單元組成陣列,通過改變加載在不同單元的電壓,進而改變不同單元發(fā)射光波特性,實現(xiàn)對每個單元光波的獨立控制,通過調(diào)節(jié)從每個相控單元輻射出的光波之間的相位關(guān)系,在設(shè)定方向上產(chǎn)生互相加強的干涉從而實現(xiàn)高強度光束,而其它方向上從各個單元射出的光波彼此相消。組成相控陣的各相控單元在程序的控制下,可使一束或多束高強度光束的指向按設(shè)計的程序?qū)崿F(xiàn)隨機空域掃描。
固態(tài)OPA激光雷達Quanergy S3
優(yōu)點有:①掃描速度快:一般都可以達到MHz量級以上;②掃描精度或指向精度高:千分之一度量級以上;③可控性好:除對目標區(qū)域進行高密度的掃描外,在其它區(qū)域也能進行稀疏掃描。
缺點有:①制造工藝難度較大:陣列單元尺寸必須不大于半個波長,一般目前激光雷達的工作波長均在1微米左右,陣列單元的尺寸必須不大于500納米;②材料的研究和選擇也是非常關(guān)鍵的因素:到目前為止,鈮酸鋰晶體、PLZT壓電陶瓷、液晶和AlGaAs基波導(dǎo)光學(xué)相控已得到開發(fā)。
泛光面陣式(Flash)是目前全固態(tài)激光雷達中最主流的技術(shù)。成像系統(tǒng)向外發(fā)射光源,發(fā)射出的光源在到達物體表面后,一部分反射回圖像上的像素點。而由于物體表面到返回點的距離不同,其反射光飛行時間(TOF)不同,通過對光飛行時間的測量,每個像素就可獲得獨立的距離信息,其探測范圍可以達到百米以上。攝像頭可以實現(xiàn)百萬像素級別的分辨率快速3D成像。
德國大陸FLASH面陣激光雷達
優(yōu)點為:①純固態(tài)激光雷達:沒有任何機械傳動結(jié)構(gòu);②成像速度快;③成本低:集成度很高,在批量達到一定水平后,成本會很低;④非離散采:改善了感知系統(tǒng)對環(huán)境的空間理解能力。
缺點為:①受限于目前芯片技術(shù)水平,目前還是應(yīng)用在非車輛級別;②掃描距離問題一直是瓶頸,由于是多發(fā)射器同時發(fā)射脈沖激光,因此模塊功率很難升上去;③安裝后只能向固定方向掃描。
現(xiàn)在業(yè)界OPA和MEMS都是比較成熟的激光雷達解決方案,目前它們的角分辨率最好的目前已經(jīng)可以做到0.01°。
本文整理了全球激光雷達主流廠商如下表:
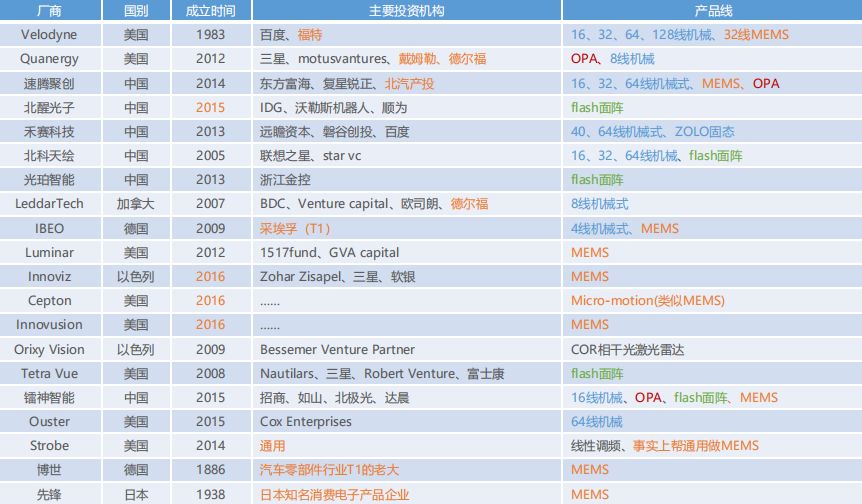
其中做機械式的有9家,做MEMS的有10家,做flash面陣的有5家,做OPA的有3家。
從可靠性、量產(chǎn)難度、量產(chǎn)后成本、工藝成熟度、性能等維度對機械式激光雷達、MEMS激光雷達、OPA激光雷達、Flash激光雷達進行對比如圖。
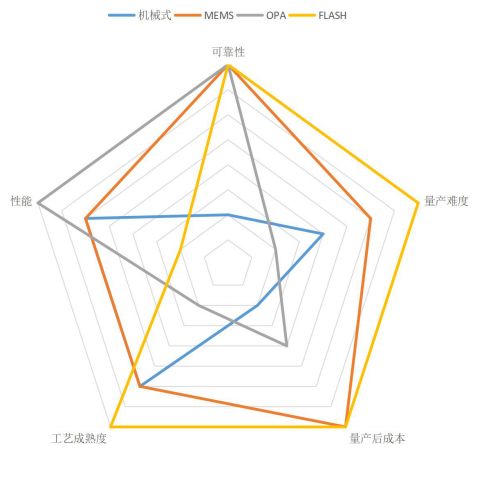
通過上圖可以看出光相控陣OPA理論性能最為強悍,光相控陣OPA功率受限無法滿足距離要求;MEMS性能其次,但量產(chǎn)已經(jīng)具備可能性,MEMS方案一致性和產(chǎn)品壽命始終無法保證;Flash工藝最為成熟,供應(yīng)鏈齊全,F(xiàn)lash系統(tǒng)的輸出能量限制,不可能超越單點測距的系統(tǒng)。
激光雷達產(chǎn)業(yè)構(gòu)成
激光雷達系統(tǒng)復(fù)雜,涉及的核心元器件眾多:光電探測器、激光器、準直鏡頭、掃描鏡、數(shù)模轉(zhuǎn)換器等等。核心元器件目前主要是國外廠商壟斷,國內(nèi)很少有企業(yè)有能力自主量產(chǎn)。

核心元器件廠商
市場概況
近年來,全球汽車的銷售量預(yù)計將僅增長3%,但預(yù)計截至2022年,汽車傳感器出貨量的平均增長率將在未來五年達到8%以上,銷售額增長將超過14%。這主要得益于毫米波雷達、攝像頭以及激光雷達高價值傳感器模塊日益廣泛的應(yīng)用。
2016年,全球汽車MEMS和傳感器市場規(guī)模為110億美元,到2022年預(yù)計可增長至230億美元。
到2022年毫米波雷達、攝像頭以及激光雷達市場預(yù)計將分別增長至77億美元、62億美元和14億美元。
激光雷達行業(yè)發(fā)展趨勢
激光雷達客戶分為測試客戶和整車客戶,二者關(guān)注點不同,測試客戶是目前的主要客戶群體,而整車客戶還需要產(chǎn)品達到車規(guī)級要求,并且自動駕駛民用市場啟動后才能釋放需求。
縱觀全球頂級汽車廠,都有既定的第一批LEVEL 3以上功能量產(chǎn)車下線時間(SOP – Start of Production),從2019-2022不等。
整車廠對成本控制極其嚴格,幾百美金是他們能接受的價格上限。
整車廠要求產(chǎn)品滿足苛刻的車規(guī)認證,只要一條不滿足,整車廠都不會承擔這個風(fēng)險。
由于這些條件的限制,他們往往只能考慮固態(tài)激光雷達
整車廠對激光雷達有何看法?
機械式激光雷達只在造型上就無法接受。工程車可以不用過多考慮外觀而得到應(yīng)用,但乘用車還是會優(yōu)先考慮固態(tài)的激光雷達。
目前機械式雷達的平均的失效時間僅1000-3000小時,難以達到整車廠們的最低要求的13000小時。
相控陣的特性非常突出,但它從概念性產(chǎn)品到工業(yè)級產(chǎn)品,再到可量產(chǎn)化的產(chǎn)品還需要一定的時間。因此目前的觀點是偏向于MEMS激光雷達。
未來基于MEMS的激光雷達,成本可能會在千元左右,可以很好的緩沖傳統(tǒng)機械式雷達的價格昂貴,以及相控陣純固態(tài)LIDAR短時不能落地的尷尬。
FLASH也是一種選擇,但是由于其探測距離的先天不足,目前已經(jīng)不是最優(yōu)選擇。
從國外幾家主要LiDAR企業(yè)的產(chǎn)品路線來看,不難看出,大家發(fā)力點都瞄準在固態(tài),畢竟小型化、低成本、可靠性高是未來自動駕駛領(lǐng)域的趨勢。

全球激光雷達主流廠商融資情況整理
-
激光雷達
+關(guān)注
關(guān)注
967文章
3940瀏覽量
189602 -
自動駕駛
+關(guān)注
關(guān)注
783文章
13687瀏覽量
166152
原文標題:自動駕駛感知神器——激光雷達概述
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
激光雷達在SLAM算法中的應(yīng)用綜述

激光雷達的維護與故障排查技巧
激光雷達技術(shù)的基于深度學(xué)習(xí)的進步
激光雷達技術(shù)的發(fā)展趨勢
禾賽科技持續(xù)領(lǐng)跑全球激光雷達市場
LIDAR激光雷達逆向建模能用到revit當中嗎
光學(xué)雷達和激光雷達的區(qū)別是什么
一文看懂激光雷達

激光雷達芯片技術(shù)發(fā)展 激光雷達在無人駕駛中的應(yīng)用

激光雷達的探測技術(shù)介紹 機載激光雷達發(fā)展歷程

Aeva進行FMCW激光雷達量產(chǎn)爬坡計劃
汽車激光雷達:競爭格局和技術(shù)演進






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論