 CAN總線在工業網絡方面的需求分析
CAN總線在工業網絡方面的需求分析
自1987年出現第一個控制器局域網(CAN)以來,曾經的汽車網絡接口現已擴展到工業應用領域。隨著占用面積的擴大,對總線長度更長,總線節點更多,數據吞吐量更高,電壓隔離度更高的收發器的需求越來越大。
目前有20多家半導體公司提供器件,設計人員有很多決策要做在選擇最佳設備之前,需要充分了解規范的細微差別及其最新迭代。為此,我們將深入研究規范和主題,例如不對稱,然后讓您快速了解一些有趣的CAN設備以及如何充分利用它們。
為什么選擇CAN?
控制器局域網(CAN總線)最早是在20世紀80年代初由Robert Bosch GmbH開發的。第一批CAN控制器芯片于1987年在市場上推出,第一輛實現CAN總線的車輛于1988年上市。在此后的近30年里,CAN總線的使用在全世界的車輛中無處不在,包括公共汽車,火車,飛機和輪船在內的各種運輸方式。
它還廣泛應用于工廠自動化,農業和重型設備,醫療設備,電梯和電梯控制等許多工業環境中。它非常適合作為低成本,低協議開銷,具有錯誤檢測和重傳功能的確定性網絡的許多嵌入式控制應用。
超過20家半導體公司提供支持CAN總線的設備,并且有許多工具供應商以及可用的商業和開源軟件版本 - 從驅動程序到中間件和更高級別的協議棧。
讓我們來看看CAN總線的一些特性,這些特性使它在許多方面都很有用設置。
CAN架構
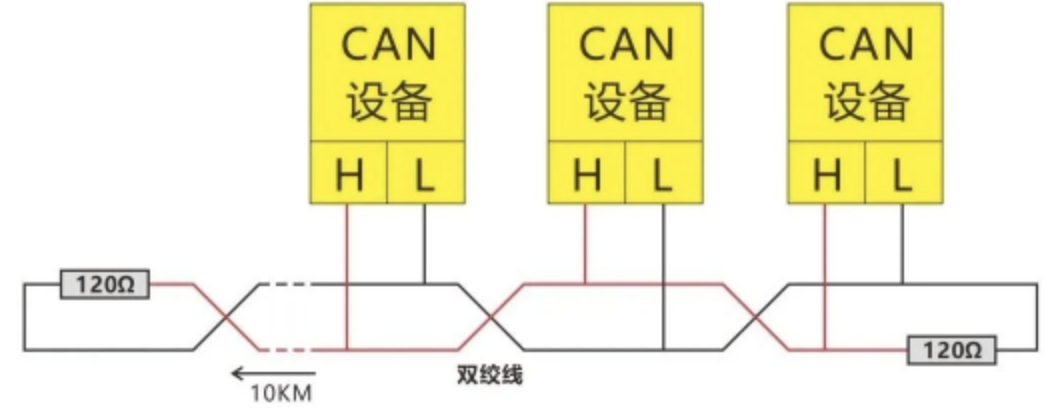
CAN是一種多主串行總線,可連接兩個或多個電子模塊或節點。總線互連(通常)是具有差分信令的雙線雙絞線。 CAN物理層收發器將CAN協議邏輯1和0轉換為總線上的顯性和隱性位,如圖1所示。
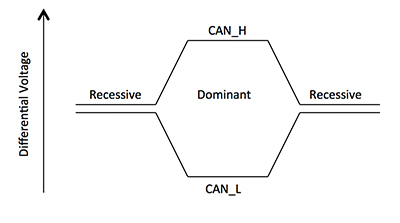
圖1 :CAN總線信令。兩個CAN引腳(CAN_H和CAN_L)形成差分對。通過收發器開漏驅動器將總線驅動到顯性狀態(邏輯0)。在隱性狀態下,線路不被驅動,因此回落到它們的標稱電壓。 (來源:Digi-Key Electronics)
CAN收發器驅動器是一種開漏配置,允許多個驅動器一次性作用于總線而不會發生沖突。總線的自然(未驅動)狀態是隱性狀態(邏輯1)。當節點驅動總線時,隱性狀態將被覆蓋為顯性狀態,這表示邏輯0。
CAN消息傳遞是通過一組稱為幀的比特來完成的。有四種幀類型,但主要類型是數據幀,如圖2所示。

圖2: CAN數據幀的格式。新幀以前一幀的IFS(幀間間隔)之后的SOF(幀開始)開始。 (來源:Digi-Key Electronics)
所有節點都可以嘗試同時傳輸,但一次只允許一條消息在總線上傳輸。這可以通過仲裁字段實現。
在幀起始同步位之后,所有發送節點在仲裁階段發送它們的消息標識符。標識符代表消息的優先級 - 數字越小,優先級越高(記住,顯性位勝過隱性)。最低標識符贏得仲裁。失敗者停止傳輸并將其消息排隊以在下一幀中再次嘗試。
獲勝者繼續發送控制字段(表示要遵循的數據字節數),數據和循環冗余校驗(CRC)位。在確認(ACK)字段期間,接收到沒有錯誤消息的所有接收節點都發送0位。
這種直接幀內響應是CAN的強大功能之一:發送節點立即知道如果他們有一個無差錯的傳輸。然而,這對比特率施加了限制,因為總線總長度的雙向傳播時間不得長于確認主導脈沖。
現在稱為經典CAN網絡的另一個限制是每條消息的數據位數限制為最多8位。當CAN首次引入時,這對于車輛節點是足夠的,但是今天的車輛內部和外部系統通常處理更大的數據尺寸。 8字節限制也會影響總線效率。為了發送64位數據,46個或更多協議位用于仲裁,控制,CRC等。
CAN FD救援
CAN靈活數據,或CAN FD,在2012年推出,以幫助解決古典CAN的一些局限性。 CAN FD允許以兩種不同的比特率傳輸CAN數據幀:仲裁,控制和確認的速率較慢,字段以及數據字段的速率更快。
由于確認包含在數據字段比特率較慢的速率可以更高,因為它不受總線上的雙向支持延遲的影響,只有發送器和接收器延遲和總線特性限制了數據速率。該方法還允許與現有CAN控制器向后兼容。此外,CAN FD數據幀支持多達64字節的數據以及額外的CRC位,即使數據字段較長,也可保持漢明距離為6。
CAN收發器規范在ISO 11898-2中有詳細說明。該文檔的最新版本為收發器的發送器和接收器部分添加了prop延遲規范,并將總環路延遲(TXD至RXD)定義為小于255 ns。由于CAN驅動器不是推挽式,因此發送器和接收器延遲對于顯性到隱性和隱性到顯性轉換是不對稱的。
ISO 11898-2現在規定了最大不對稱性延遲,以及收發器內部循環時間。這很重要,因為不對稱會導致隱性位縮短,這成為數據速率的限制因素。為了正確設計網絡,需要知道不對稱限制。
ISO 11898-2發送器延遲不對稱規范定義為驅動60Ω,100 pF總線負載時產生的隱性位寬,如表1所示。
數據相位比特率位標稱寬度總線隱性Min Buss隱性最大值2 Mbit/s 500 ns 370 ns 570 ns 5 Mbit/s 200 ns 110 ns 225 ns
表1:發送器驅動60Ω100pF總線負載時指定延遲。 (來源:ISO 11898-2)
接收機延遲不對稱性,表示為與標稱位時間的偏差,如表2所示。
數據相位比特率最小偏離正常最大偏差從正常2 Mbit/s -65 ns 40 ns 5 Mbit/s -45 ns 15 ns
表2:接收器延遲不對稱性表示為與標稱位時間的偏差。 (來自ISO 11898-2的數字)
將最小和最大偏差添加到標稱值會給出最壞情況的最小和最大隱性位寬(不包括其他網絡因素,如振鈴),如表所示3。
數據相位比特率位標稱寬度總線隱性最小總線隱性最大最小偏離正常最大偏離正常2 Mbit/s 500 ns 435 ns 530 ns -65 ns 30 ns 5 Mbit/s 200 ns 155 ns 210 ns -45 ns 10 ns
表3:最壞情況的最小和最大隱性位寬度是通過添加最小和最大偏差得出的。 (來自ISO 11898-2的數字)
請注意,為5 Mbit/s數據速率指定的不對稱性比2 Mbit/s更嚴格。高數據速率收發器可用于低數據速率網絡以利用這一點。
單個CAN收發器中的環路延遲不對稱通常小于上面顯示的最壞情況計算并且在CAN FD收發器中規定了它們支持的數據比特率。
支持更高數據速率的CAN FD收發器現在已經上市。 Microchip Technology的MCP2542FD就是一個例子,見圖3.
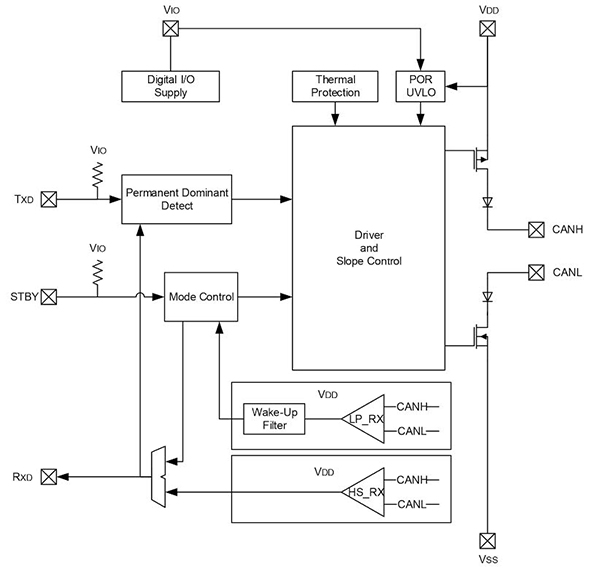
圖3:Microchip的MCP2542FD CANFD收發器支持高達8 Mbits/s的傳輸,具有改進的支路延遲和環路延遲不對稱性。 (來源:Microchip Technology)
其收發器環路延遲(TXD輸入轉換到RXD輸出)為120 ns,而ISO 11989-2規范為255 ns。環路延遲不對稱性(取自數據手冊)也有所改進,如表4所示。
數據相位比特率位標稱寬度總線隱性最小總線隱性最大值2 Mbit/s 500 ns 450 ms 550 ms 5 Mbit/s 200 ns 160 ms 220 ms 8 Mbit/s 200 ns 85 ns 140 ns
表4:MCP2542FD收發器數據表中的環路延遲不對稱性。 (來源:Microchip Technology)
目前沒有針對8 Mbit/s收發器的ISO 11989-2規范,但通過預測需求,MCP2564FD可在較低的比特率下提供更高的性能。它還具有非常低(4μA)的待機電流和喚醒總線活動。根據ISO 11898-2規范,還有一個支持CAN總線喚醒模式(WUP)的版本。
工業用途的含義
CAN FD規范的主要驅動程序是為了在汽車裝配線末端以更快的速度支持更大的數據有效載荷。使用Classic CAN,可能需要幾個小時才能以500 kbit/s的速度運行。通過使用CAN FD提供的32字節數據有效載荷,僅通過擴展有效載荷并將數據速率提高到2 Mbit/s就可以實現4倍的改進。使用64字節有效載荷和5 Mbit/s,可以提高10倍以上的帶寬。
由于相當于8個經典CAN數據幀可以與一個CAN FD幀一起發送,因此協議開銷是顯著減少。這種總線效率的提高在工業環境中非常有用,特別是如果由于長總線而導致數據速率較低。利用較少的開銷比特,可以以較慢的數據速率傳輸更多數據,并且仍然保持延遲要求。
CAN FD更大數據量的另一個優勢是改善了對數據一致性的支持。這方面的一個例子是在多軸運動控制器中,其中必須具有控制器位置的時間同步視圖。這些數據集大于可在一個經典CAN幀上傳輸的數據集,但適合CAN FD幀。將這些數據組合成一個消息傳輸的總線效率再次提高是另一個好處。
ISO 11898標準規定最大電纜長度為40米,最大存根長度為0.3米,最大節點為30個節點。 1 Mbit/s仲裁階段比特率。這適用于汽車應用,但這些限制并不適合許多工業用例。幸運的是,可以通過仔細的網絡設計來調整總線速度,總線長度,線纜大小和節點數量。
CAN in Automation(CiA)等行業組織發布了擴展網絡配置的規范和建議。例如,CiA 102 CAN工業應用物理層文檔推薦以下標準比特率,如表5所示。
比特率標稱比特時間1 Mbit/s1μs800kbit/s1.25μs500kbit/s 2μs250kbit/s4μs125kbit/s8μs50kbit/s20μs20kbit/s50μs10kbit/s100μs
表5:工業應用的推薦仲裁相位比特率。總線上的所有節點必須以相同的數據速率運行。 (來源:CAN in Automation)
此外,CiA 303為少于64個節點的網絡提供標準DC參數的建議,如表6所示.CiA還為更大的節點網絡提供建議。
總線長度[m]總線電纜 1 終端電阻[Ω]比特率[kbit/s]長度相關電阻[mΩ/m]橫截面[mm2] 0到40 70 0.25到0.34 124 1000 40 m 40到300 < 60 0.34至0.6 150至300 100 500 m 600至1000 <26 0.75至0.8 150至300> 50 at 1 km
表圖6:針對64個節點的網絡的標準DC參數的CiA 303建議。 (來源:CAN in Automation)
推薦電纜交流參數:120Ω阻抗和5 ns/m特定線路延遲
表2:建議總線電纜參數,終端電阻和擴展總線長度的最大比特率。
CAN FD收發器(如MCP2564FD)是更長總線長度的理想選擇,因為它們改善了傳播延遲和環路延遲對稱性,可提供額外的總線余量
另一款具有工業優勢的CAN FD收發器是德州儀器的TCAN337G單收發器(圖4)。
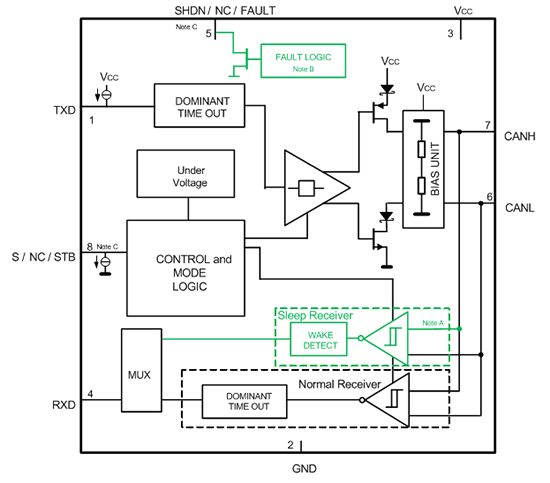
圖4:德州儀器(TI)的TCAN337G功能框圖。其增強的驅動器和接收器規格使其適用于具有大量節點的CAN網絡。 (德州儀器公司提供)
TCAN337G符合ISO 11989-2規范的2 Mbit/s和5 Mbit/s數據速率,但具有改進的驅動程序規范,可以滿足最小差分總線具有50Ω負載而非標稱60Ω負載的電壓。最小差分輸入電阻為30kΩ,是大多數收發器的三倍。這些改進的最終結果是,如果所有收發器都是TCAN337G器件,則可以在網絡上放置多達120個節點,耦合電阻為330Ω(長達1000米)。
TCAN337G還具有故障引腳,可報告TXD和RXD主導超時故障,熱關斷和低壓鎖定條件,使其對高可靠性系統非常有用。該器件還可以在低功耗狀態下進入休眠狀態,并支持ISO 11898 CAN總線喚醒模式(WUP)。
電動或混合動力汽車中的高壓系統,發電或能量存儲系統需要電隔離網絡以防止電擊危險。這通常通過光學隔離器完成。但是,通過這些隔離器的延遲時間會增加收發器的環路延遲,使其不適合CAN FD應用。恩智浦的TJA1052i采用新型電容隔離技術解決了這一問題,該技術可提供高達5 kV(RMS)的隔離,見圖5.
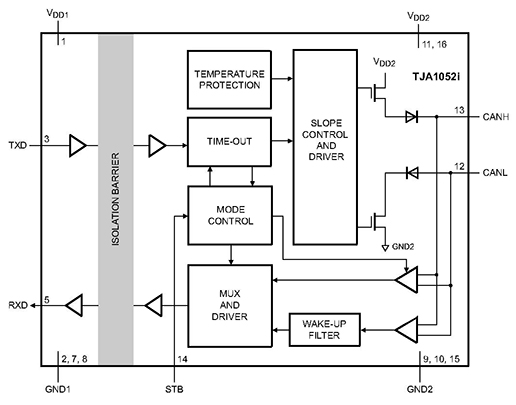
圖5:對于高壓系統,恩智浦的TJA1052i CAN FD收發器采用電容電流隔離,可實現5 kV短路隔離延遲時間以支持CAN FD數據速率。 (由NXP Semiconductors提供)
隔離位于RXD和TXD引腳與電路的其余部分之間。在屏障的輸入信號側(例如TXD引腳),如果輸入信號為1(或隱性),則啟用RF振蕩器。然后,該信號在屏障上電容耦合,由RF解調器接收。解調信號的存在表示隱性狀態;沒有射頻能量是主導狀態。除了RF振蕩器和解調器位于屏障的相對側之外,該方案對于RXD以相同的方式工作。這種隔離方法增加了非常小的延遲,使TJA1052i能夠支持2 Mbits/s和5 Mbits/s的CAN FD速率。
電流隔離收發器還可以改善嘈雜環境中的CAN信號完整性。高逆變器開關電流會引起大的接地噪聲,這些噪聲可能會耦合到信號線上并破壞數據傳輸。隔離這些信號消除了消息損壞的根源,可以顯著提高噪聲系統的吞吐量。
結論
自首批產品出現以來,CAN總線不斷發展以滿足新的要求。通過CAN FD,組件制造商不斷創新,以便為具有更高性能要求的特定應用優化網絡。有超過20個供應商家族可供選擇并得到廣泛而強大的工具鏈的支持,CAN定位于現在和將來支持工業網絡需求。
-
控制器
+關注
關注
112文章
15878瀏覽量
175336 -
CAN總線
+關注
關注
145文章
1898瀏覽量
130333 -
局域網
+關注
關注
5文章
719瀏覽量
46134
發布評論請先 登錄
相關推薦
CAN FD如何滿足工業設備對高效數據通信的需求?
CAN總線和EtherCAT的區別
什么情況會造成can總線關閉
can總線中繼器連接方法
can總線中斷狀態什么意思呢?
動力can總線系統由哪些部分組成
如何使用示波器檢測CAN總線上的信號
什么是CAN總線協議?它有哪些特性和應用?
can轉profinet網關實現汽車生產的革新
什么是終端電阻?CAN總線的終端電阻具體作用是什么呢?
CAN轉ETHERCAT網關將CAN 總線和 ETHERCAT 網絡連接方法






 工商網監
工商網監
評論