 應用于磁場定向控制電機設計的固件堆棧
應用于磁場定向控制電機設計的固件堆棧
永磁同步電機(PMSM)在要求苛刻的電機控制應用中,在效率,響應性和生命周期成本方面具有顯著優勢。與傳統的刷式電機不同,PMSM是電子換向電機(ECM),需要高集成度微控制器,能夠執行復雜的磁場定向控制(FOC)算法,并提供實現最大扭矩所需的精確電機控制信號。
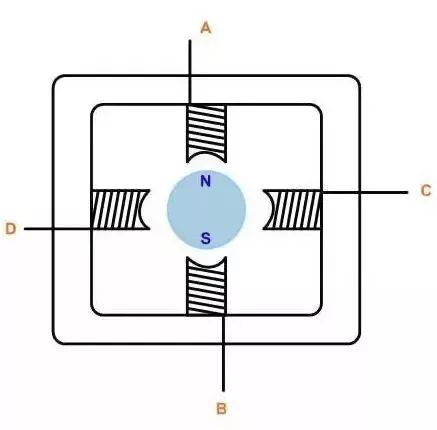
通過利用合適的電機控制軟件庫,工程師可以使用包括飛思卡爾半導體,Microchip技術,恩智浦半導體,意法半導體和德州儀器等領先MCU供應商的專用MCU版本,更輕松地利用FOC PMSM的優勢。 》在PMSM中,在多個定子繞組中連續產生的磁場使永磁轉子旋轉。通過在每個定子繞組產生的磁場和轉子中的永磁體之間保持90°相位,電子換向控制邏輯可以在電動機中實現最大扭矩。 FOC,也稱為矢量控制,通過在低速下提供高扭矩并快速響應動態變化的負載(例如洗衣機中的負載),提供了一種保持定子和轉子之間最佳相位關系的方法。
FOC方法
FOC通過正弦波連續換向PMSM,以提供高扭矩,扭矩波動小。因此,FOC驅動的PMSM運行時機械振蕩減少,優于梯形甚至正弦波驅動的無刷直流(BLDC)電機,從而使設備更安靜。此外,由于使用永久磁鐵,FOC驅動的PMSM非常高效,隨著能源成本持續攀升,它們越來越具有吸引力 - 根據美國能源部的數據,廚房和洗衣設備約占家庭用電量的三分之一消費。同時,用于確定轉子位置的無傳感器方法的可用性進一步降低了部件和生命周期成本。這為PMSM應用在更苛刻的壓縮機和泵設計中打開了大門,例如家用,商用和汽車應用,其中傳感器不易使用。
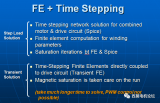
FOC實施需要大量的處理需求,需要結合芯片特定的固件架構。電機控制專用軟件庫,相應的強大處理能力和適當的集成外設功能(見圖1)。通常,所需的片上外設功能包括多通道脈沖寬度調制信號輸出,具有死區時間以避免電機控制功率級中的直通電流,高速,高分辨率模數轉換器(ADC)具有精確觸發功能,可在最小的MCU負載下精確測量三相電流,并可在發生機械故障時快速關閉電機故障處理。
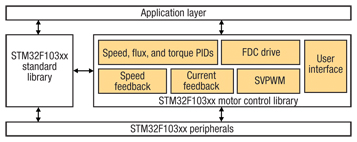
圖1:在此代表中用于面向磁場的控制架構的固件棧,片上外設補充了由器件MCU執行的軟件程序。
單個MCU產品通過專為更廣泛的應用要求和更高性能而設計的專用功能增強了這些基本電機控制功能。例如,飛思卡爾的Cortex-M4 K10 Kinetis MCU提供專用的信號處理功能,如桶形移位器以及并行化功能,如單周期,單指令/多數據(SIMD)和單周期乘法器累加器(MAC) )。 Microchip的dsPIC33F 16位電機控制系列通過其片上40-MIPS數字信號控制器內核實現了所需的性能。恩智浦LPC17xx和LPC32x0分別將專用電機控制PWM與ARM 32位Cortex-M3和16/32位ARM9內核相結合。在每種情況下,MCU供應商都將專用的片上硬件與專用軟件庫相結合,以滿足電機控制要求,例如基于FOC的設計。
FOC算法
FOC算法通過采用三相電機提供PMSM優勢通過一系列變換發出信號,這些變換旨在將定子測量的三相時變電機電流轉換為更簡單的兩相,時不變,以轉子為中心的參考,可以更容易地進行操作(參見圖2) 。結果
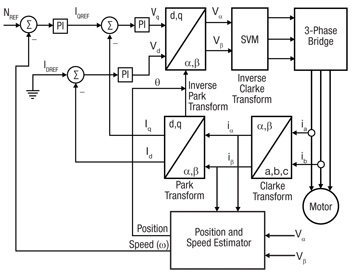
圖2:磁場定向控制算法使用一系列信號變換來實現永磁同步電機的電子換向。
在FOC算法的初始輸入階段,MCU使用Clarke變換將三相(IA,IB,IC)電流矢量投影到兩相(Iα,Iβ)矢量空間,該矢量空間仍以定子為參考。然后,MCU應用Park變換將定子參考的Iα,Iβ矢量以角度Φ旋轉到新的雙軸坐標系,其中單獨的磁通(Id)和扭矩(Iq)分量與旋轉器對齊。由于這個新的坐標系相對于轉子保持固定,因此它在參考平面上是時不變的。
將定子磁場矢量與轉子坐標系對齊所需的旋轉角Φ當然取決于轉子位置,傳統上通過連接在電機軸上的傳感器測量。如上所述,額外的傳感器增加了BOM成本并降低了電機系統的壽命,激發了人們對無傳感器方法的興趣增加,這種方法通過利用其與反電動勢的已知關系來計算轉子位置。然而,與梯形電機不同,FOC設計中的反電動勢必須使用虛擬電機模型進行估算,因為所有相都參與換向。因此,無傳感器FOC設計會產生額外的處理負載,并要求MCU能夠快速返回通過表查找,浮點算法或整數方法(如使用桶形移位器的CORDIC算法)計算出的三角函數的結果。
通過移動三個 - 相位,時變矢量空間到兩軸時不變矢量空間,FOC算法允許工程師應用直流電機中使用的傳統比例 - 積分 - 微分(PID)控制器來計算新的目標電壓Vd和Vq。實際上,電機速度變化的慢響應時間意味著在這些控制器中通常不需要D項。注意,在轉子中使用永磁體意味著沒有滑動,因為轉子產生的轉子磁通以與轉子磁場相同的速度旋轉。因此,圖2中所示的參考通量IDREF為零;通過校準設置轉矩參考值Iqref以滿足所需的性能目標。
MCU通過逆向停車變換傳遞PI控制器的輸出,將轉子參考的Vd,Vq值轉換為定子參考值。然后,MCU通過反向Clarke變換傳遞這些結果,以產生所需的三相電壓矢量,然后將其轉換為脈沖寬度調制(PWM)信號,并傳送到直接驅動PMSM的三相功率級。 br》電機控制MCU供應商通過廣泛的軟件庫簡化了基于FOC的設計的固件開發。例如,STMicroelectronics將其STM32F103xx系列MCU與用C語言編寫的完整PMSM FOC庫配對。同樣,TI的TMS320C2代碼庫包括用于Park和Clarke變換的優化C庫,能夠在短至125個周期內完成Park變換。 》這一系列的變換和控制功能帶來了大量的處理負荷,這在無傳感器設計中進一步惡化。無傳感器FOC邏輯需要包括特殊的初始化和啟動程序,以解決靜止電機中缺少可觀察的電流測量問題(參見圖3)。 FOC啟動程序通常應用預設的正弦波模式,使電機運行到基于MCU的控制系統切換到無動態無傳感器測量所需的足夠速度。
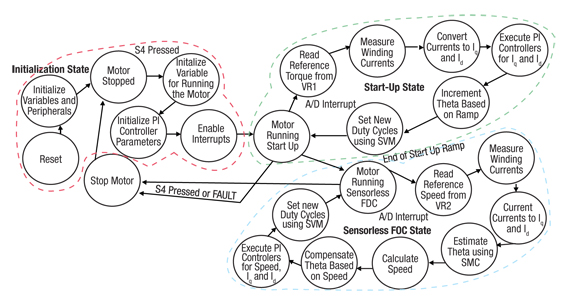
圖3:點擊啟動或復位基于無傳感器FOC PMSM的白色物品應用程序上的按鈕將電機控制系統置于專用狀態,以便將電機正確旋轉到足夠的速度,以便安全地轉換到無傳感器狀態。
-
半導體
+關注
關注
334文章
27064瀏覽量
216504 -
控制器
+關注
關注
112文章
16214瀏覽量
177485 -
電機
+關注
關注
142文章
8940瀏覽量
145144
發布評論請先 登錄
相關推薦
其利天下技術·FOC控制和方波控制的區別?分別應用場景是什么?無刷電機驅動方案

FOC電機驅動技術解析 FOC電機使用注意事項
FOC電機與傳統電機的區別
使用TMS320C25 DSP實現交流電機的磁場定向控制

步進電機如何進行矢量控制與神經網絡控制?
使用TI智能柵極驅動器輕松實現無刷直流(BLDC)電機的磁場定向控制(FOC)
音圈電機是脈沖控制嗎
基于時步有限元的電機設計以及案例





 工商網監
工商網監
評論