 BLDC和PMSM電機的構造及驅動方案介紹
BLDC和PMSM電機的構造及驅動方案介紹
無刷直流(BLDC)和永磁同步電機(PMSM)現在在許多應用中受到青睞,但運行它們的控制軟件可能難以實現。恩智浦的Kinetis電機套件彌補了與嵌入式控制軟件和直觀GUI的差距,最大限度地降低了軟件的復雜性并加快了開發過程。
本文將簡要介紹BLDC和PMSM電機的構造和關鍵操作參數,然后介紹如何驅動它們。然后,它將討論軟件為何復雜,如何管理以及一些硬件選項。然后,它將研究如何使用恩智浦的Kinetis電機套件啟動和運行項目。
三相無刷直流電機(BLDC)及其近似同類電機,永磁同步電機(PMSM)已成為在過去十年中,由于其控制電子設備的成本急劇下降,新的控制算法激增,因此在過去的十年中,工業領域也越來BLDC電機具有高可靠性,高效率和高功率體積比。它們可以高速運行(大于10,000 rpm),具有低轉子慣量,允許快速加速,減速和快速反向,并具有高功率密度,將大量扭矩包裝成緊湊的尺寸。今天,它們被用于任何數量的應用,包括風扇,泵,真空吸塵器,四軸轉換器和醫療設備,僅舉幾例。
PMSM與帶有繞線定子和永磁轉子的BLDC具有相似的結構,但定子結構和繞組更類似于AC感應電機,在氣隙中產生正弦磁通密度。 PMSM與施加的三相交流電壓同步運行,并且具有比交流感應電動機更高的功率密度,因為沒有定子功率用于感應轉子中的磁場。今天的設計也更強大,同時具有更低的質量和慣性矩,使其對工業驅動,牽引應用和電器具有吸引力。
創造驅動器
鑒于這些優勢,它不是不知道這些電機是如此受歡迎。然而,沒有任何東西沒有價格,在這種情況下,驅動和控制電路的復雜性。消除換向電刷(及其伴隨的可靠性問題)使得需要電氣換向以產生定子旋轉場。這需要一個功率級(圖1)。

圖1:三相電機驅動的簡化框圖。三個半橋在控制器的指導下切換電機相電流,其輸出由前置驅動器放大和電平移位。 (使用Digi-Key方案繪制的圖表 - 它)
星形連接的電機相連接到三個半橋驅動電路。這些使用功率FET來切換總線功率以激勵繞組,但是也可以使用其他類型的功率器件,例如IGBT。 FET由預驅動器級驅動,該級驅動器級電平移位并放大來自電機控制器的相位輸入,電機控制器可以是MCU,DSP,FPGA狀態機或其他一些可編程控制器。使用來自電機的反饋(圖1中未顯示),控制器對橋式FET進行排序以產生旋轉磁場,從而拉動轉子。
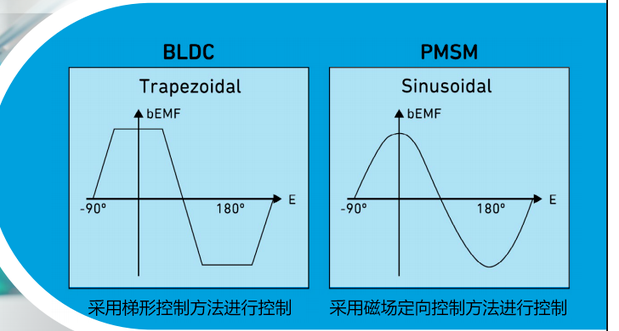
有兩種常見的波形用于實現此目的。第一種是六步梯形驅動器,其中360度電旋轉分成60度的步進。第二種是正弦驅動,其中偏移120度的PWM正弦電壓波形在電機相位中被驅動。梯形控制通常與BLDC電機一起使用,因為它更容易實現。正弦波控制可提供更高的電機效率和更小的紋波,并可與BLDC電機和PMSM一起使用。
圖1所示的電路可以通過多種方式實現。對于風扇控制等低功耗,單功能應用,所有模塊都可以集成到一個芯片中。對于醫療設備等更復雜的應用,可以將預驅動器和功率FET集成到一個IC中。控制器是單獨實現的,因此它可以處理應用程序中的其他功能。對于大功率工業或電動車輛驅動器,控制器,預驅動器和功率級都是分開的。在電機和驅動器的高總線電壓與控制器的低壓信號之間增加了電流隔離。
控制電流
由于電流需要調整到在變化的負載下控制速度,必須采用反饋控制機制。這是它變得復雜的地方。為了獲得具有良好動態扭矩響應的良好速度控制,在正弦驅動中采用稱為矢量控制(也稱為磁場定向控制或FOC)的技術。
FOC的詳細信息超出了本文的范圍。本質上,使用矩陣運算測量定子相電流,然后從三維轉換為二維坐標空間。得到的2D矢量表示電動機磁鏈和電動機轉矩。通常,然后使用比例積分(PI)控制器來調整這些2D電流分量以匹配外部速度控制環路(由另一個PI控制器確定)的需要,然后再轉換回3D相量電流以應用于6步驅動。
為了使控制方程起作用,需要確定電機轉子的位置。除了在電機中嵌入真正的軸編碼器外,還有兩個主要選擇:使用霍爾效應傳感器,稱為傳感器控制;或檢測電機的反電動勢(電動勢),稱為無傳感器控制。無傳感器由于成本較低而成為最常見的,但兩者都需要電機轉動才能感應真實位置。在這種情況下,電機啟動可能會非常棘手,因為它需要以開環模式啟動,直到確定電機位置。
控制軟件開發完成后,需要調整控制系統。必須調整PI控制器的參數以匹配電機類型,負載變化和其他潛在的干擾因素。這些參數控制控制器的階躍響應和帶寬。如果它們設置得太低,電機響應會滯后。如果它們設置得太高,控制器可能會振蕩并變得不穩定。編寫和調試控制軟件后,通常需要數月的測試和調整才能在所有條件下獲得所需的響應。
管理軟件復雜性
這些控制方程所涉及的數學復雜性使得計算平臺需要增強的數學或DSP指令。它還需要具有快速的模數(A/D)轉換功能來測量電機電流,以及專門的定時器模塊,以產生精確對準的PWM信號。將這些功能卸載到DSP或其他專用處理器,可以釋放CPU以執行其他應用程序任務。
幸運的是,目前市場上出現了專門針對FOC電機控制的低成本MCU。例如,恩智浦提供一系列基于ARM?Cortex?-M的電機控制設備,稱為Kinetis V系列(圖2)。
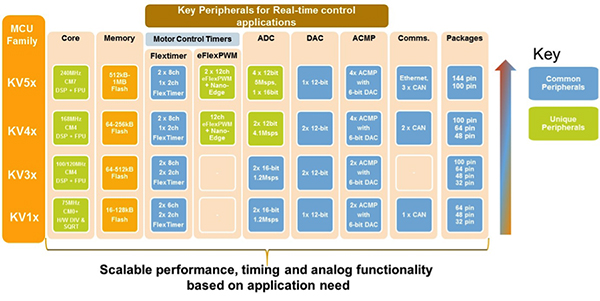
圖2:恩智浦Kinetis V系列基于ARM Cortex-M的MCU具有高性能內核,電機控制定時器,快速A/D轉換器以及各種存儲器和封裝尺寸。 (圖像來源:NXP)
Kinetis V系列可擴展核心功能,存儲器大小,定時器和A/D轉換器通道,數模轉換器(D/A)和比較器。這樣可以在低端優化實現簡單的BLDC速度控制,一直到高端設備的多個PMSM。 KV1x MCU系列中的Cortex-M0 +內核增加了硬件平方根和除法功能。這使得Kinetis KV1x器件適用于負載相對恒定且控制環路頻率低于12 KHz的BLDC和PMSM電機。
Kinetis KV3x和KV4x MCU系列使用支持DSP的Cortex-M4內核函數和浮點數學。這些器件可支持更高動態負載應用,控制環路高達20 KHz,并提供極高性能的解決方案。 Kinetis KV5x MCU系列具有Cortex-M7內核以及以太網連接和安全IP。
FlexTimer和eFlexPWM定時器支持死區時間插入,以消除當相位關閉時的電流射擊,以及其他電機專用功能。 FlexTimer每個定時器模塊具有單個時基,而eFlexPWM每個PWM模塊最多可支持四個時基,為高級電機控制算法的PWM生成和同步提供了極大的靈活性。
A/D模塊可同時捕獲和處理兩個信號,這對于無傳感器控制非常重要。采樣頻率在高端設備上增加。所有器件還具有一個或多個12位D/A和相應數量的比較器,相對于PWM通道的數量,具有6位參考D/A轉換器。
電機控制優化處理器是等式的一部分,但仍然存在開發FOC軟件的問題,FOC軟件過去需要在電機管理和控制理論方面具有深厚的專業知識。然而,由于恩智浦提供了一種新的免費工具--Kinetis Motor Suite(KMS),現在已經減少了這一障礙。
KMS是一種硬件和軟件解決方案,包含專有的FOC電機控制IP。選定的Kinetis V系列MCU上的受保護閃存和一個簡單易用的GUI,用于設置和調整電機系統。 KMS消除了對電機控制的深入了解的需要,允許那些專業知識有限的人開發應用程序,然后將其與其他應用軟件嵌入。 KMS可以在短短30分鐘內運行并調整電機。
KMS入門
以下是如何開始開發自己的電機控制解決方案。最簡單的方法是購買FRDM-V31F Freedom開發平臺和相應的高壓或低壓平臺驅動板。在這種情況下,我們將使用FRDM-MC-LVPMSM Freedom評估板。如果您是塔式系統開發板用戶,則該平臺還有適用的處理器和驅動板。
為此,您需要添加電機和適當的電源電壓直流電源。如果你沒有電機,一個很好的選擇是FRDM-MC-LVMTR-ND,這是恩智浦用于Freedom Development Kit的24 V,3相BLDC電機。
FRDM-V31F板上有MKV31F128VLH10P微控制器。這包含嵌入式KMS IP。請注意,只有帶有“P”后綴的Kinetis微控制器包含KMS IP。
獲得主板后,就可以從Kinetis Motor Suite入門頁面獲取軟件工具,其中有鏈接可下載您需要的三種工具,包括:
Kinetis軟件開發套件(KSDK)
Kinetis設計工作室(KDS)集成開發環境(IDE)
Kinetis電機套件。
現在是時候組裝硬件了。通過將三相FRDM-MC-LVPMSM板插入FRDM-KV31F板并將FRDM-MC-LVPMSM板置于頂部,將兩塊Freedom板連接在一起。將電機的三相端子連接到FRDM-MC-LVPMSM板,并通過電源輸入插孔連接電機電壓。在計算機和FRDM-KV31F之間連接USB-mini-USB線。微控制器板上的綠色電源LED應亮起,同一板上的RGB LED應閃爍。您現在可以進行電機測量并旋轉電機。
啟動Kinetis Motor Suite并選擇一個新項目。它將要求您識別您的硬件平臺(Freedom,High Voltage或Tower系統),控制類型(Sensored Position,無傳感器速度或感應速度)和開發環境(IAR或Kinetis Design Studio IDE。)
在為項目命名并選擇COM端口后,系統會要求您輸入電機的基本信息。您需要知道電機的額定速度,額定RMS電流,額定電壓和極對數(圖3)。

圖3: KMS屏幕輸入電機信息。顯示的值適用于FRDM-MC-LVMTR板。嵌入式控制算法使用這些值來控制電機。 (圖像來源:恩智浦)
一旦輸入,KMS將激活并旋轉電機以測量其電氣特性 - 定子電阻,定子電感和定子磁通(圖4)。稍后需要這些來調整電機控制參數。在此步驟中確保電機與負載斷開連接。
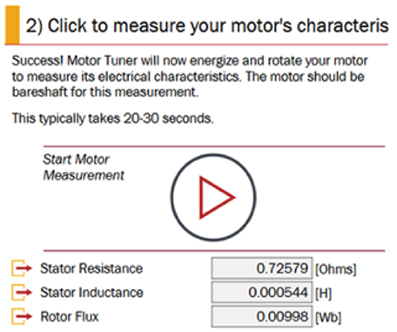
圖4:KMS屏幕,用于測量電機電氣特性。 KMS在測量和旋轉電機時更新這些值。 (圖片來源:恩智浦)
接下來,KMS將通過快速旋轉電機來測量系統的機械慣性。這應該是裸軸或連接到其他系統機械部件,如齒輪或皮帶,而不是動態負載。
KMS現在擁有以額定速度運行電機所需的所有信息。只需單擊鼠標即可開始測試,KMS將打開一個軟件示波器,向您顯示電機啟動,從開環控制到閉環控制的轉換,然后升至額定速度(圖5)。
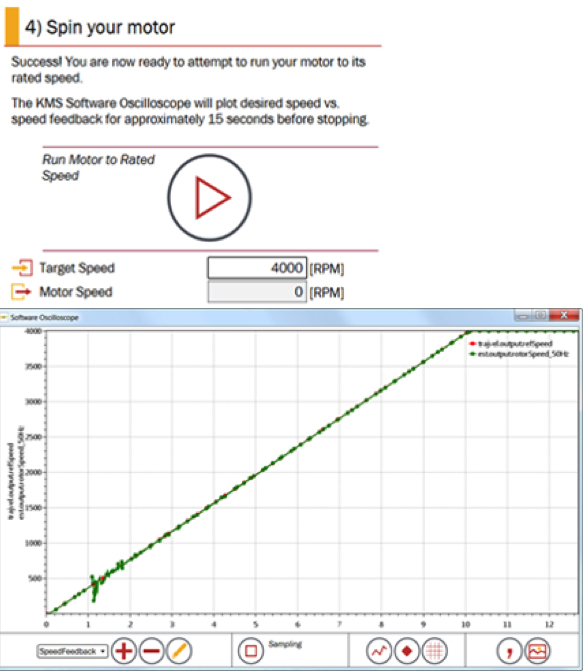
圖5:KMS啟動電機并斜坡上升到額定速度,同時在速度/時間圖表上顯示RPM。 (圖像來源:NXP)
通過執行這四個步驟,KMS確定了必要的參數并編程了控制回路以使電機運行,而無需編寫一行控制代碼。
調高
但是,我們還沒有調整電機。 KMS還通過使用自抗擾控制(ADRC)來幫助完成這項經常困難的任務。這是Linestream Technologies的SpinTAC?控制系統的一部分,嵌入在KMS中。 ADRC取代了KMS中的比例積分微分(PID)控制,并使用設置步驟中的電機特性和系統慣量來調節控制器。用戶只需要設置一個參數:帶寬。這需要兩個步驟來調整電機。
第一步是以最小速度運行電機,并使用KMS速度控制器設置產生穩定速度的最大帶寬(圖6)。
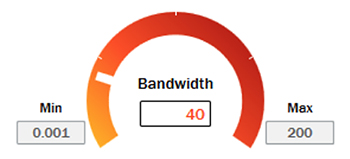
圖6:KMS速度控制器輸入。單擊帶寬弧將設置新值。 (圖像來源:NXP)
然后以最大速度運行電機并根據需要調低帶寬,以獲得穩定的操作。電機現已調整。
使用ADRC進行調整不僅可以調整電機和慣量參數,還可以解決非理想情況下的其他干擾,例如負載變化,軸承磨損和摩擦變化。這樣做是因為它主動估計這些干擾并實時補償它們,并且ADRC的性能優于PI控制器。這顯示在圖7和8中。
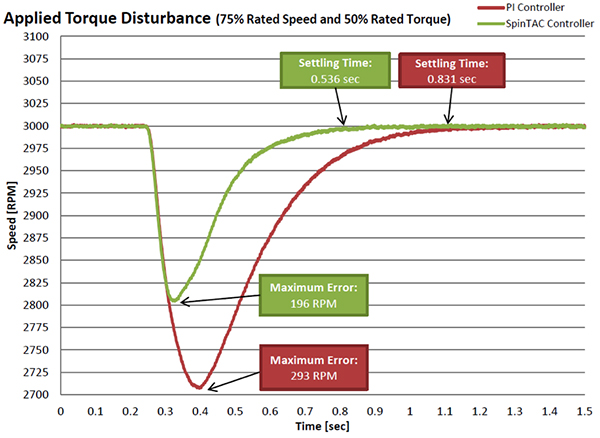
圖7:應用扭矩干擾的PI控制器與SpinTAC控制器的性能比較。與PI控制器相比,SpinTAC控制器具有更少的誤差和更快的建立時間。
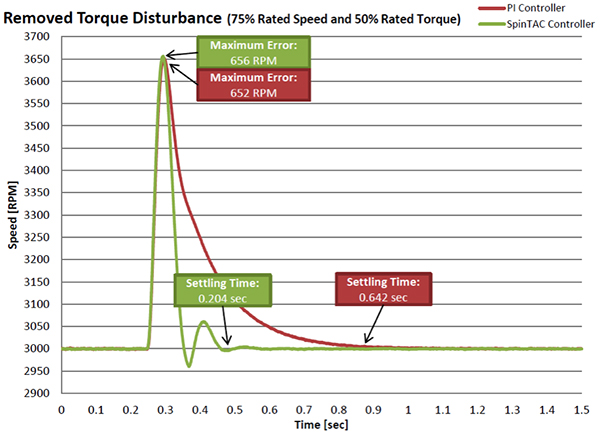
圖8:PI控制器與SpinTAC控制器的性能比較,用于去除扭矩騷亂。 SpinTAC控制器具有與PI控制器相同的誤差和更快的建立時間。
這些數據顯示PI和SpinTAC控制器對額定速度為75%的電機上的50%轉矩增加和移除的響應。 SpinTAC控制器的初始控制器錯誤更好或相同,并且建立時間比PI控制器更快。 ADRC的自適應特性改善了控制器干擾范圍內的標準PI控制器,無需進一步調整或運行時調整。
后續步驟
有了它。您的電機正在運行和調整,無需編寫一行代碼。但是,我們剛剛觸及了KMS的功能表面。它可用于編程運動序列,調整啟動參數,執行扭矩控制,提供制動和保護功能,并為您的應用微調許多參數。
當然,要構建您的最終產品,您需要調整KMS固件并將其轉換為最終硬件配置,并將其嵌入應用程序固件中。恩智浦提供了一個全面的應用筆記,用于轉換為您的自定義硬件以及完整的API參考手冊。您可以繼續使用KMS中的工具來調整和微調您的應用程序,直到產品發布和調試。
結論
BLDC和PMSM是具有許多應用的主力電機,但它們通常需要仔細注意位置感應,驅動電路和控制軟件。恩智浦通過引入KMS簡化了開發電機驅動應用的任務。使用這種硬件和軟件解決方案,您不一定需要了解電機驅動和控制的所有細節,因此即使專業知識有限,您也可以在短短30分鐘內運行電機并進行調諧。
-
控制器
+關注
關注
112文章
16214瀏覽量
177479 -
恩智浦
+關注
關注
14文章
5830瀏覽量
106746 -
電機
+關注
關注
142文章
8940瀏覽量
145136
發布評論請先 登錄
相關推薦
STM32F1-MCD-IPM30 2.2KW BLDC PMSM FOC正弦波控制雙電機同步控制電機套件方案
無刷電機小知識:BLDC與PMSM的區別
PMSM的基本的構造是什么
PMSM的基本構造是什么
一文了解BLDC與PMSM的區別
無刷電機BLDC與PMSM的區別詳解
TRINAMIC高功率BLDC/PMSM柵極驅動器,兼具與電機完美匹配的高電流曲線
Trinamic推基于PMSM伺服或BLDC電機的高功率柵極驅動器—TMC6200
了解BLDC和PMSM類型的電機
采用高性能微控制器的三相BLDC/PMSM電機驅動器參考設計






 工商網監
工商網監
評論