 家用機器人的應用挑戰
家用機器人的應用挑戰
盡管在科普小說節目中可視化的許多小工具已經成為現實,例如移動通信,無人駕駛車輛和克隆,但今天的家庭和辦公室周圍幾乎沒有機器人助手。當然,許多房主都會抓住機會將重復的家務勞動卸載到一個自愿的自動機上。可以建議大量的家用機器人應用,但市場準備的產品出現緩慢。造成這種情況的原因可能是客戶要求尚未得到充分界定,或者尚未實現可負擔性和功能性之間的可接受平衡。隨著處理能力的價格持續下降,這種情況開始發生變化。此外,隨著小型低成本電腦板如CircuitCo Beagle Board或Arduino電路板的廣泛應用,全世界的機器人制造商社區都能夠吸引更多的肥沃思想,從而創造出可以產生合適的條件。在消費者市場中具有商業意義的平臺。
事實上,家用的第一臺自動機器人已經到了:付出了代價。諸如吸塵地板和割草等家務現在可以交給能夠在整個房間或草坪中導航以清潔或切割整個區域的機器。小型機器人真空吸塵器現在可以以200美元左右的價格購買,而機器人割草機是市場上新推出的,價格在1200美元左右或以下。
Hobby Robots展示未來之路
用于業余愛好者的機器人套件已經上市例如Parallax ActivityBot(圖1),以及使機器人進行諸如吸塵或割草等家務所需的引導技術得到了很好的發展和理解。這些已經在機器人設計競賽中得到磨練,例如自1991年以來一直在運行的年度名古屋國際微機器人迷宮大賽(MAZE)。
圖1:ActivityBot是一個基本的教育機器人板載各種技術,包括電力電子,加工和傳感跟隨線迷宮的算法可以基于兩個簡單規則之一。對于基本迷宮,假設沒有循環,右手規則或左手規則將保證成功。右手規則始終優先于向前直行或向左轉。如果沒有右轉選項,右手規則將始終直行而不是向左轉。相反,左手規則更傾向于左轉或直行而不是向右轉。
機器人可以使用紅外傳感器陣列檢測線路,紅外傳感器將紅外線(或可見光)照射到地板和監視器上反思。可以使用諸如Vishay TCND5000的紅外反射光學傳感器。將傳感器內聯布置在機器人的底盤上可以通過使用簡單的邏輯準確檢測左,右或死點位置,例如通過假設從白色地板反射的光產生高傳感器輸出而從較少的光反射來自暗線導致低輸出。當輸出改變時,可以檢測線迷宮中的T形接頭,以便所有傳感器同時指示看到黑色。類似地,如果左側傳感器指示黑色而右側指示白色,則可以檢測到左轉或右轉,反之亦然。所有檢測到白色的傳感器都表示死角。假設底盤具有獨立驅動的車輪,可以根據檢測到的模式調整左側和右側電機的相對速度,使機器人沿所需方向移動:前進,左,右或掉頭雖然迷宮比賽有助于加速機器人運動控制的發展,但簡單的線路跟蹤并不適用于商用設備,如吸塵器或割草機。需要采用不同的位置感應策略。
從挑戰到家務
一系列成熟的機器人真空吸塵器使用光學中斷來檢測事件,例如到達墻壁或一段臺階的頂部,或者檢測設備何時被拾取,因此應關閉。光學傳感器安裝在機器前緣的傳感器條中。這些傳感器可以包括分立的發射器和檢測器,或者可以是集成類型,例如Omron EE-SX-3070光敏微傳感器,其包括具有內置放大器和溫度補償的發射器和光電檢測器元件。傳感器桿具有模制的保險杠,其包括光束阻擋器,其在發射器和檢測器之間移動以在保險杠與墻壁接觸時偏轉時中斷光束。就EE-SX-3070而言,當光電探測器較暗時,其輸出為ON。另一個部件是EE-SX-4070在探測器點亮時提供ON輸出。機器人控制器可以使用結果信號作為房間邊緣到達的指示,并且可以指示從動輪改變方向。
類似的光學傳感器或微動開關可用于檢測機器何時具有當機器從地板上抬起時,當輪子下降到其外殼中時,通過激活來拾取。
對于樓梯檢測,通過測量光學反射來感測地板的接近度。諸如Vishay TCND5000反射光學傳感器的傳感器是合適的。 TCND5000是一款6 mm x 4.3 mm表面貼裝器件,其中包含一個紅外發射器,安裝在光電探測器旁邊,不包括可見光。它可以檢測到2 mm到25 mm范圍內的接近度。
在機器人真空應用中,這種類型的傳感器以朝下的方向安裝在機器邊緣的傳感器條中,并發出信號表示當反射信號突然變弱或不再檢測到時,已到達樓梯使用紅外或超聲波距離測量可以實現更復雜的非接觸式墻壁感測。基于紅外的距離測量傳感器(如Sharp GP2Y0A51SK0F)會產生與反射到內置探測器上的紅外信號強度成比例的模擬電壓。該傳感器能夠測量2厘米至15厘米的距離,通過使用三角測量法計算距離,最大限度地降低了檢測表面的反射率對測量精度的影響。紅外發射器,探測器和信號處理電路都集成在27.0 mm×10.8 mm×12.0 mm封裝內(圖2)。該傳感器提供快速啟動,在5.0 ms內產生其首次穩定的輸出測量。對應于15 cm的電壓與對應2 cm的電壓之間的典型輸出差異為1.65 V.
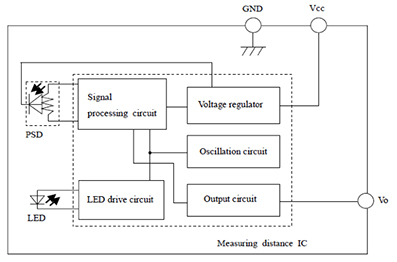
圖2:Sharp GP2Y0A51SK0F集成了生成模擬所需的電路輸出電壓與測量的距離成正比。在其他適用于機器人引導的非接觸式傳感技術中,已經提出了使用超聲波傳感的距離測量。諸如Parallax PING)))28015超聲波距離傳感器的接近感測模塊發射超聲波“啁啾”并產生輸出脈沖,該脈沖在接收到回波時終止。該脈沖的持續時間表示到最近的反射表面的距離(圖3)。在機箱的前部,后部和側面放置多個超聲波感應模塊,使機器人能夠檢測到相對于障礙物的位置,而不會有損壞設備或家居裝飾品或家具的風險。
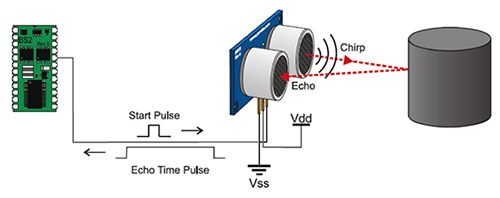
圖3:使用超聲波傳感模塊進行距離測量
正如迷宮解決機器人“學習”它所遵循的迷宮一樣,機器人吸塵器能夠繪制出需要清潔的地面空間。通過映射,機器人能夠返回其對接站,例如當集塵器上的傳感器發出必須清空的信號時,或者當電池充電狀態傳感器指示需要再充電時。當準備好恢復操作時,機器人可以返回其最后的工作位置以繼續。
讓我們去外面
機器人割草機必須應對不同的操作條件。通常無法使用方便的墻壁或其他反射表面來指示工作區域的限制。相反,電線被埋在或圍繞草坪的周邊。驅動電路在邊界線上傳輸信號,該信號可以是RF或音頻音調,并且安裝在割草機上的諸如無線電接收器,麥克風或電感傳感器的傳感器可以檢測該單元何時到達周邊。割草機通常在金屬圍欄區域內隨機移動,以切割比預先選定的切割長度更長的草。安全切斷對于此類應用至關重要,包括用于避免碰撞的接近傳感器和用于檢測裝置何時被拾取或可能意外倒置的傳感器。更復雜的割草機還可能包括溫度和雨水傳感器,使割草機能夠在天氣條件不適合割草時自動檢測。
市場起飛?
隨著消費者應用開始出現價格實惠的機器人,下一個前沿發展可能是機載機器人。 Parallax公司除了提供半導體和元件系列外,還提供教育套件,市場上有許多飛行機器人套件,并正在推廣無人機系統(UAS)教育計劃。這旨在增加多學科的專業知識,如軟件設計,電機控制,電子設計,包括GPS和加速度計和陀螺儀的使用,以及負責任的飛行等更廣泛的問題。潛在的應用可能包括緊急服務的救援援助,或玩具,新穎的園林照明或航空攝影等消費應用。
步行,說話的機器人個人助理可能仍然是科幻幻想,或昂貴的研究項目的主題,有一段時間了。然而,家用機器人的時代已經開始,通過高性能處理器和成熟,可靠且價格合理的傳感器等技術實現。
-
傳感器
+關注
關注
2548文章
50698瀏覽量
752038 -
機器人
+關注
關注
210文章
28212瀏覽量
206554 -
超聲波
+關注
關注
63文章
2990瀏覽量
138239
發布評論請先 登錄
相關推薦
智能家用機器人到底是個啥?
家用服務機器人將成為機器人的下一個入口
【mBot申請】家用機器人
家用機器人Q3數據弱,但是機器人黑馬融資猛進
電機驅動的掃地機器人介紹
家用機器人成為巨頭們的“群雄逐鹿”之地
索尼準備和美國卡內基梅隆大學攜手,染指家用機器人領域
家用機器人市場演變史,暗揣野心入局的各路玩家
Toyota引入VR頭顯 助力訓練家用機器人
家用機器人市場前景廣闊 家用機器人體系架構和零部件推薦





 工商網監
工商網監
評論