 解析ABB機器人與西門子S7-1200 profinet通訊
解析ABB機器人與西門子S7-1200 profinet通訊
一:網絡組態
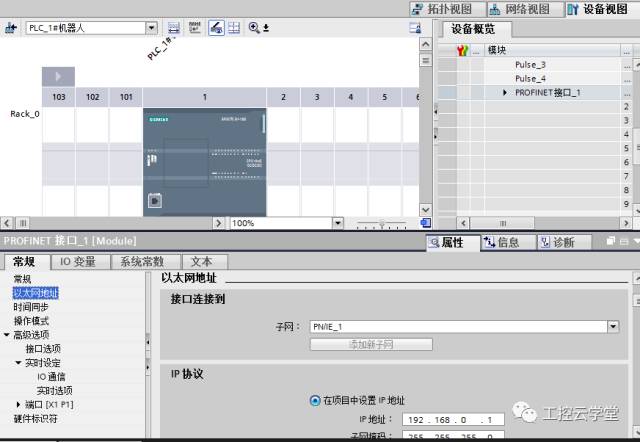
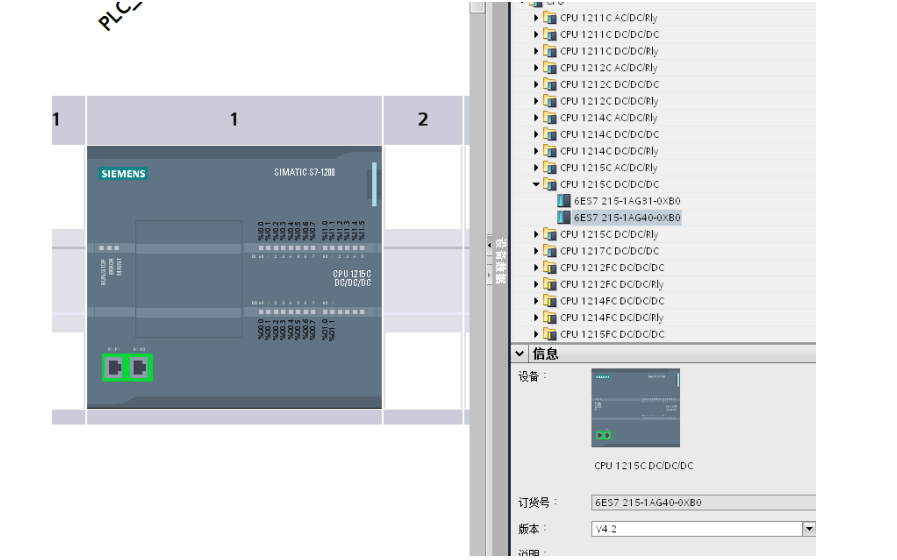
2.事先在博途軟件中加載機器人相應的GSD文件(DSQC688),然后在硬件配置中組態機器人,配置通訊映像區模塊。
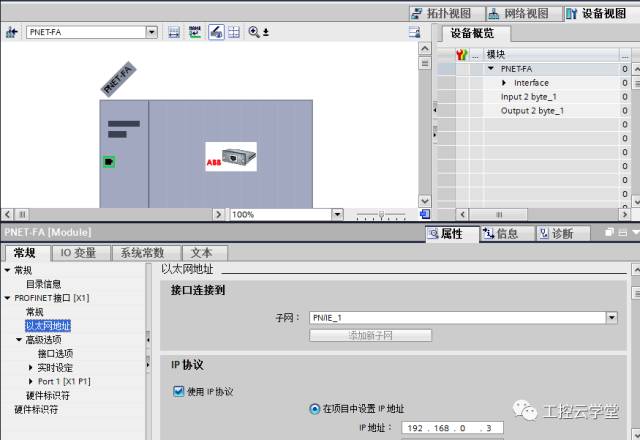
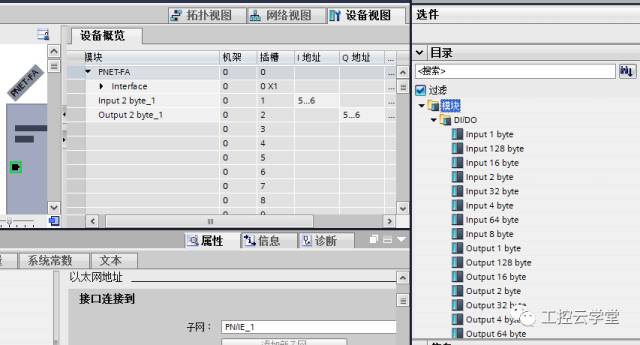
注意:此處配置的為兩個字節的輸入模塊跟兩個字節的輸出模塊,在機器人試教器上的設置要對應。
二:機器人試教器上的設置
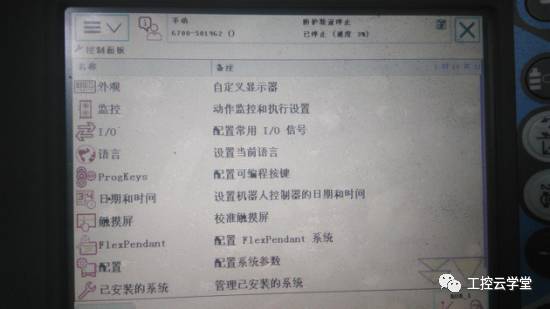
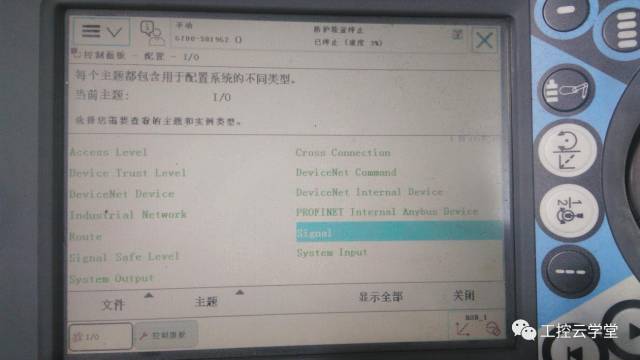
1.控制面板
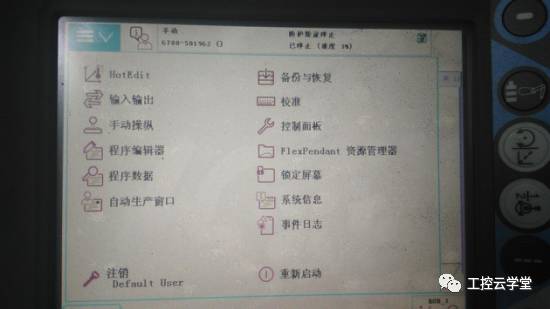
2.配置
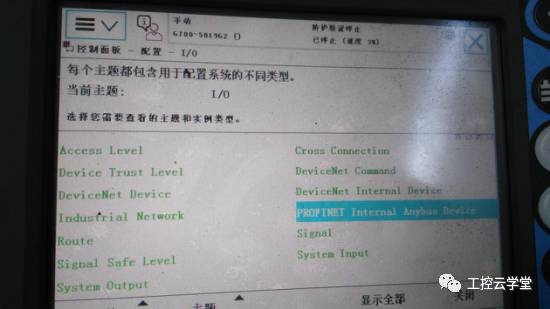
3.PROFINET internal Anybus Device
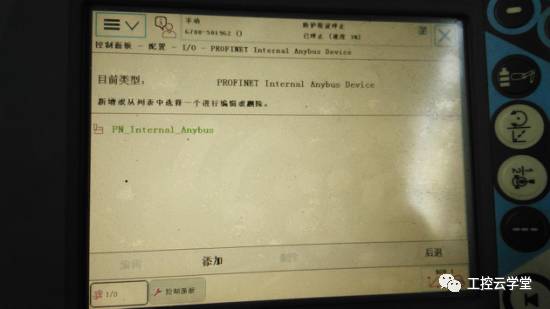
4.PN_internal anybus
5.PN_internal anybus 設置:
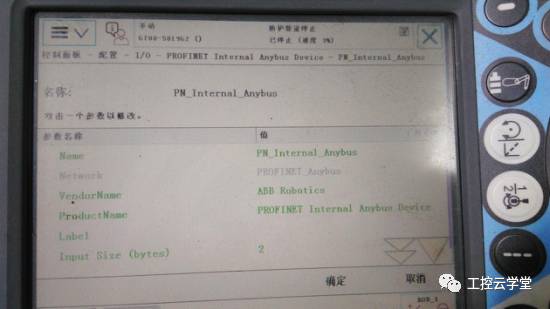
注意:Input size(bytes) 與Input size(bytes)后面的數字“2”代表這通訊的數據量,要跟前面提到的在博途軟件中配置機器人模塊時選擇的想對應。(在博途軟件中配置了2個字節,在此處就填“2”,如果前面選擇64個字節,那么此處就應該是“64”)。其他名稱都可以不用更
改用默認名稱。
6.上述5完成后返回上一層 然后選擇“Signal”
7.做信號配置
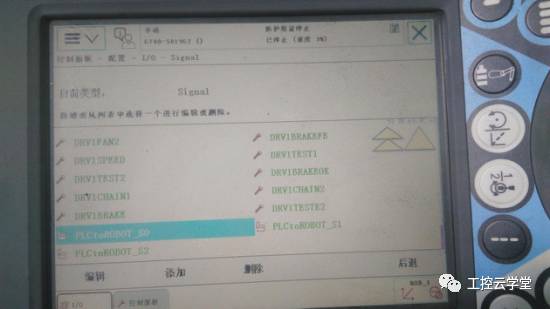
點擊“添加”進入到下一個畫面:
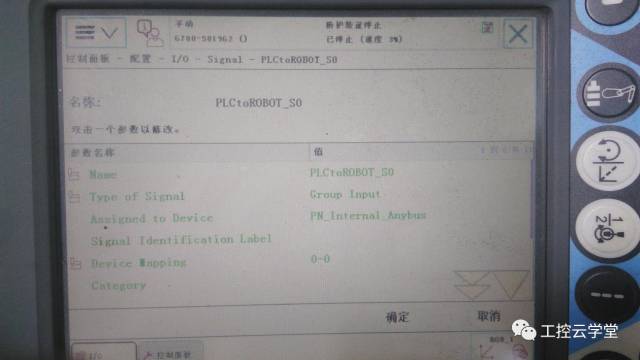
1.)Name:設置信號名稱,點擊后修改。
2.)Type of signal:選擇信號類型,如下圖,選擇“Group input”為數組數字量輸入。
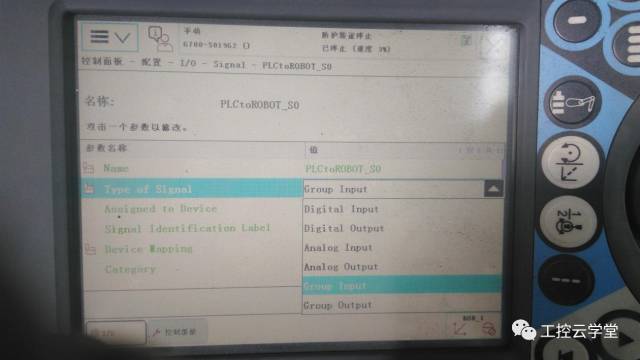
Digital input:數字量輸入
Digital output:數字量輸出
Analog output:模擬量輸出
Group input:數組輸入
Group output:數組輸出
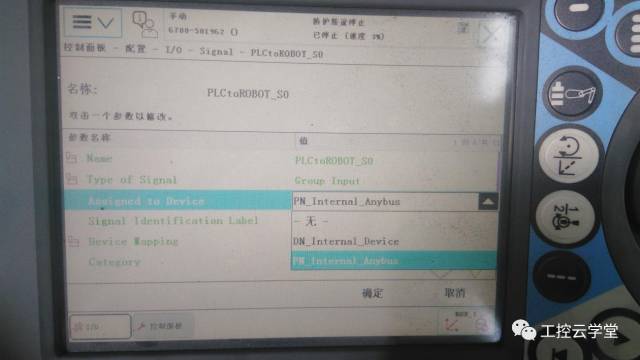
3.)Assigned to device 選擇“PN_internal_anybus”
4.)Device mapping
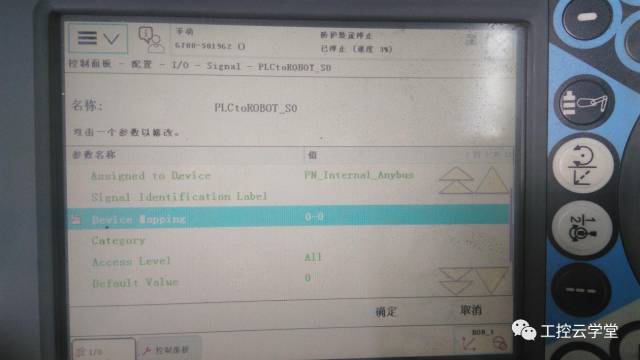
選擇“0”指定數據的第一個位的數據。“0-0”同樣也是第一位的數據。
選擇“0-3”指定接收數據的第一位到第四位的數據。
-
機器人
+關注
關注
210文章
28231瀏覽量
206615 -
西門子
+關注
關注
94文章
3009瀏覽量
115665 -
ABB
+關注
關注
26文章
521瀏覽量
52645
原文標題:ABB機器人與西門子S7-1200 profinet通訊
文章出處:【微信號:GKYXT1508,微信公眾號:工控云學堂】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
西門子S7-1200如何通過PROFINET通訊實現V90PN伺服控制


西門子PLC S7-1200在線下載功能分享
如何選擇合適的西門子S7-1200 PLC
西門子1200PLC之間的ModbusTCP通訊如何實現?
EPR6-S工業機器人通過EtherCAT轉profinet網關接入西門子系統






 工商網監
工商網監
評論