 法雷奧的研究人員開發了一種端到端的汽車速度控制模仿學習系統
法雷奧的研究人員開發了一種端到端的汽車速度控制模仿學習系統
隨著自動駕駛逐步邁向量產階段,來自傳統OEM和Tier1對新技術的投入正在產生結果。
去年6月14日,法雷奧全球首家人工智能和深度學習研究中心在巴黎成立。該中心將充分發揮法雷奧在自動駕駛領域的優勢,與科學界的專家機構、初創型企業、以及集團在全球的應用中心緊密合作。
這個命名為Valeo.ai的研發中心將致力于人工智能的算法、基礎架構、學習過程及模擬。所謂的深度學習是一種人工智能學習方法,向機器提供數據,以便其分析并適應新情境。該理念設法復制人類大腦的學習及思考功能,有助于使自動駕駛車輛識別目標并確定采取何種行動。
法雷奧的研究人員最近開發了一種端到端的汽車速度控制模仿學習系統。他們在arXiv上發表的一篇論文中概述了他們的方法,該方法使用具有長短期記憶網絡(LSTM)的神經網絡,這是一種可以學習長期依賴關系的遞歸神經網絡(RNN)。
就在剛剛結束的CES2019上,法雷奧展出了首款L4級自動駕駛汽車Drive4U,該車搭載了法雷奧目前已量產的各類傳感器(超聲波傳感器、攝像頭、雷達和激光雷達)及人工智能技術和數字大腦,能輸入并學習城市環境中遇到的各類環境信息并進行數據計算。
同時,法雷奧設定了每10億公里的重大事故數低于1起的安全目標,并通過Drive4U Remote遠程控制和Voyage XR虛擬感知技術來保證安全。
“我和我的團隊研究如何利用深度學習來實現更好的自動駕駛汽車的決策和控制。”上述研究人員表示,這項研究的目的是證明,在城市環境中,只使用相機,學習人類司機的能力,就可以處理復雜的情況。
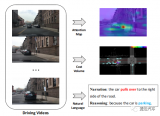
法雷奧團隊開發的新系統使用了一個依賴于深度學習技術的人工神經網絡(ANN)。首先,通過前向攝像頭拍攝有人駕駛車輛時的路面環境,因此很像這個人在開車時看到的東西。
然后訓練神經網絡來模仿駕駛員的動作,特別是專注于再現汽車當前的速度。例如,當輸入圖像包含一個50公里每小時的限速面板時,網絡會確保汽車的速度不會超過50公里每小時。當前面有另一輛車時,人類司機會相應地減速,網絡也學著這樣做。
“我們的方法試圖復制人類學習和駕駛的方式。該網絡只接收來自前端攝像頭的信息,不需要顯式感知,例如,與交通燈或車道相關的信息,就像人類司機沒有一個明確的模型,來精確地知道這些線在哪里,它們的形狀是什么。”研究人員表示。
在訓練完他們的神經網絡之后,研究人員在一個模擬環境中測試了這套神經網絡,然后把它集成到一輛真正的汽車上,在一個具有挑戰性的測試軌道上評估它的性能。他們發現他們的系統能有效地應對復雜的情況,在必要時控制汽車的速度(例如在交通錐和急轉彎時減速,在障礙物前停車,接近警告標志時等等)。
從目前自動駕駛的發展方向來看,首先是達到人類司機駕駛的水平,然后是更安全。而不是系統的駕駛能力不如人類司機。
上述研究證明,復雜的情況,比如工作區域、意想不到的障礙等等,僅僅通過觀察一個人類司機會做什么,然后在新的類似的情況下進行復制就可以解決。這意味著,只要我們有足夠的演示數據,我們就可以處理人類司機可以合理處理的用例。
這可以用在復雜的交互情況下結合更經典的方法,使車輛的自動駕駛系統做到和人類司機能夠一致和更智能地反應。
目前,這個系統已經取得了很好的效果,很快就可以應用到自動駕駛汽車上,從而實現更有效的速度控制和更直觀的駕駛。
研究人員正計劃將他們的概念驗證擴展到更復雜的情況,教他們的系統如何處理與路上其他車輛的更廣泛的互動,以及增加更復雜的操作,比如換車道、在十字路口轉彎或在環形車道上導航。
一直以來,深度學習很好用,幾乎改變了整個人工智能領域的發展,但在自動駕駛系統中,過去在感知的某一些部分(主要是圖像及視頻處理)使用比較多的端到端技術,而在決策控制層較少應用,原因在于深度學習沒有可解釋性。
不可解釋同樣也意味著危險,事實上很多領域對深度學習模型應用的顧慮除了模型本身無法給出足夠的信息之外,也有或多或少關于安全性的考慮。
研究人員補充介紹:“我們還希望研究該系統的可解釋性和與現有自動駕駛車輛的兼容性,向最終用戶解釋網絡如何感知其環境,以及它為什么做出決定。”
-
人工智能
+關注
關注
1791文章
46867瀏覽量
237590 -
自動駕駛
+關注
關注
783文章
13685瀏覽量
166150 -
深度學習
+關注
關注
73文章
5493瀏覽量
120979
原文標題:模仿學習人類駕駛,或為深度學習決策控制“可解釋性”鋪路 | GGAI頭條
文章出處:【微信號:ilove-ev,微信公眾號:高工智能汽車】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
爆火的端到端如何加速智駕落地?

智己汽車“端到端”智駕方案推出,老司機真的會被取代嗎?

端到端讓智駕強者愈強時代來臨?


研究人員提出一種電磁微鏡驅動系統
小鵬汽車發布端到端大模型
佐思汽研發布《2024年端到端自動駕駛研究報告》
理想汽車自動駕駛端到端模型實現

一種基于單像素光電探測器的高光譜視頻成像系統設計

研究人員開發出一種新型太赫茲成像系統





 工商網監
工商網監
評論