 自制四軸遙控飛行器
自制四軸遙控飛行器
如果你想享受飛行的樂趣,不想被裝機,修機折磨,并且又有一定的經濟條件的話,那么大疆精靈是你不二的選擇。如果你想體驗飛行和動手的雙重樂趣,或者RMB是個問題,那么自己動手制作四軸飛行器吧!
一、 基礎篇
1、理論基礎
首先,你得明白你要做的東西—四軸飛行器的工作原理。四軸飛行器大致由以下幾個部分構成:
①機架:飛機的骨架,載有各種設備
②飛控:飛機的大腦,載有加速度計、陀螺儀、氣壓計、羅盤等傳感器。由它來控制四個電機的轉速進而控制飛機的姿態。或是加上GPS完成定高定點返航等功能。其本質是單片機。常見的飛控有xaircraft的superX、DJI的NAZAWKMA2、零度的X4雙子星、APM、MWC、QQ飛控、CC3D等
③電調:全稱電子調速器,它的輸入是直流,通常由2-6節鋰電池來供電。輸出是三相交流,可以直接驅動電機。另外航模無刷電子調速器還有三根信號輸出線,用于接接收機。信號線可以引出穩定的5V電壓,一般可以帶2-4個舵機供電。航空模型就是通過遙控對航模無刷電子調速器的控制以達到調整飛機的各種飛行姿勢和動作。
④無刷電機:通過三相交流電產生一個旋轉磁場驅動轉子轉動。有寬調速、小體積、高效率和穩態轉速誤差小等特點。無刷電機KV值定義為轉速/V,意思為輸入電壓增加1伏特,無刷電機空轉轉速增加的轉速值。但對于無刷電機來說不只是說明電機轉速與電壓成嚴格的線性比例關系,詳見百度百科
⑤遙控、接收:顧名思義
Q:什么是美國手、日本手?
A:遙控器上油門的位置在右邊是日本手、在左邊是美國手。個人推薦美國手,左手控制油門和轉向,右手控制副翼和俯仰,比較符合認知規律
Q:幾通道是什么?
A:通道就是可以遙控器控制的動作路數,比如四軸需要控制油門、轉向、俯仰、橫滾四個動作,那么你最少需要一個四通道的遙控器
⑥電池:鋰電,不同于常見的鋰電池,最大的特點是放電倍率大
Q:電池上的幾S是什么意思?
A:幾S即為幾片串聯,比如3S2200mAh就是3片2200mAh的電池串聯,額定電壓11.1V,因為飛行器的功率大,所以我們要提高電壓來減小電流的熱損耗(Q=I2Rt)。又因為我們把鋰電池串聯使用,所以我們需要平衡充電器,簡稱平衡充。就是為了將每一片電池的電壓充到一個水平以防過充過放,鋰電池是很嬌氣的,所以我們平常用的電池都有保護板來防止過充過放,但是一般的保護板承受不了這么大的電流,所以在日常使用中必須用平衡充。
Q:電池上的幾C是什么意思?
A:放電倍率。是指電池在規定的時間內放出其額定容量時所需要的電流值,它在數據值上等于電池額定容量的倍數,通常以字母C表示。比如3S2200mAh20C,那么它的最大放電電流就是2.2*20=44A
⑦充電器:即為平衡充。可以將每一片鋰電池充到相同的電壓。有些還有放電、測內阻、繪制放電曲線等功能
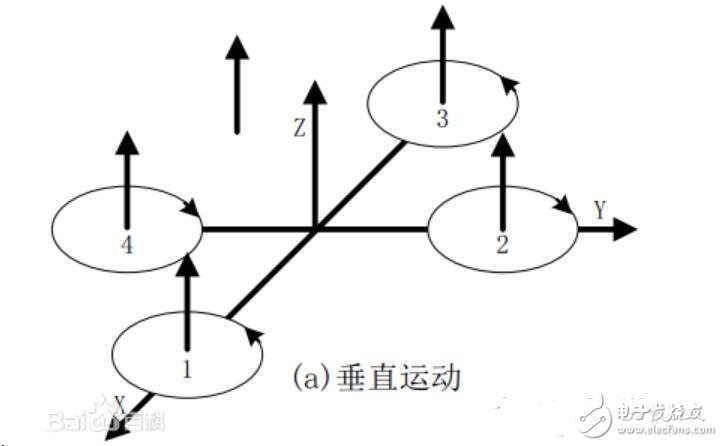
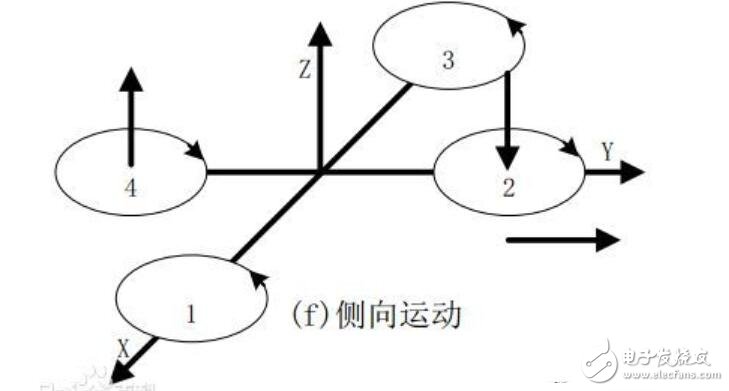
那么,四軸飛行器又是怎么運動的呢?(配圖以“十”模式為例,轉自百度百科)
圖(a)中,因有兩對電機轉向相反,可以平衡其對機身的反扭矩,當同時增加四個電機的輸出功率,旋翼轉速增加使得總的拉力增大,當總拉力足以克服整機的重量時,四旋翼飛行器便離地垂直上升;反之,同時減小四個電機的輸出功率,四旋翼飛行器則垂直下降,直至平衡落地,實現了沿z軸的垂直運動。在旋翼產生的升力等于飛行器的自重時,飛行器便保持懸停狀態。保證四個旋翼轉速同步增加或減小是垂直運動的關鍵。
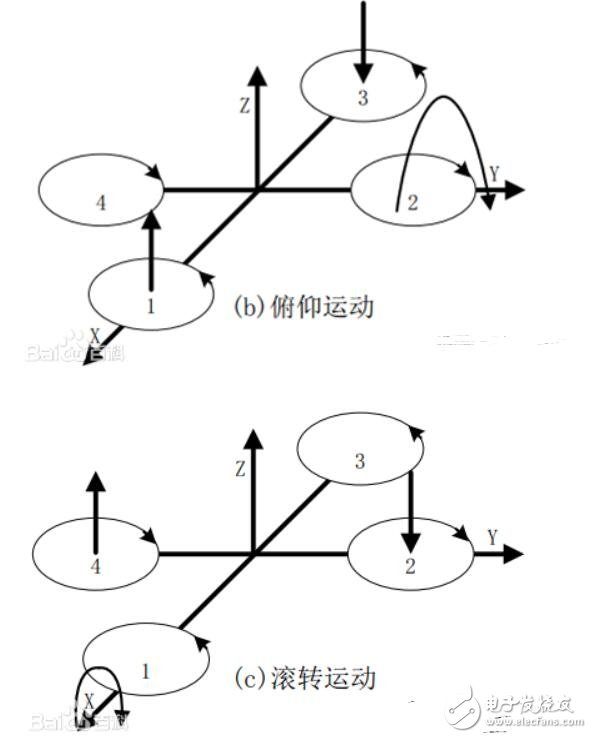
圖(b)中,電機1的轉速上升,電機3的轉速下降,電機2、電機4的轉速保持不變。為了不因為旋翼轉速的改變引起四旋翼飛行器整體扭矩及總拉力改變,旋翼1與旋翼3轉速改變量的大小應相等。由于旋翼1的升力上升,旋翼3的升力下降,產生的不平衡力矩使機身繞y軸旋轉(方向如圖所示),同理,當電機1的轉速下降,電機3的轉速上升,機身便繞y軸向另一個方向旋轉,實現飛行器的俯仰運動。橫滾同理。
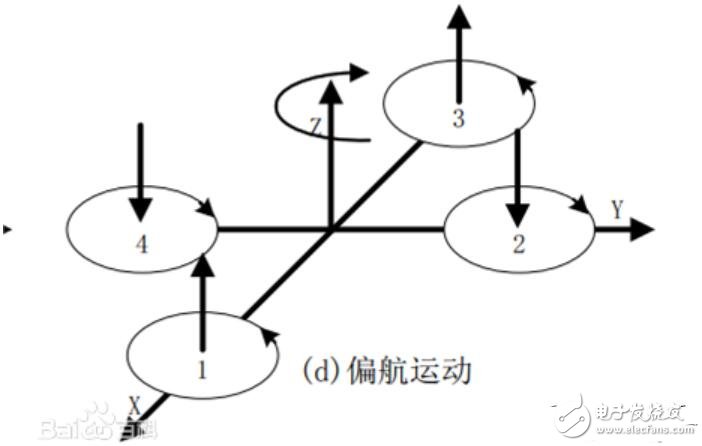
四旋翼飛行器偏航運動可以借助旋翼產生的反扭矩來實現。旋翼轉動過程中由于空氣阻力作用會形成與轉動方向相反的反扭矩,為了克服反扭矩影響,可使四個旋翼中的兩個正轉,兩個反轉,且對角線上的來年各個旋翼轉動方向相同。反扭矩的大小與旋翼轉速有關,當四個電機轉速相同時,四個旋翼產生的反扭矩相互平衡,四旋翼飛行器不發生轉動;當四個電機轉速不完全相同時,不平衡的反扭矩會引起四旋翼飛行器轉動。在圖(d)中,當電機1和電機3的轉速上升,電機2和電機4的轉速下降時,旋翼1和旋翼3對機身的反扭矩大于旋翼2和旋翼4對機身的反扭矩,機身便在富余反扭矩的作用下繞z軸轉動,實現飛行器的偏航運動,轉向與電機1、電機3的轉向相反。
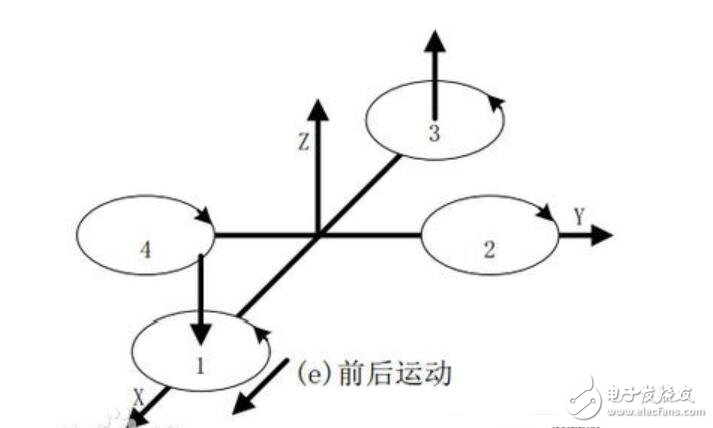
要想實現飛行器在水平面內前后、左右的運動,必須在水平面內對飛行器施加一定的力。在圖(e)中,增加電機3轉速,使拉力增大,相應減小電機1轉速,使拉力減小,同時保持其它兩個電機轉速不變,反扭矩仍然要保持平衡。按圖(b)的理論,飛行器首先發生一定程度的傾斜,從而使旋翼拉力產生水平分量,因此可以實現飛行器的前飛運動。向后飛行與向前飛行正好相反。當然在圖(b)圖(c)中,飛行器在產生俯仰、翻滾運動的同時也會產生沿x、y軸的水平運動。
2、工具基礎
為了減少不必要的花費,推薦大家一次性購買以下工具及耗材:
電烙鐵、剝線鉗、剪線鉛(普通鉗子hold不住那么粗的硅膠線)、內六角一套、螺絲刀一套(國產的南旗,極具性價比!)、小臺鉗、零件盒(我知道TB有一家挺便宜需要的可以PM我)、水平泡、熱縮管(4mm和5mm的用的比較多,別的看情況) 、BB響(小東西容易丟買幾個吧…)
二、 設備購買
大部分模友本地都沒有模型店,所以TB是主戰場,一定不要貪便宜去不知名的小店買,買到假貨得不償失(電機電調居多),畢竟天上飛的東西,安全最重要。
1.飛控:QQ飛控,有自穩,調試簡單,便宜。或者NAZAlite也可。NAZA用戶注意了,在調參軟件里把低壓保護關掉,否則你會發現飛行時間大幅縮水,直接用BB響設置3.6V報警。如果新手不能熟練降落那就設置3.7V報警吧,報警后還能撐2分鐘左右
2.電機:2212 KV980 推薦朗宇A2212(用的人多,便宜,售后也不錯) 銀燕2212(新出的,貌似也不錯)。出來飛,總是要炸的,不用買太好的,先用便宜的設備練技術。不過XXD真心不推薦
3.電調:如果沒有升級大電機的打算,好盈天行者20A足夠。還可以刷blheli固件,完爆鉑金。如果想一步到位可以入鉑金30A或者樂天(X-roter)吧。不過還沒上市……不推薦四合一,壞一個全不能用了
4.槳:8元一對的仿APC1047,自己做平衡。或者1045也行。第一次直接買至少十對,相信我,新手最容易壞槳。否則郵費比東西還貴就不劃算了
5.機架:可以用仿F450,便宜,炸了不心疼。新手不要配腳架,起降的時候容易翻。或者自己做,推薦鋁方管材料的,便宜耐炸還輕。可以參照我的架子
6.遙控:推薦一步到位,沒錢用華科爾D10或者天地飛9。有錢用futuba。不想一步到位的話天地飛吧,不要買天地飛 ,太坑了,出二手根本沒人要掉價特別快,天七掉價還慢點
7.充電器:推薦一步到位,不要買B6,根本就是個坑。最差也要UNA6吧
8.電池:本套設備用3S2200 25C 花牌不錯,質量售后都過得去,就是小貴。達普好像也行。不推薦雜牌。有動手能力的自己買電芯自己組(電池買3塊左右吧)
三、 設備組裝
1. 機架的安裝,詳見說明書
2. 電機與電調的連接:可以用香蕉頭,不過不推薦,引起新手炸機最高的兩個原因就是香蕉頭松脫和射槳。香蕉頭多次插拔后會氧化,變松。所以推薦調整好電機轉向后(將三根線中的任意兩跟對調以后即可反轉)直接焊死。電機具體轉向請參照飛控的說明。
3. 電調與插頭的鏈接:注意不要出現環形的線,以免產生電磁場影響電子設備。無把握可以用分電板,不過不推薦。
4. 電調與飛控、飛控與接收的連接:參照電調,飛控、遙控器的說明書。
5. 裝槳:調試時一定不要裝槳!調試完畢可以起飛時再裝槳。不要用子 dan頭這種東西,容易射槳,換成防松螺母。可能會不好擰,用普通螺母擰兩個也行
6.如果是這種電機座,或者類似這種伸出機臂的,不推薦安裝,反正我是不看好這種,輕輕一掰就有裂紋,不敢上天。
原裝電機座既輕又結實,搭配鋁方管簡直絕配,像這樣
四、 裝機完成后首飛前準備
1. 確保各個器件之間連接正確可靠,槳的方向正確,電機轉向正確,如果是管狀機臂一定要調水平電機座。確保遙控電量充足。遙控的通道與飛機各個動作對應,可以在地面調參軟件中查看
2. 最好練一下模擬器,隨便什么直機都行,練會對尾懸停就基本可以飛四軸了,有一定的舵面反應,別上天以后慌了神不知道手怎么動作就行。四軸特別好飛(如果你飛過直機),難度比直機小多了
3. 手法:新手初期飛行時,推桿時不要大舵量,畢竟不是玩具,怎么推都沒事。推桿時一定要一點一點推,要慢要穩。起飛時因為有地面效應飛機亂晃的話可以適當給一個大油門。(我首飛就是因為推桿太激動炸的,死無全尸)
4. 場地:一定要無人,空曠,遠離樓群街道。大疆用戶遠離一切可能有干擾的地方。最好無風
-
電機
+關注
關注
142文章
8938瀏覽量
145127 -
四軸飛行器
+關注
關注
55文章
206瀏覽量
51113
發布評論請先 登錄
相關推薦
雙軸測徑儀的四種樣式!
【求職】:老驥伏櫪,志在千里!求兼職音視頻、流媒體方向產品開發
利用圖像處理板避障 讓小型飛行器像昆蟲一樣靈巧

無人機通過什么傳輸信號
中科宇航研發太空旅行飛行器,預計2028年開展太空邊緣載人旅游
上海峰飛航空領先全球低空飛行器領域,展望2040年
基于非線性自適應學習控制器的四軸飛行器避障方案
傳感器融合的工作原理
什么是姿態傳感器MPU6050
【先楫HPM5361EVK開發板試用體驗】06-基于MPU9250的姿態解算
基于RT-Thread與滑模控制的微型多旋翼定點控制系統研究

磁力計LIS2MDL開發(3)----九軸姿態解算

四軸PID算法:單環和串級,你搞懂了嗎?






 工商網監
工商網監
評論