 基于精密積分器的傳感器電路設計
基于精密積分器的傳感器電路設計
1 引言
接收換能器包括標量水聽器和矢量水聽器[1-3]。顧名思義,標量水聽器只可測得聲場中的標量信息,而矢量水聽器,作為一種新興的水聽器,可以測出聲場中矢量參數。在理想流體中,沒有切應力,所以,聲壓為標量,質點振速為矢量[4]。因此,聲場中的基本信息既有標量參數,又有矢量參數,單單測得聲場的標量參數是不夠的,無法完整的表述聲場的全部信息,所以矢量水聽器的研究越來越得到重視。
利用矢量水聽器獲取質點振速的參數,傳統上是直接利用矢量水聽器中的振速傳感器(速度傳感器)獲取[5],具有便于信號處理的特點,但是由于其工作頻帶較窄,不適合直接使用。本設計針對這點,利用加速度信號具有在高頻段有高靈敏度的特性,用加速度計獲取加速度信號,利用精密積分器進行積分,可使改良后的速度傳感器兼具易于信號處理和工作頻帶寬的特點,性能更加優越。
2 技術優勢
積分芯片 ACF2101 是雙路積分器,具有很高的精確度。通過積分器,每路積分器可以利用內部或者外部的電容器,將輸入電流轉換為輸出電壓。芯片內部包含了高精度的 100 pF 電容、保持開關、復位開關以及多路輸出復用器。積分芯片 ACF2101 作為一個完整的電路,它消除了很多諸如泄漏電流引起的誤差和噪聲等在分立元件搭建的電路中經常遇到的問題。較于傳統的積分方式,ACF2101 芯片的噪聲更小,并且也省去了高性能、高阻值的反饋電阻。極低的偏置電流、低噪聲、ACF2101 的差動放大器,以及用激光裝配的補償和漂移,保證了電流到電壓轉換的精度。
3 系統的整體設計思路
本設計共有四路電路,分別是聲壓 P 路,加速度X 路,加速度 Y 路和加速度 Z 路。在聲壓 P 路的電路設計中,只需對所得到的信號進行放大工作,不需要進行信號轉換的工作,因此,此路電路只包含放大電路以及驅動電路。
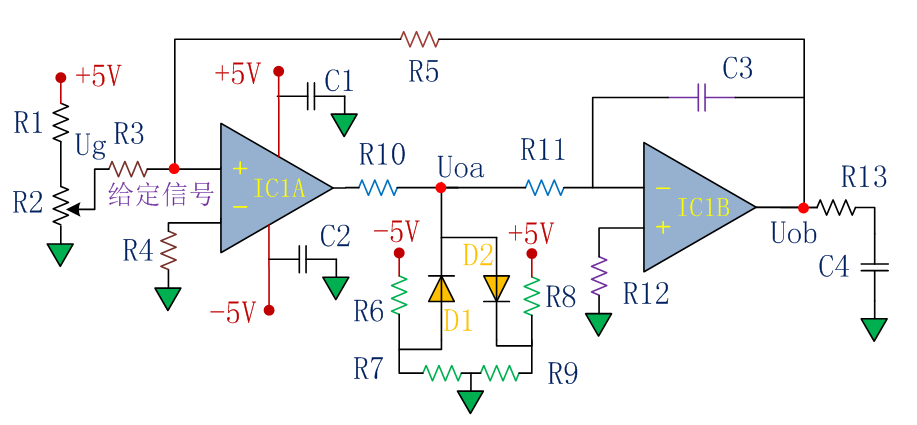
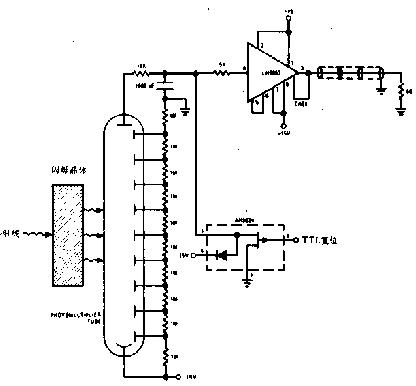
加速度電路的輸入信號為加速度信號,該電路應有兩種狀態:進行信號轉換狀態和直接輸出狀態。積分狀態下,在對接信號發生器時,由于積分器的輸入不能很大(實測是輸入為 10 mV 以上就會有失真),而且信號發生器的工藝限制了其輸出不能太小,因此放大電路置于積分電路之后并且在積分電路之前加入了衰減電路。使用的衰減電路為π型衰減電路,為了使輸入內阻變大,在最前端加入了電壓跟隨器,如圖 1 中虛框位置。而在對接加速度振子時,由于傳感器的輸出信號不大,此時可以去除衰減電路和電壓跟隨器直接進行信號的轉換。在不積分狀態下,信號越過積分部分直接進入放大部分,如圖 1 所示。
4 系統各硬件模塊的實現
4.1 加速度信號轉換模塊
作為整個積分電路的核心,積分電路在電路中起著至關重要的作用,積分工作主要由積分芯片ACF2101 承擔,積分電路圖以及積分芯片內部電路圖見圖 2。
輸入信號與 Sw In 管腳連接,通過積分器積分,從 Out 管腳輸出,電源正電壓與13管腳連接,電源負電壓與 12 管腳連接。芯片內部存在兩個開關:Hold開關和 Reset 開關,在進行積分時,需要保持芯片內部 Hold 開關閉合,Reset 開關斷開。積分芯片內存在 100 pF 的內部積分電容,由于積分電容較小,所以在 In 管腳和 Out 管腳之間接入了一個外部積分電容,與內部的積分電容并聯,增大了積分電容,保障了積分器的正常工作[6]。供電電源的兩路都放置了濾波電容,使積分效果更好。
在實際測量中,當給積分芯片輸入電壓大于 10 mV 時,積分波形發生失真,在電路中增加了電壓跟隨器和衰減電路部分,衰減電路見圖 3。
4.2 放大電路模塊
在進行積分后,在不同頻率下,由加速度信號積分出的速度信號的幅值有可能過小致使后續的芯片產生失真,所以在積分電路后加入放大電路,放大工作主要由放大芯片 INA620 承擔。放大電路見圖 4。
放大芯片的輸入為雙路輸入,一路連接傳感器信號(聲壓信號、加速度信號或者是速度信號),另一路接地,這兩個信號的輸入構成了偽差分放大,減少電噪聲對于傳感器信號的干擾,提高設計的精確度。
4.3 驅動電路模塊
在矢量水聽器的實際使用中,往往需要將水聽器放入水下較深的位置。驅動電路增強了整個電路的長線驅動能力。驅動工作主要由芯片 DRV135 承擔。驅動電路見圖 5。
信號由 4 管腳流入驅動芯片,驅動后的信號由 1 管腳和 2 管腳流出,電源正電壓從 6 管腳進入,電源負電壓從 5 管腳流入。
4.4 撥碼開關模塊
在實際的應用中,在測量聲場時,不但需要由加速度信號積分后獲得的速度信號,還有時需要加速度信號。于是本設計中采取開關電路來對是否積分進行控制,主要由兩個開關承擔此任務,電源開關以及積分開關。開關電路見圖 6。開關 S1 控制信號是否通過積分電路,即是否進行積分工作。開關 S2 控制電源,即是否給積分電路供電。當不需要積分電路工作時,開關 S2 直接斷掉了積分電路的供電,大大減少了元件之間的干擾,提高了整套電路的精密性。
5 測試數據和結果分析
從信號源分別發出一方波信號和正弦波信號,頻率為 1 kHz,幅值為 50 mV,輸入信號的波形與最終通過接插件的輸出信號波形的結合圖像如圖 7 所示。輸入信號為方波時,輸出信號為一個清晰的三角波;輸入信號為正弦波時,輸出信號為一個清晰的正弦波,與輸入信號的正弦波相差 90°。接著在固定輸入信號的幅值的情況下,在指定的頻段下(20 Hz 到 2 kHz)改變輸入信號的頻率,隨著輸入信號頻率的增大,輸出信號的幅值減小,隨著輸入信號頻率的減小,輸出信號的幅值增大。
為了說明本設計在對接傳感器后是否會出現理想的靈敏度,將實測的加速度傳感器的靈敏度與本課題測得的增益相結合,如圖 8(a)所示。
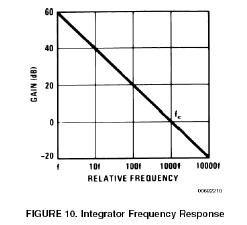
通過圖 8 可發現:對接傳感器后,速度傳感器靈敏度近似是一條平直的直線,加速度傳感器的靈敏度隨頻率近似呈線性變化。兩種傳感器的圖像都與理論推導吻合。
6 結語
矢量水聽器不僅能測量聲場中聲壓的標量信息,還可以測量質點振速的矢量信息[7]。在測量質點振速過程中,有加速度傳感器和速度傳感器兩類傳感器,加速度傳感器靈敏度隨頻率增大而增大,速度傳感器靈敏度不隨頻率變化,由于速度傳感器體型較大、不易加工,所以很少直接應用[8]。本設計針對這點,利用加速度和速度之間的轉換關系,利用加速度傳感器構成速度傳感器,使得其靈敏度為一恒定值,極大地方便了實驗的使用和數據的處理。
-
傳感器
+關注
關注
2548文章
50670瀏覽量
751982 -
積分器
+關注
關注
4文章
99瀏覽量
28421
原文標題:基于精密積分器的加速度-速度 傳感器電路設計
文章出處:【微信號:appic-cn,微信公眾號:集成電路應用雜志】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
積分器:Integrator

Rogowski線圈的原理和積分器的數字實現
羅氏線圈為什么要用積分器?






 工商網監
工商網監
評論