 基于傾斜攝影測量技術的建筑物立面圖制作流程
基于傾斜攝影測量技術的建筑物立面圖制作流程
一、引言
百城建設提質工程是河南省新型城鎮化發展的重要部署,街道立面改造作為其主要工作內容之一可以有效改善街道整體視覺效果,提升城市形象。因此,如何準確、高效地制作建筑物立面圖成為研究的重點。另一方面,傾斜攝影測量是國際測繪領域近年來興起的一項高新技術,它以大范圍、多角度、高清晰的方式感知真實場景,改變了傳統攝影測量只能從垂直視角拍攝的局限性,具有更豐富的影像信息、更高級的用戶體驗[1-3]。本項目以河南省鶴壁市浚縣的三條主干道為例,對測區進行傾斜攝影測量,通過ContextCapture和DPModeler兩款軟件實現三維建模與立面測圖。本文詳細闡述了基于傾斜攝影測量技術的建筑物立面圖制作流程,并將立面圖制作成果與傳統全站儀測量結果進行對比分析,最后對本文方法的優勢和創新性進行了總結與展望。
二、測區概況
本項目位于千年古城浚縣,浚縣地處河南省北部,太行山與華北平原過渡地帶,地形以平原為主,平均海拔63米,屬暖溫帶半濕潤性季風氣候,年均氣溫13.7℃。測區為黎陽路、新華路、黃河路三條主干道,一橫兩縱穿過主城區。黎陽路全長約4000米,改造涉及建筑物125棟,臨街商鋪462間;新華路全長約2500米,改造涉及建筑物101棟,臨街商鋪306間;黃河路全長約5000米,改造涉及174棟建筑物,臨街商鋪591間,致力于打造具有傳統韻味感知的現代商業空間。據了解,這三條路為浚縣的歷史文化資源與特色商業集中區域,街道立面改造將有利于城市風貌的展現[4]。
三、技術路線
本項目的實施包括外業和內業兩個部分。首先進行測區踏勘與資料收集,在充分調研的基礎上利用飛馬“無人機管家”軟件進行航線規劃設計,進而通過飛馬D200四旋翼無人機搭載五鏡頭相機獲取測區真彩色影像,傾斜航空攝影完成后進行外業像控布設。其次,通過ContextCapture軟件進行實景三維建模,基于三維模型通過DPModeler軟件進行立面測圖,將立面測圖成果與傳統全站儀測量結果進行對比分析。最后將測圖成果導入南方CASS軟件進行編輯輸出,完成立面圖制作。具體技術路線如圖1所示。
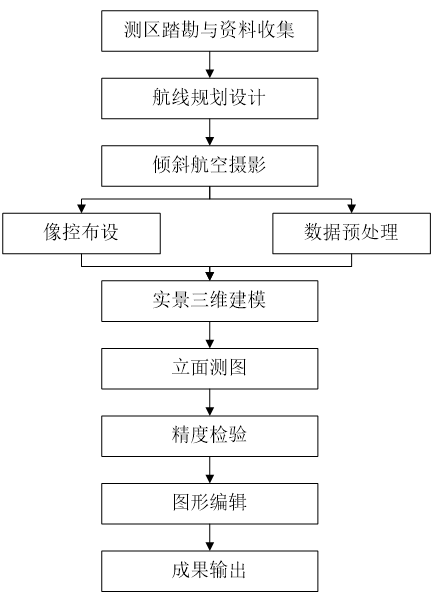
圖1技術路線圖
Fig.1 Technology flow chart
四、作業流程
4.1 傾斜航空攝影
傾斜航空攝影的航線設計采用深圳飛馬機器人科技有限公司的“無人機管家”軟件進行,該軟件集無人機數據獲取、處理、顯示、管理及無人機維護于一體,支持多種飛行器的航線設計、監控、數據快速質檢、4D產品生產等。通過“無人機管家”設計的航線,其相對航高、地面分辨率及物理像元尺寸滿足三角比例關系,航線設計通常采取航向重疊度60%以上,旁向重疊度30%左右,鑒于三維模型精細化表達需要,航向和旁向重疊度要求更高,具體的航線設計參數如表1所示,航線規劃如圖2所示。本項目通過飛馬機器人智能航測系統D200搭載五鏡頭相機D-OP300(如圖3所示),該系統具有作業效率高(單架次/48分鐘/2cmGSD/0.45km2)、焦距長(35mm鏡頭)、影像質量高(總像素1.2億)等優點,通過傾斜航空攝影方式共作業4個架次,飛行帶狀區域近12公里,獲取真彩色影像15500張,然后對獲取的影像進行質量檢查,對不合格的區域進行補飛或重飛,直到獲取的影像質量滿足要求。
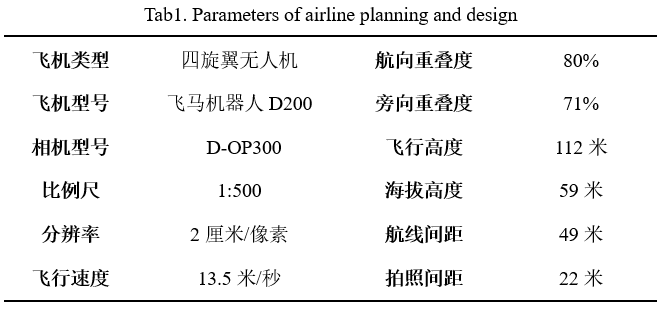
表1航線規劃設計參數表
圖2 航線規劃圖(以黎陽路為例)
Fig.2 Airline planning chart (takingLiyang road for example)
圖3 飛馬智能航測系統D200
Fig.3 Intelligent aerial photogrammetricsystem of FEIMA ROBOTICS D200
4.2 像控布設
本項目采用非全野外布點方案,外業只測定少量的控制點作為內業加密的基礎,可有效減少外業工作量。通常根據測區形狀、地勢、面積的差異采取不同的布點方案,就本測區的狹長特性而言,宜采用沿道路兩側交叉布點方式。由于道路較長約4000米(以黎陽路為例),布點間隔選擇300米左右交叉布設一個控制點,能夠使測區控制網更加穩固,滿足項目精度要求,像控點分布如圖4所示。根據上述布點方案,按照“先整體后局部,先控制后碎步”的原則,在首級控制點的基礎上通過GPSRTK采集像控點坐標,像控點坐標如
Fig.4 Image control pointsdistribution chart (taking Liyang road for example)
表2所示。
圖4 像控點分布圖(以黎陽路為例)
Fig.4Image control points distribution chart (taking Liyang road for example)
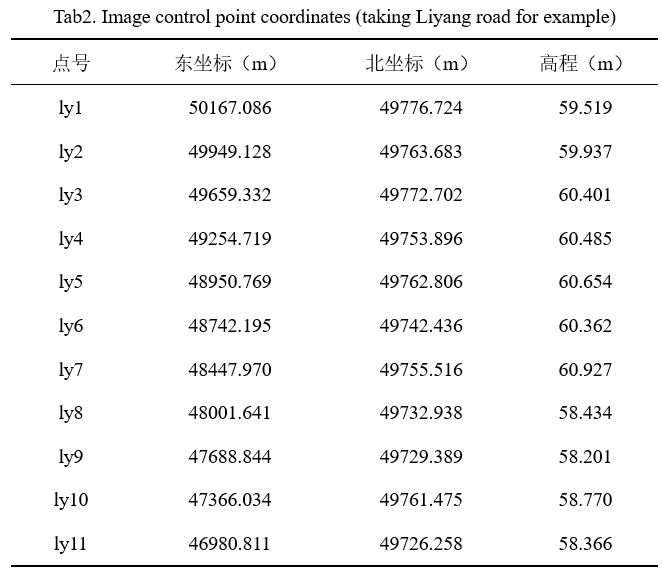
表2像控點坐標(以黎陽路為例)
4.3 數據處理
通過ContextCapture軟件進行數據處理,基礎數據包括原始影像數據、POS數據、控制點數據及相機參數。首先進行數據預處理,通過飛馬“無人機管家”智檢圖和智理圖模塊,完成原始影像的勻光勻色、畸變糾正、POS數據解算等工作。其次,將預處理完成后的基礎數據導入ContextCapture軟件平臺,進行新建工程、參數設置、提交空三、提交重建等系列環節,無需人工干預,最終輸出OSGB格式的具有真實紋理的高分辨率實景三維模型。該模型能夠準確、精細地還原出建模主體的真實色澤、幾何形態及細節構成,空三加密精度如表3所示,三維模型成果如圖所示。
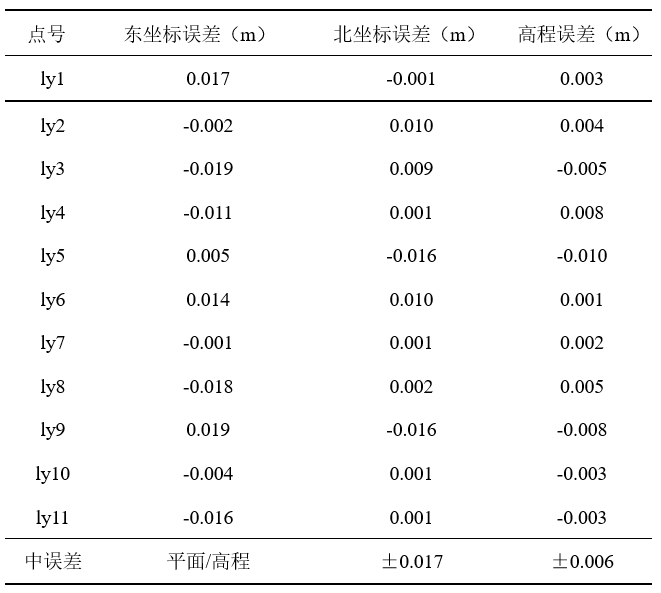
表3 空三加密精度統計表
Tab.3 Precision of aerotriangulation
圖5 三維模型成果(局部圖)
Fig.53D model (partial perspective)
三維建模完成后,首先利用武漢天際航公司的格式轉換工具將OSGB格式模型轉為DPModeler軟件可識別的OSG格式,通過設置坐標偏移值解決由模型相對坐標與絕對坐標差異引起的偏移問題。其次,基于OSG格式模型、xml格式空三及無畸變影像建立解決方案,通過DPModeler軟件實現建筑物立面測圖(圖6)。最后,將立面測圖成果導入南方CASS軟件進行編輯整理,完成立面圖的制作。立面圖制作成果如圖7所示。
圖6 建筑物立面測圖
Fig.6 Facade mapping of buildings
圖7 建筑物立面圖成果(局部圖)
Fig.7 Elevation of buildings (partialperspective)
五、精度校驗與效率對比
為了檢驗傾斜攝影立面測圖成果的精度,本項目通過傳統外業測量方法[5-7],利用南方NTS-332R4全站儀,采取特征邊測量的方式對建筑物立面進行抽樣采集。為體現抽樣數據的代表性,均勻選取特征明顯的建模立面進行測量。這里共采集158個特征邊與立面測量成果進行對比分析,統計兩種方法采集的坐標數據,計算得到誤差,如表所示。
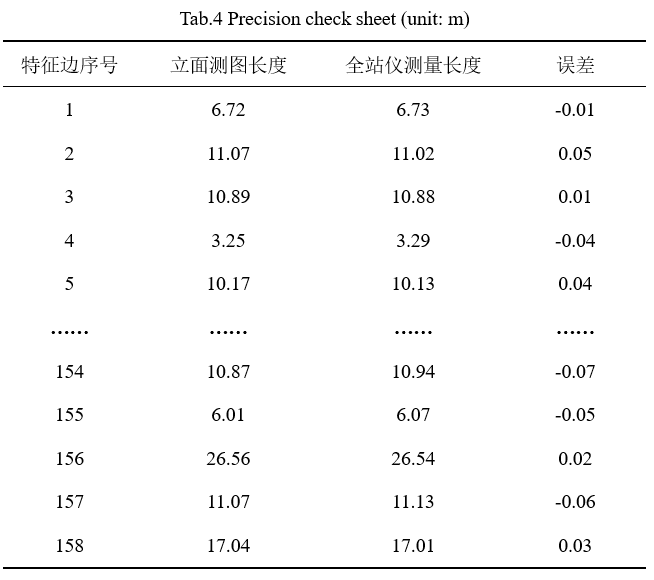
表4 精度檢驗表(單位:m)
根據表中的誤差分布,通過中誤差計算公式可得特征邊中誤差為0.05m;另外,特征點坐標中誤差均達到厘米級。由此可知,立面測圖成果滿足1:500大比例尺測圖要求。
就效率而言,2011年我單位于浙江省杭州市承擔過類似項目,通過傳統全站儀測量方法完成立面圖制作。這里以3公里立面測圖長度為工作總量,以組日(三人一組,工作一日)為工作單元進行效率對比,具體結果如表5所示。由此可知,基于傾斜攝影測量技術的立面測圖方法效率遠高于傳統全站儀測量方法。
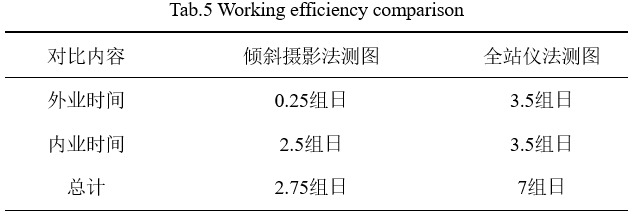
表5作業效率對比表
六、結論
本項目將傾斜攝影測量技術應用于建筑物立面圖制作,針對該方法在立面測圖過程中遇到的若干技術問題進行了研究與測試,并與傳統全站儀測量方法進行了精度和效率的對比分析,結果表明:基于傾斜攝影測量技術的立面測圖方法能夠滿足1:500大比例尺測圖要求,測圖效率相較于傳統方法有大幅提高。該項目的完成是高新技術在測繪領域中的有益嘗試,對于提高作業效率、改進作業模式具有重要意義,為以后類似項目的實施提供了參考。
-
測量技術
+關注
關注
1文章
182瀏覽量
24686 -
飛行器
+關注
關注
13文章
716瀏覽量
45469 -
無人機
+關注
關注
228文章
10340瀏覽量
179624
原文標題:傾斜攝影測量技術在建筑物立面測圖中的應用研究
文章出處:【微信號:feimarobotics2015,微信公眾號:飛馬機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
建筑物邊緣感知和邊緣融合的多視圖立體三維重建方法

建筑能耗監測對既有建筑節能的研究
建筑能耗監測對建筑節能的研究
光學透過率測量儀的技術原理和應用場景
先進技術構建的建筑智能化解決方案
建筑運維在數字化應用中有什么用處?
了解振弦采集儀在建筑物安全監測中的應用與研究
掌握紅外熱成像:守護建筑物的“水”關

泰來三維|三維掃描服務_三維掃描助力園區改造公園

淺析節約型高校建筑物電能能耗

NVIDIA Omniverse優化建筑物可達性設計
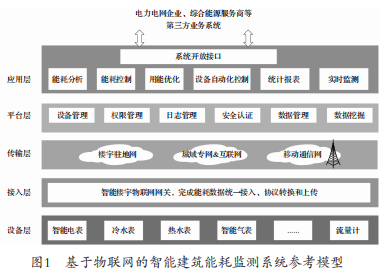
淺談基于無線物聯網的建筑能耗監測系統探討
遠程傾斜位移監測儀使用說明書
建筑物防雷檢測安全接地應用解決方案

利用紅外熱成像技術診斷建筑物的隔熱問題






 工商網監
工商網監
評論