 Civil Maps突破了用傳統的光柵圖像或點云數據來生成地圖的方法
Civil Maps突破了用傳統的光柵圖像或點云數據來生成地圖的方法
Civil Maps 突破了用傳統的光柵圖像或點云數據來生成地圖的方法,走出一條自己的路。
高精度地圖是自動駕駛中不可缺少的一環。不僅是它本身可以看是一個超視距的傳感器,而且配合高精度地圖的高精度定位技術在高級別自動駕駛中尤為重要。
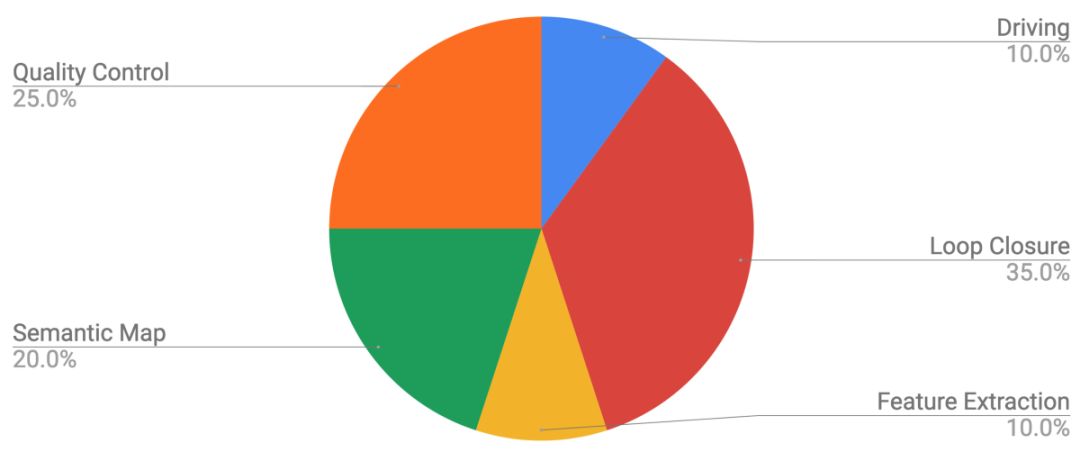
高精度地圖是個極其燒錢的行為,暫且不提后續的地圖內容制作與分發等,單單是設備齊全數量足夠的測試車隊就能讓很多意圖進入這個行業的公司望而卻步。在進行成本分解后,高精度地圖制作的大部分成本來自驅動物流,數據管理,循環閉包,特征提取,語義數據和云處理費用。
傳統圖商一般是利用光柵圖像或點云數據作為他們的基礎地圖層,數據量非常龐大。在復雜的數據管道中,可能會遇到四種不同類型的計算瓶頸。這些計算瓶頸可能是由于內存,CPU,網絡或存儲造成的。而Civil Maps平臺基礎地圖比傳統地圖小了一萬倍。
Civil Maps 為自動駕駛汽車開發了首個基于邊緣的高清制圖和本地化平臺。它憑借先進傳感器融合,六自由度(6DoF)指紋定位和Edge Mapping?的新技術,允許汽車OEM、制圖提供商和移動公司加速其自動駕駛計劃。
地圖繪制實際上涉及三個不同的層:首先是基礎地圖,然后是一個向量層,它用來描述形狀;其次是一個語義層。向量層和語義層需要盡可能頻繁地進行更新,最終目標是接近實時更新,要做到這一點,大多數的選擇是眾包:當自動駕駛汽車沿著道路行駛,將實際感知到的數據與基本地圖進行比較,然后將差異化的數據上傳回到云端,只要有足夠多的車輛在這么做,就可以擁有足夠的覆蓋率。
基礎地圖無法眾包,必須派一輛測量車去收集基礎地圖數據,然后上傳到云端,再通過自動處理或者人工的方式來進行標注和修改,然后發布。
因此,創建基礎地圖的數據量相當龐大,因為它們都是由原始的3D激光雷達點云或光柵圖像構建在云端的。而Civil Mpas生成基礎地圖的方式略有不同,使用AI算法來刪掉除所需傳感器之外的所有數據,進而創建“指紋基礎地圖”,這樣上傳到云端的數據要小很多。這套技術允許在三個地圖層中均使用眾包的方式進行數據更新。這是Civil Maps成本低的原因之一。
在2018年國際消費電子展上,Civil Maps推出了一款名為 CityScaleHDMaps 的新產品,并展示了實現城市規模高清制圖業務的一些核心功能。
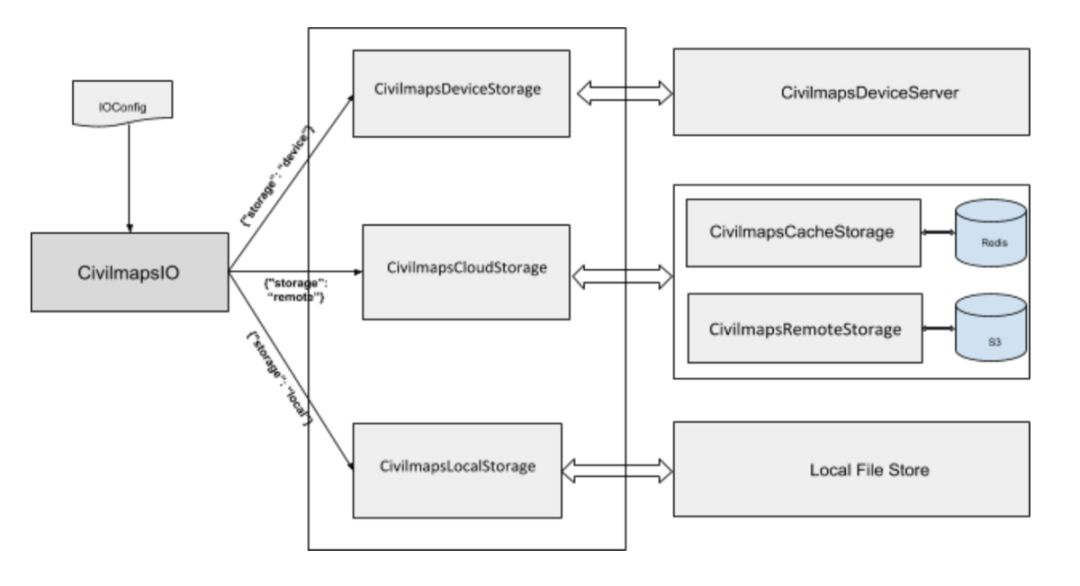
CityScaleHDMaps 的存儲框架是3種不同類型系統之間的復雜抽象。首先將Redis用作內存緩存,這是將數據移入CPU的L1和L2緩存或GPU內存的最快方法之一。Redis上面的第二層是邊緣分布式文件系統,它使用Ceph在我們的私有云中通過網絡在服務器之間移動數據,最后我們與AmazonSimpleStorageService(S3)同步,在所有邊緣站點上擁有持久的分布式存儲。存儲抽象是開發人員讀取和寫入數據管理層的無縫接口。能夠快速更改技術或數據同步架構,而不會影響應用程序層。通過抽象,重構的代碼變得很少。
傳統上,LoopClosure管道使用地面控制點將點云錨定到參考點,該參考點建立特定特征和對象的地面真實位置。這些地面控制點通常由專業測量員收集。在CivilMaps,利用機器視覺技術實現了閉環的自動化,實現了5CM的全球地理定位精度。
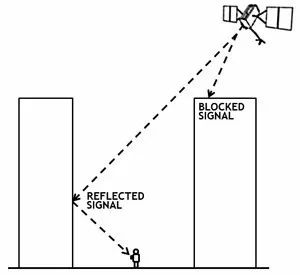
RTK GPS傳感器在復雜的城市環境中無法生成可靠的位置信息。傳感器數據在穿過城市某些地方會漂移,這會產生復雜性。通常,高層建筑會為GPS創建多路徑問題。即使使用差分GPS天線,性能也很差,特別是在舊金山這樣的城市。
除了RTK GPS之外,還有傳感器融合技術使用視覺里程計融合相機,LiDAR和IMU傳感器來創建校正軌跡。然而,由于GPS信號不良,IMU傳感器本身的輸入質量非常差。這種方法有其局限性,充其量只是對現實世界中地面實況位置的估計。
CivilMaps 引入了一種新穎的循環閉合方法和技術。利用機器視覺,同時使用航空影像和航空LiDAR作為參考共享坐標系。這更有利的原因是由于慣性系統在飛機上,而不是在高層建筑旁邊的地面上。如果慣性系統在天空中,并且上面的衛星具有清晰的視線,則GPS誤差和IMU漂移會大大減少。從而獲得非常精確的軌跡信息,可以使用30-50個地面控制點對大約1,000線性公里的道路網絡進行校正,而陸地唯一的環路閉合則是每100米一次。這是地面實況要求的一個數量級減少。CivilMaps利用航空三角測量的航空數據集來創建一個非常準確的共享坐標系。共享坐標系是地面實況地理參考數據集,它能夠融合來自多個源的點云。
駕駛飛機獲取高精度低分辨率點云數據,這只是創新的一部分。利用圖像和激光雷達的組合,通過尋找空中點云和地面點云之間的共同特征來獲得XYZ校正。得到修正后,將修正融合到里程軌跡中,得到精度為5cm的修正軌跡。
很少有地圖繪制公司可以聲稱精確度達到5厘米,目前基于地面控制和復雜RTK軌跡的大多數基礎地圖的精確度在15厘米到25厘米之間。然而,使用地面RTK的精度測量在復雜的城市環境中是不可信的。地面ONLY方法不起作用,有太多變量可能會破壞傳感器融合或驗證方法的質量。RTK協方差的誤報是導致傳感器融合質量差的首要原因。RTK的協方差不可信,因為生成軌跡的解決方案基本上是衡量它自身的準確性。
CivilMaps 發布的視頻中,在相互正交地比較獨立的數據集,其中一個被證明是高度準確的,不容易受到GPS漂移的影響,因為樹木、建筑物或加速度的快速變化。通過這種方法,將每次地面旅行集成到通過航空圖像+航空激光雷達數據集創建的共享坐標系統中,以創建一流的基礎地圖。這為創建可伸縮的城市高清地圖提供了新的可能性。
循環閉合后,CivilMaps繼續進行特征提取,將地圖劃分為單獨的地理空間區域。通過AirFlow使用mapreduce;各個docker容器獲取在循環閉包后發布的參考點云數據以提取功能。此特征提取過程提取相關的通道特征和幾何,以創建地圖所需的矢量幾何圖形。
創建矢量圖層后,在Unity中使用3D光線投射的單獨作業會創建相鄰的通道語義。最后發布到Web服務中以供使用。城市規模的高清地圖由于其大尺寸而可以是幾兆兆字節的數據。CivilMaps將HD地圖中的原始點云數據稱之為指紋基礎地圖的數據。指紋基礎地圖是原始點云數據的編碼版本,比原始點云數據小10,000倍。。
通過“6D定位”,即6個自由度,因為汽車將知道它的運動軌跡,也知道它的當前姿態。有了這些信息,汽車就可以定位自己,然后將對應的地圖數據投射到傳感器的視場中,傳感器就可以把注意力集中在特定的區域,而忽略其他區域。Civil Maps認為這樣做的好處是,知道要看哪里可以節省汽車的計算時間和計算資源,否則就需要反復重復對周圍環境進行識別以及與地圖進行對比的過程。
Civil Maps使用的增強現實標注方式也是現在大家的常用方式,這種方式相對于激光點云數據,更容易被常人理解。Civil Maps并沒有使用昂貴的GPU,而是在ARM Cortex上就可以運行這套程序。目前該公司已獲得福特汽車公司,上汽集團,Motus Ventures,Stanford-StartX 基金以及許多其他杰出投資者的資助。
-
傳感器
+關注
關注
2548文章
50698瀏覽量
752037 -
自動駕駛
+關注
關注
783文章
13687瀏覽量
166153 -
高精度地圖
+關注
關注
1文章
17瀏覽量
3035
原文標題:基于邊緣的自動駕駛導航定位公司Civil Maps實現了5cm城區高精定位
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
AIGC與傳統內容生成的區別 AIGC的優勢和挑戰
基于深度學習的三維點云分類方法







 工商網監
工商網監
評論