 L2級自動駕駛滲透率提升的前夜
L2級自動駕駛滲透率提升的前夜
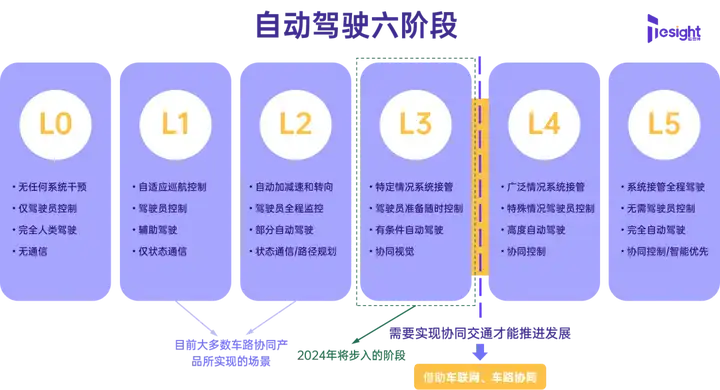
如何區分不同層級自動駕駛。根據SAE的分類,自動駕駛可以分為L1-L5級五個階段。簡單來說,L1就是能夠在直線加減速或轉向方面實現某一單一功能。而L2能夠同時實現直線加減速與轉向。L3允許駕駛員脫手,只需要在系統提示時接管駕駛。L4是不需要駕駛員參與,在一定場景下全自動。L5是完全的自動駕駛,無需人員介入。L4、L5也就是常說的無人駕駛。相對而言,L1到L2的難度較小,需要考慮的是如何同時協調兩個工作,而L2到L3的難度較大。
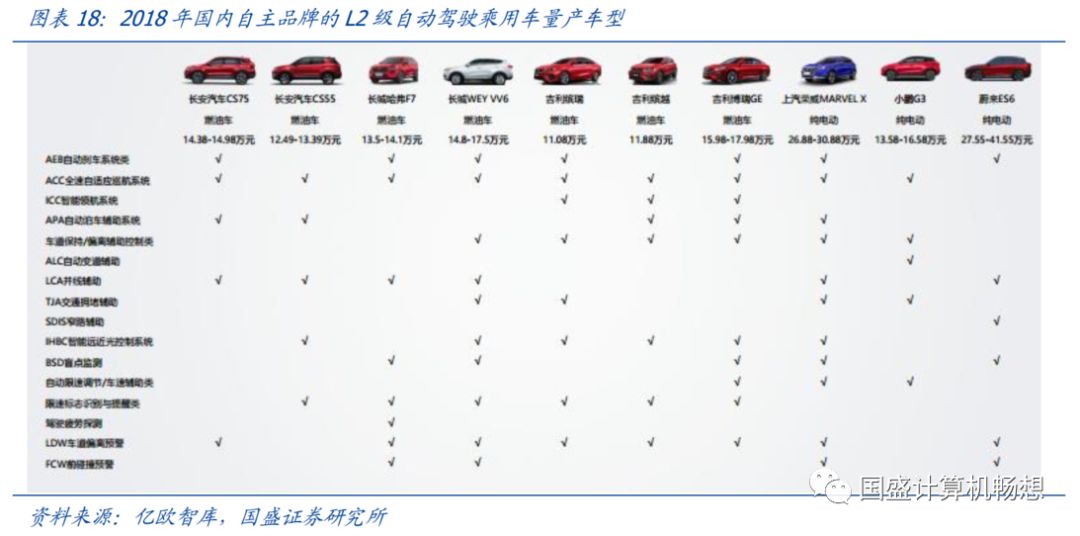
L2級自動駕駛離我們比想象的更近。當前主流車輛基本都配備了電子安全部件,基本都處于L1階段,即能夠實現加減速或轉向控制。18年下半年部分L2車型已面世,凱迪拉克、吉利、長城、長安、上汽等均已推出了L2自動駕駛車輛。根據各家規劃,目前吉利、廣汽、長安、長城等普遍已進入了戰略第二階段,2019年和2020年是主機廠實現L2和L3級別自動駕駛的關鍵節點。今年市場上將看到L2級產品百花齊放。
當前自動駕駛硬件滲透率幾何?我們采用爬蟲爬取了市場上所有燃油車型的全部配置(2872個車型),發現定速巡航、盲區監測、車道保持、碰撞預警、自適應巡航的整體車型滲透率為57.1%、17%、17.2%、19.3%、17.2%,且在40萬以上的價位區間里,車型滲透率最高,分別達71.1%、56%、61.5%、63.9%、67.5%。
三個維度理解未來L2級產品滲透率的提升:1)據發改委和工信部規劃,到2020年智能新車占比至少30%,而目前同時配備自適應巡航和車道保持功能的車型,占比僅為8.8%,銷量占比不到10%,因此到2020年L2智能新車滲透率將有一倍以上提升空間。2)2018年上市的L2產品如繽越、CS75等均月銷破萬,L2對產品力的提升促使車企配置加碼。3)未來滲透率的提升將聚焦在30萬以下級別車市,而從2019年起,國產替代浪潮將逐步推動自動駕駛硬件價格下降,使自動駕駛下探擁有基礎。
毫米波雷達:迎來國產替代+滲透率提升的雙重機遇:目前國內的毫米波雷達基本都被國際Tier1壟斷,19-20年,毫米波雷達供應商將迎來滲透率提升疊加國產化替代的機遇,整個市場規模預計增長超400%。建議關注目前已經量產毫米波雷達的德賽西威、華域汽車、在研的保隆科技。
高精地圖:雙重護城河,龍頭優勢穩固。高精地圖具備國家資質(要求導航電子地圖制作甲級測繪資質,目前國內僅有不到20家有資質)+先發優勢(高精地圖需要大量的進行路試及人工校核,完成繪制需要至少4年時間)雙重護城河,頭部優勢明確,建議關注已經完成全國80%高速路段測繪、在19年開展城市內商業化試點的地圖巨頭四維圖新。
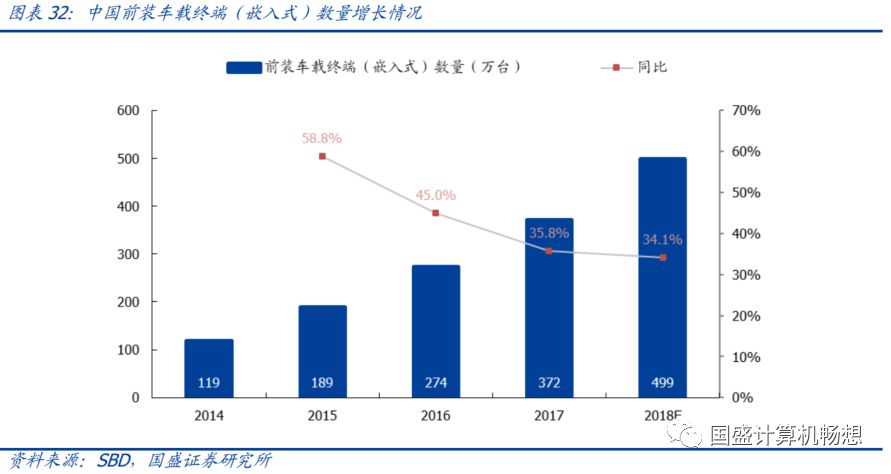
智能車載:滲透率提升,高景氣度,隨著智能網聯新車的滲透率快速提升,車聯網技術市場將會蓬勃發展,18年前裝車載終端(嵌入式)規模同比增速達34%。強烈推薦持續內生外延并舉,進軍車載信息系統、布局智能座艙的中科創達。
風險提示:宏觀經濟下行,整車銷量大幅低于預期;國內政策放開地圖資質壁壘;海外供應商對硬件的降幅超預期。
如何甄別不同層級自動駕駛?
對于自動駕駛,整個行業的態度可以分為兩類:
一類以整車廠為主,將自動駕駛更多理解為主動安全防護措施的一部分,比如國內的上汽乘用車,長安乘用車,吉利汽車等,希望通過添加自動駕駛強化對于使用者的安全防護,從而提升產品的競爭力,最終帶來銷量的提升。對于自動駕駛是溫和持續緩慢迭代的態度。
另一類則以偏創業企業為主,比如Waymo,切入點即為高級別的無人駕駛,最終希望能夠改變整體的商業模式和商務環境。
兩種介入者的形態決定了最終方向并不相同,傳統的主機廠為什么要從一級二級往上走?因為主機廠要及時且不斷地提供更多的安全和舒適功能給消費者,有了一級成熟的功能,肯定先把這一級的成熟功能給消費者去體驗,落腳點是產品力的提升。而谷歌、百度即使推出Level1和Level2,缺乏硬件支持的情況下,無法作為Tier 1供應商供給主機廠。因此,它們希望直接從Level4切入,徹底改變汽車的商業模式。
從整個行業來看,我們認為19年會是整車廠對于低級別自動駕駛突破的元年,L2級別的輔助駕駛將在未來2-3年內逐步成為全行業的標配。
自動駕駛方興未艾
部分功能的實現即可稱為自動駕駛。鑒于業界頻繁使用自動駕駛及其相關概念,但認知較為混亂,我們在本文中對自動駕駛進行了統一的界定:自動駕駛是指汽車能夠在某些具有關鍵安全性的控制功能方面(如轉向、油門或制動)無需駕駛員直接操作即可自動完成控制動作。
SAE(國際汽車工程學會) J3016文件提出的五級自動駕駛分級方案是當前被普遍采用接受的標準,也是本報告主要采取的標準。

其中:
動態駕駛任務DDT(Dynamic Driving Task):指在道路上駕駛車輛需要做的實時操作和決策行為,操作包括轉向、加速和減速,決策包括路徑規劃等。
物體和事件的探測和響應OEDR(Object and Event Detection andResponse):指駕駛員或自動駕駛系統對突發情況的探測和應對,在自動駕駛模式下,系統負責OEDR,應對可能影響安全操作的其他事物,進行檢測響應。
設計的適用范圍ODD(Operational Design Domain):將已知的天氣環境、道路情況、車速、車流量等信息作出測定,給定自動駕駛系統具體的條件,以確保系統能力在安全適用的環境之內。
動態駕駛任務支援DDT Fallback:自動駕駛在設計時,需考慮發生系統失效或者出現超出系統設計的使用范圍之外的情況,當該情形發生時,駕駛員或自動駕駛系統需做出最小化風險的解決響應。
對應于SAE分級標準,輔助駕駛、自動駕駛、無人駕駛是技術層層遞減、內涵層層縮小的過程。
智能駕駛包括了L1-L5,以及其他應用于L-的智能輔助駕駛系統技術,涵蓋了自動駕駛,以及其他輔助駕駛技術。他們能夠在某一環節為駕駛員提供輔助甚至能夠替代駕駛員,優化駕車體驗。主要是通過指搭載先進的智能系統和多種傳感器設備(包括攝像頭、雷達、導航設備等),具備復雜的環境感知、智能決策、協同控制和執行等功能,可實現安全、舒適、節能、高效行駛,并最終可替代人來操作。
自動駕駛包含了L1-L5整個階段,在L1、L2階段,汽車的自動駕駛系統只作為駕駛員的輔助,但能夠持續地承擔汽車橫向或縱向某一方面的自主控制,完成感知、認知、決策、控制、執行這一完整過程,其他如預警提示、短暫干預的駕駛技術(ADAS)不能完成這一完整的流程,不在自動駕駛技術范圍之內。
無人駕駛專指L4、L5階段,汽車能夠在限定環境乃至全部環境下完成全部的駕駛任務,特制駕駛員不介入情況下汽車可以完成全自動駕駛的控制動作,指向自動駕駛汽車技術發展的最終形態。
如何區分不同級別自動駕駛?
鑒于大家對于不同產品如何區分自動駕駛的級別、每個級別究竟能執行哪些操作有所困惑,我們對此進行甄別:
1、L0-無自動輔助功能(No Automation)
目前市場上基本沒有L0,因為無自動化意味著如ABS等最基本的配置也已經取消。
2、L1-轉向或者加減速能夠實現一條,駕駛員要時刻關注駕駛過程(Driver Assistance)
目前階段,主流車型基本都是位于Level 1階段。所有在駕駛員行駛過程中,對行車狀態有干預的功能都可以稱為駕駛員輔助,屬于Level 1的范疇。比如最基本的ABS,以及在ABS基礎上升級而來的ESP、高速路段常用的定速巡航、ACC自適應巡航功能及LKA車道保持輔助等。但是這種功能只能單一實現,無法在橫向或縱向控制中均執行,駕駛員依然需要關注駕駛過程。
3、L2-轉向和加減速都實現,駕駛員要時刻關注駕駛過程(Partial Automation)
Level 1和2最明顯的區別在于能否同時在車輛的橫向和縱向上進行控制。舉例而言,如果一個車輛能同時做到ACC+LKA(自適應巡航+車道保持輔助),那么這輛車就跨進了Level 2的門檻,2018款的凱迪拉克CT6擁有的半自動駕駛系統“Super Cruise”就是典型的L2級別,CT6不具備主動超車功能,因為停留在L2階段。
4、L3-不需要駕駛員監督,但在出問題時需要駕駛員介入(有條件自動駕駛)
有條件自動駕駛是在某些特定場景下可以進行自動駕駛,與此同時雙手可以離開方向盤。比如目前唯一宣稱達到L3自動駕駛的奧迪A8,在對外宣傳中限定了一個十分常見的場景——堵車,即為交通擁堵巡航功能(Traffic Jam Pilot),當車速小于/等于60km/h時,用戶可以啟動道路擁堵狀況下的自動駕駛功能,在當地法律允許情況下車輛會完全接管駕駛任務,功能上允許雙脫手,直到系統再次通知用戶接管。
5、L4-不需要駕駛員監督,但仍然有一定局限,在出問題時能夠部分解決(High Automation)
L4強調的是整車能夠解決部分問題,在一定場景下能夠解決部分問題,即駕駛員無需介入駕駛與監控突變事件。國外的Waymo、Uber還是國內的Baidu L4事業部做的都是L4自動駕駛技術的研究。
6、L5-全自動駕駛,只要在地球上有地圖的地方,全部都能自動駕駛(Full Automation)
最簡單的L5表述,給出一個GPS坐標點,L5自動駕駛車能夠到指定的地方,即完成全工況全區域的自動駕駛。
L1到L2到L3,難點在哪兒?
L1-L2的過程相對簡單,只是縱向控制和橫向控制的區別,這個難度并不大(當然,涉及到量產就要考慮到系統工程,汽車還要考慮成本最大的難點不在于單一的控制,而在于量產),難點主要是來自于兩個地方:1)汽車橫向與縱向控制的配合,即如何使橫向控制與縱向控制同時控制在最佳位置。2)通知駕駛員接管車輛的時機:因為L2并非較高級別的自動駕駛,需要駕駛員進行實時監控并做好接管。
L2-L3則難度有實質性變化:L2與L3關鍵就在于主機廠對于自己的自動駕駛是否有足夠的自信,來確保自己的感知與決策能力是與人類相當的。舉例而言,假如一輛車的整個生命周期,會遇到10000次危險情況,L2會聲稱自己可以辨識出9900個、9990個、9999個,但就是不敢承諾可以到100%——否則就是L3了。
在過去的數年中,雖然較多產品停留在L1階段,但是產品數輪迭代,在成熟度、適用性、穩定性上都有了長足進步。以吉利的G-Pilot 1.0為例:
吉利汽車從2015年博瑞上市開始就配備了很多ADAS系統,其中AEB、ACC、LDW等相關技術,已經在這一代產品上普及。這一代也是吉利的G-pilot 1.0技術運用的首款車。在2018年,吉利推出了GPILOT2.0,技術涵蓋ACC智能領航系統,單車道內可以做到自動駕駛,以及全自動泊車的技術。相比于此前的1.0,升級為2.0之后原有系統已經成為了一個系統工程,ADAS只是一個系統的堆積,在同一時間內執行一個命令,但是到了2級之后不僅僅是一個系統,而是多個系統的融合,同一時間執行幾個任務。與此同時ADAS本身的功能也并非一成不變,而是持續進行升級:
1、AEB系統分了幾個檔次:首先是警示加聲音提醒的FCW前方碰撞預警系統,如果駕駛員無反應就出現限速自動提示,這是第二級報警;第三級是自動介入剎車,在7公里到180公里范圍都可以啟動系統。此系統還包含了行人識別功能的主動式緊急剎車功能。從AEB的研發來講,第一代系統只有單雷達或者單攝像頭實現預警功能,第二代出現了部分制動功能,第三代提供了全制動功能。第四代多傳感器融合自動,包含對運動物體、靜止物體、行人等識別功能。
2、ACC系統也分為幾代,第一代是定速巡航,第二代是跟車的智能巡航,第三代是具有跟停功能的智能巡航,第四代帶起停功能的智能巡航。每一代都有技術進步,每一代技術的進步都依賴傳感器跟控制器的計算能力。領克01的ACC系統兼有跟停啟動功能,即排隊功能,跟停之后3秒內前車啟動,可以繼續跟前車行駛,如果等待時間長我們可以按一下Resume開關自動跟車,不需要人為加速。
3、智能駕駛的側向行駛:第一級是盲區報警,第二級是預警,第三級是自動干預,這里面包含了LDW、LKA等功能。
4、LDW報警系統:可以通過方向盤振動來提示;如果壓線了或者外面有車輛在你的盲區,都可以做到報警;進一步則是在單車道內可以輔助糾偏。
海外先行,國內緊跟
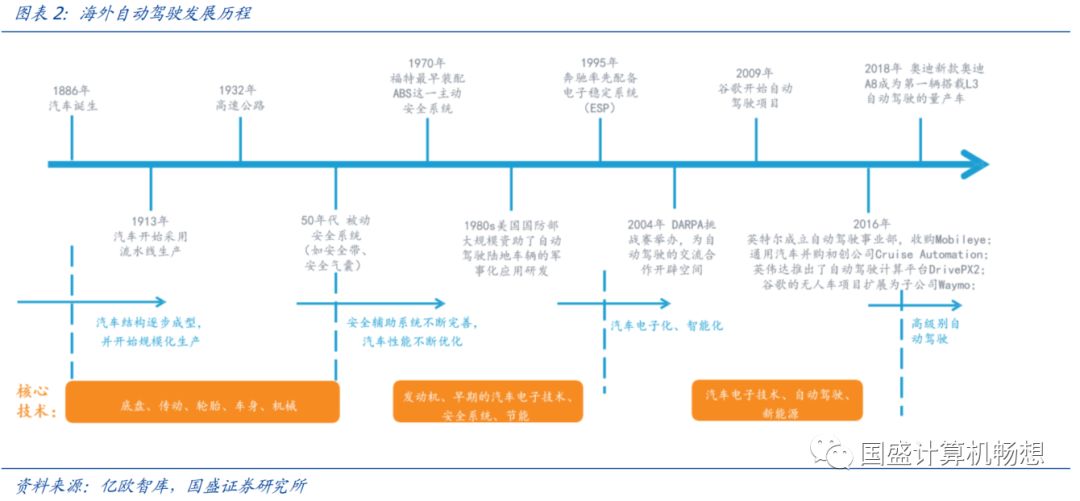
順著汽車電子化浪潮,海外率先開始自動駕駛布局。汽車在普及過程中,核心要素持續發生變化,被動式與主動式安全系統逐步配置,輔助駕駛系統日趨成熟,汽車的核心發展部件先后由底盤、傳統、車身過渡到發動機,再到汽車電子技術。而自動駕駛技術本質上是順著汽車電子的發展而進一步延伸的高級別形態。
從國際來看,美國在80年代初開始自動駕駛軍事化應用,而歐洲從80年代中期開始研發自動駕駛車輛,更多強調單車自動化、智能化的研究,日本的自動駕駛研發略晚于歐美,更多關注于采用智能安全系統降低事故發生率,以及采用車間通信方式輔助駕駛。
而進入21世紀以來,隨著DARPA競賽的開啟,提高了自動駕駛的社會關注度。從2009年起陸續開啟產業熱潮,谷歌首先布局自動駕駛,隨后英偉達成立自動駕駛事業部,收購Mobileye,通用汽車并購Cruise Automation,谷歌無人駕駛項目擴展為子公司Waymo。
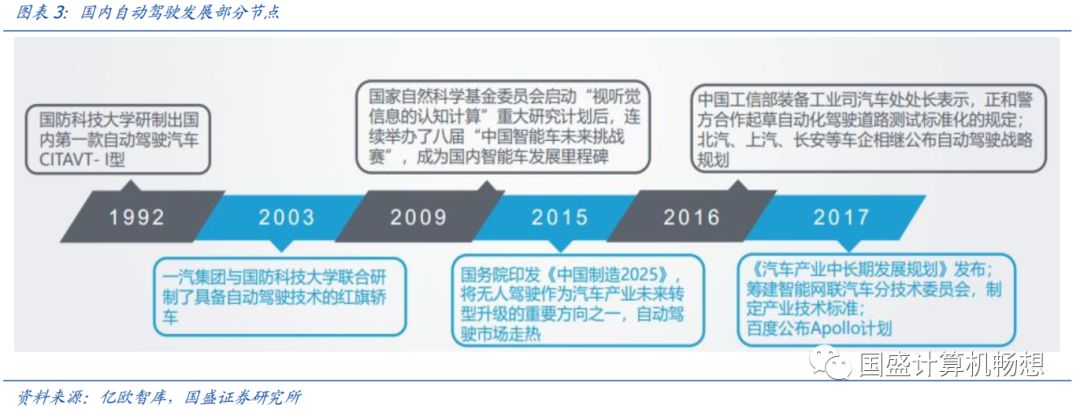
國內的自動駕駛起步依托于高校,自國內各高校和研究機構已經陸續開展自動駕駛的研發工作,推出多個測試車型。2009年起,國家自然科學基金委員會舉辦“中國智能車未來挑戰賽”,為自動駕駛技術的交流和發展起到了良好的促進作用。
國家戰略的推進刺激了行業快速發展:自國務院在2015年發布《中國制造2025》起,以自動駕駛技術為重點的智能網聯汽車成為未來汽車發展的重要戰略方向,大批初創企業投身自動駕駛領域;2016年,國內自動駕駛快速推進,多個車企公布自動駕駛的戰略規劃;2017年,更多的初創企業脫穎而出,獲得巨額投資目前開始進入收獲階段。
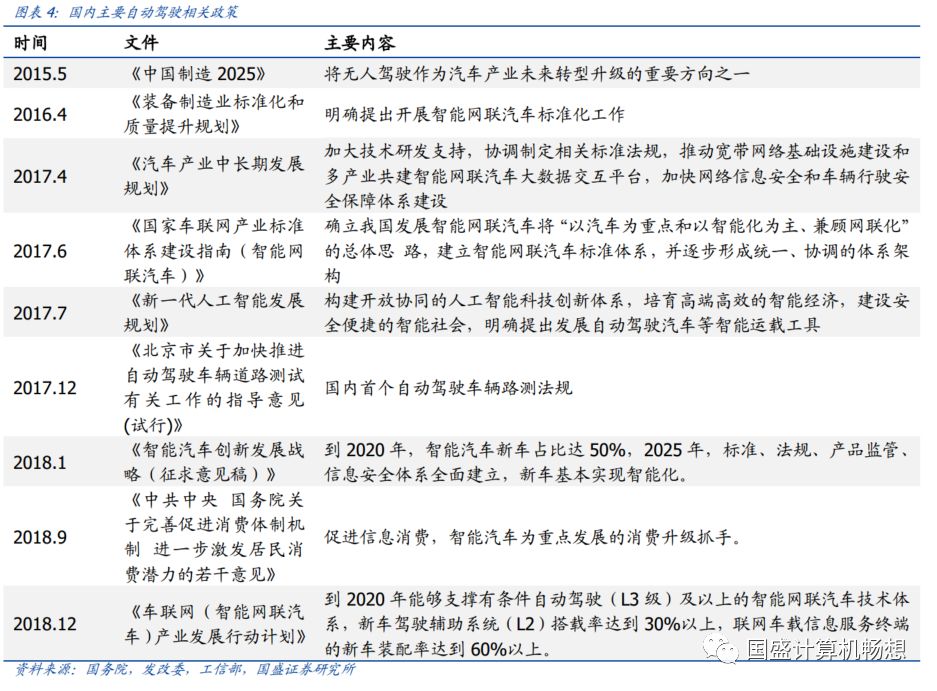
政策持續鼓勵扶持國內自動駕駛產業逐步落地。以2015年發布的《中國制造2025》為開端,自動駕駛已經成為我國汽車產業未來轉型升級的重要突破口。后續文件也陸續落地。
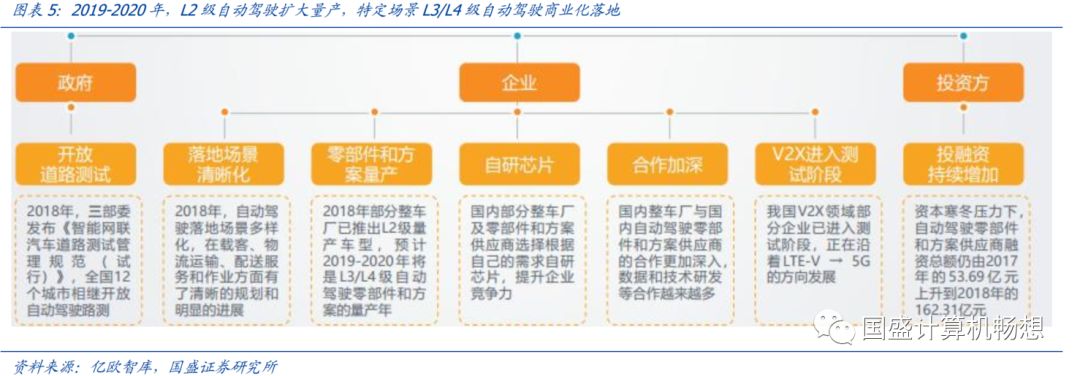
從目前來看,2019-2020年,L2級別自動駕駛量產同時向著L3/L4級別自動駕駛商業化落地為確定性方向。
1)政府:在全國12個城市開放路試
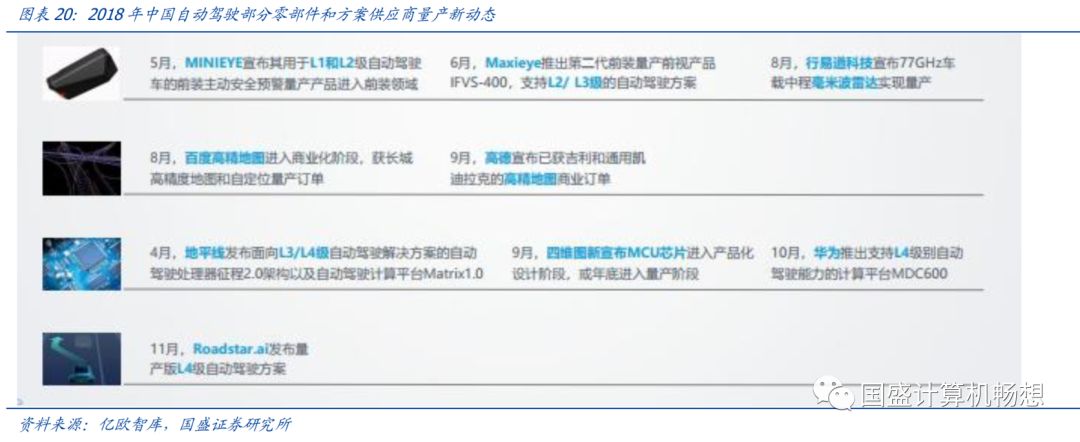
2)融資:自動駕駛零部件和方案供應商融資總額由2017年的53.69億上升到2018年的162.13億。
3)企業:整車和零部件的解決方案均進入成熟量產階段。
L2級自動駕駛下沉至30萬以內車市為必然趨勢
隨著自動駕駛快速接近量產,輔助駕駛技術、半自動、高度自動技術逐步得到應用。單項功能開始逐步滲透下沉,功能性和實用性快速提升。我們采用爬蟲對目前市場上所有燃油車車型配置進行了爬取,來估算每個功能目前的滲透率。此次我們共爬取了2872個車型的全部配置。
我們發現,諸如前碰撞預警、車道偏離預警、車道保持系統、自動泊車輔助等L2級別功能已經得到了廣泛應用,未來重點發展的方向在于由30萬元以下級別車市,而重要推手就是隨著自主品牌已率先將L2應用到10萬元左右價格的乘用車,證明了產品力的提升。
19年和20年是L2、L3級量產落地關鍵節點
根據2018年1月的《智能汽車創新發展戰略(征求意見稿)》,到2020年我國新車中智能汽車占比將達到30%以上。而目前國內整車廠和集成供應商已基本具備L2級自動駕駛能力,2018年開始,自動駕駛的產品已經逐步登上舞臺,部分主機廠已經實現量產,預計在2019年到2020年會更大規模的量產。而與此同時乘用車以外,國內部分企業已經在進行L3/L4級自動駕駛卡車和配送車的車試運營,多家企業計劃在2019-2020年實現特定場景下的L3/L4自動駕駛量產商業化落地。
而政策面也進行了松綁,給了主機廠做路測的空間:北京已于2017年12月份確定了33條、共計105公里開放測試道路,并發放了首批試驗用臨時號牌;上海也于2018年3月份劃定第一階段5.6公里開放測試道路,并發放了第一批測試號牌。此外,重慶、北京-河北、廣州、浙江、福建、吉林長春、湖北武漢、江蘇無錫等地紛紛建設智能網聯汽車測試示范區,積極推動半封閉、開放道路的測試驗證。

從對主要車企的自動駕駛戰略進行了梳理和匯總來看,19年和20年將是L2與L3級別自動駕駛量產落地的關鍵節點:
吉利:G-Pilot戰略,2018年L2,2020年L3
吉利提出了自動駕駛“四步走”的G-Pilot戰略,吉利在2018年推出了G-Pilot 2.0,使其自動駕駛水平處在Level2的水平,預計在2020年之后才能提供Level3及以上水平的自動駕駛:
1、G-Pilot 1.0主要實現ACC自適應巡航、AEB自動緊急制動、LDW車道偏離預警等功能,吉利從2014年的博瑞車型開始,搭載G-Pilot的相關高級輔助駕駛(ADAS)功能,目前被搭載于吉利博瑞、博越、帝豪GS、帝豪GL等車型。
2、G-Pilot 2.0階段,車輛可以實現縱+橫向的動力學合成控制,通過多傳感器數據融合技術,提高環境感知精度和可靠性。G-Pilot 2.0已實現特定環境下的自動駕駛能力,例如ICC(單車道集成式巡航),自動泊車系統,并后續會更多適配到吉利各個量產車型上。
3、G-Pilot 3.0是目前吉利投入主要研發精力的下一代自動駕駛平臺,實現司機解放雙手的體驗。在G-Pilot 3.0中,車輛可實現臨近車道的變道以及無人監控的自動泊車操作等,并結合更多車聯網信息娛樂,和云端服務功能。
4、G-Pilot 4.0是吉利自動駕駛技術路線的更高層級,該平臺結合了自動駕駛技術以及出行算法邏輯,可實現司機完全解放,并提供完整的出行服務。
目前吉利主要是與ABCD(奧托立夫(Autoliv)、博世(Bosch)、大陸(Continetal)、德爾福(Dephi))四大國際Tier1 供應商開始合作,且已經啟動了實際道路的測試,預計實現共計10億公里的測試。目前吉利已經獲得了重慶無人車上路的第一批測試牌照,而在歐洲和沃爾沃正在做聯合開發,沃爾沃2017年在瑞典哥德堡已經啟動了DriveMe項目。
廣汽:GIVA智能駕駛平臺,2020年L3
2013年,廣汽集團開發了首款具備自主知識產權的無人駕駛汽車;2015年自主研發的無人駕駛WitStar概念車參加了北美底特律車展;無人駕駛汽車WitStar則已具備局部區域內任意預設兩點的全自動無人駕駛能力;2017廣州車展上,廣汽亮相了第三代全自動駕駛原型車,該車可以實現L5自動駕駛。目前,廣汽正在廣州化龍基地打造自動駕駛示范園區,探索智能汽車應用場景。
此外,廣汽集團還在今年2月初與廣州小馬智行科技有限公司簽訂戰略合作協議,約定雙方將在自動駕駛技術、無人駕駛示范運營等領域開展合作,共同推動無人駕駛領域的發展。
廣汽集團將分四個階段實現無人駕駛。第一階段是輔助駕駛,實現自動泊車、駕駛提醒等功能,現已實現;第二階段是半自動駕駛;第三階段高度自動駕駛;第四階段完全自動駕駛,預計2030年前實現。目前廣汽在較多量產車的高配版本、頂配的版本上已經或即將實現自動駕駛L1、L2級。而2019年是廣汽規劃的L3量產節點,希望在2020年年初實現L3的量產,2022年實現大批量L4量產的能力。
同時廣汽集團在18年車展上正式推出GIVA智能駕駛平臺計劃,GIVA是基于廣汽自主研發純電SUV GE3推出的“開發者版本”,擁有業界領先的整車性能,聯合世界一流的零部件供應商打造了響應快速、控制精確、安全穩定的轉向、驅動、制動線控系統,并聯合智能駕駛領域一流的合作伙伴可以為開發者提供包含傳感器、計算平臺、V2X、高精度地圖、智能駕駛算法的部分或者完整解決方案。廣汽研究院還將開放涉及轉向、制動、電子駐車等128個控制接口,以及傳動系統、底盤等至少142項車輛參數。這兩項舉措將讓GIVA能夠在極短時間內完成智能駕駛汽車的上路、測試等。
廣汽研究院將和所有合作伙伴在這款平臺車上,共同探索智能駕駛新技術,構建一個“合作緊密、不斷迭代、技術領先、值得信賴”的智能駕駛研發生態圈。
長安:“654”戰略,2020年L3
在智能化汽車方面,長安已制定了面向2025的智能汽車技術發展規劃,即“654”戰略。內涵是要搭建6大平臺,掌握5大核心應用技術,分4個階段實現智能化技術的產業化。
這四個階段分別是:在2015年底完成第一階段,具備駕駛輔助功能的產品量產上市,主要應用技術包括全速自適應巡航、半自動泊車、智能終端3.0等;2018年完成第二階段的目標,即半自動駕駛技術的開發及產業化,搭載集成式自適應巡航、全自動泊車、智能終端4.0;2020年達到第三個階段,將完成高度自動駕駛,功能包括高速公路全自動駕駛、一鍵泊車、智能終端5.0;最終,長安預計在2025年達成真正的全自動駕駛,并實現產業化應用。到2020年長安將不再生產非網聯新車,實現100%聯網,100%搭載駕駛輔助系統,2025年實現100%語音控制,L4級智能駕駛產品上市。
在智能網聯方面,長安汽車將整合全球資源,形成“三國三地、各有側重”的全球智能網聯汽車研發體系。長安汽車已在長安研究總院設立智能網聯技術研發中心,長安美國中心設立智能網聯研發部門,同時準備在硅谷設立辦事處,在印度建立離岸軟件中心,形成“三國三地、各有側重”的全球智能網聯汽車研發格局。
上汽:全面布局單車智能、高精地圖
上汽集團在自動駕駛領域的部署主要有中外兩個部門在主導,國內是上汽的前瞻技術研發部門,今年4月份,該部門正式對外展示了上汽的level 4級自動駕駛技術,另一個部門是上汽兩年前在硅谷成立的風險投資和創新部門。上汽集團已經開展了封閉試驗場、高速公路、特定園區及城區、地面及地下停車場等應用場景下的智能駕駛技術研究,整車測試累計里程超過5萬公里。未來,智能駕駛技術將覆蓋上汽集團榮威、名爵、大通三大自主品牌。上汽集團將率先推出一款自主品牌智能駕駛量產車型,將實現“最后一公里”自主泊車等特定場景下的智能駕駛功能。
上汽在車聯網、單車智能、高精地圖、自動駕駛等方面均有全面布局。
單車智能方面:高精地圖與國內的一家眾包高精地圖項目Momenta、硅谷的高精地圖DeepMap合作,另一方面18年9月28日,收購武漢的高精度地圖公司光庭信息科技,這是一家汽車電子領域的老牌地圖供應商。芯片和攝像頭傳感器方面,與英特爾和Mobileye技術開發合作。
車聯網方面:上汽正在和華為、中移動合作5G技術的開發,力圖在美國的DSRC之外,打造中國的車聯網通訊協議。
目前上汽已經完成兩代智能駕駛整車平臺開發,以及集成5G通訊技術的車聯網平臺,構建了全自主知識產權的智能駕駛系統開發能力。
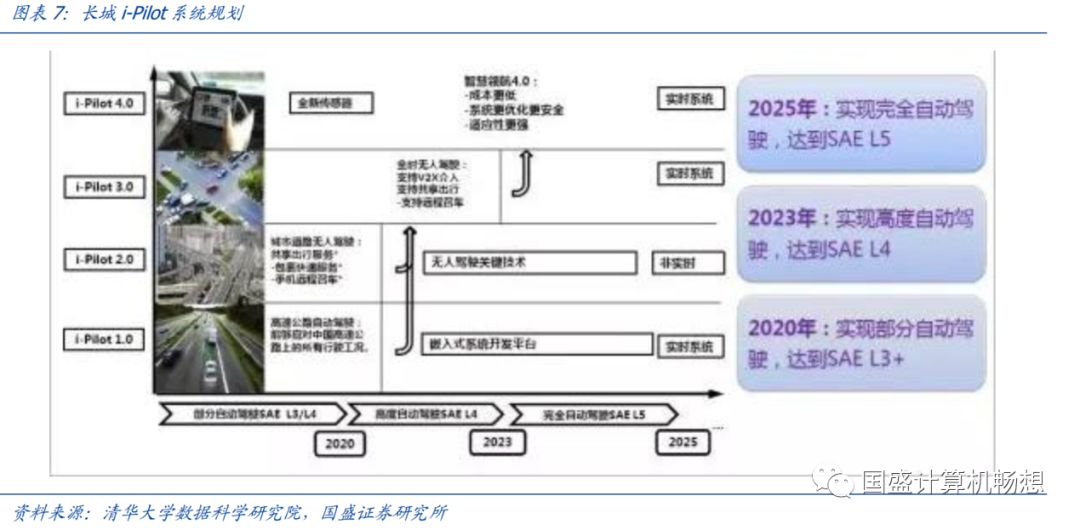
長城:i-pilot,2018年L2,2020年L3
長城汽車從2009年開始進行駕駛輔助系統研究,繼而開展自動駕駛技術研究,至今已有近10年的積累。2017年2月,長城汽車正式發布專門針對中國路況進行特定設計的i-Pilot自動駕駛系統。這是一個全新開放式、集軟硬件一體的智能駕駛平臺, i-pilot1.0系統基于高精度地圖,可滿足城市高速公路為特定場景,它不僅能夠在高速公路上進行正常駕駛,同時還可以應對一些異常狀況,包括路面破損以及堵車修路等,據稱能夠達到SAE規定的L3級別。據了解,i-pilot系統分為7個模塊,除了傳感器是采購供應商的產品以外,數據融合、智能決策,運動控制,AMI這些都由長城汽車自主研發設計,這其中還包括一塊系統管理模塊和系統監控模塊。同時,長城汽車和百度將進行開放性合作,發揮各自技術優勢,實現長城汽車i-Pilot和百度Apollo平臺深度對接,聯合打造開放性、符合車規級別的自動駕駛系統軟硬件一體化應用平臺。
目前,i-Pilot 1.0的樣車已經在國內進行超過50萬公里的實路測試;基于i-Pilot 2.0研發的樣車,已經獲得美國密歇根州無人駕駛測試牌照,并在北美開展實際道路測試。對于長城汽車而言,實現無人駕駛目標是循序漸進的2020年,實現部分自動駕駛,達到L3+級別,2023年實現高度自動駕駛,達到L4級別,2025年實現完全自動駕駛,達到L5級別。
各個功能目前滲透率究竟如何?
我們采用爬蟲對目前燃油車2872個車型進行了配置抓取,重點分析目前自動駕駛單項必備功能當前的車型滲透率。發現未來各項配置將向低價車市進行滲透。
盲區監測整體車型滲透率為17%
統計下來,配備盲區監測功能的車型共計488個,滲透率為17%,其中標配為457個,選配為32個。
1、從價格區間來看,5-10萬、10-20萬、20-30萬、30-40萬、40萬以上的車型占比分別為1.63%、35.31%、32.45%、11.63%、18.98%,因此從車型滲透率來看,目前盲區監測的主要價位區間在10-30萬元之間。
2、各個價位的滲透率來看,5-10萬、10-20萬、20-30萬、30-40萬、40萬以上各個價位區間,盲點監測車型占比分別為1.2%、12.92%、33.13%、30.16%、56.02%。
從滲透率可以看出來,目前40萬元以上級別車配置比例最高,而10-20萬元區間車型比例雖多,但滲透率依然較低。因此未來低級別車型的滲透率占比提升空間最大。
從選配的價格來看,選配主要出現在20萬元以上的部分車型,選配的比例為6.56%,選配主要集中在奧迪、寶馬、捷豹等車型,而從選裝價格來看,盲點監測選配價格在5000-7000元之間。

車道保持整體車型滲透率為17.2%
配備車道保持功能的車型共計493個,滲透率為17.17%,其中標配為458個,選配為35個。
1、從價格區間來看,5-10萬、10-20萬、20-30萬、30-40萬、40萬以上的車型占比分別為1.01%、32.45%、25.37%、19.47%、20.69%。
2、從各個價位的滲透率來看,5-10萬、10-20萬、20-30萬、30-40萬、40萬以上各個價位區間,車道保持車型占比分別為0.75%、11.95%、27.08%、50.79%、61.45%。
從滲透率可以看出來,目前40萬元以上級別車配置比例最高,且滲透率隨價格提升而提升。未來向低級別車型滲透為大勢所趨。
從選配的價格來看,選配主要出現在30萬元以上的部分車型,選配的比例為7.1%,選配主要集中在奧迪、寶馬、大眾等車型,而從選裝價格來看,車道保持價格不一,價位區間在4600-9000元之間。

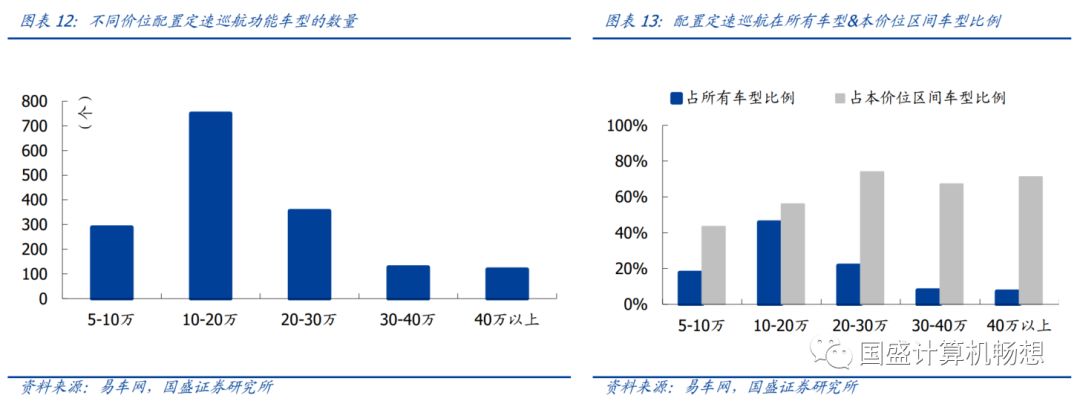
定速巡航整體車型滲透率已經達到了68.5%
配備定速巡航功能的車型共計1968個,滲透率為68.5%。
1.從價格區間來看,5-10萬、10-20萬、20-30萬、30-40萬、40萬以上的車型占比分別為17.63%、45.76%、21.66%、7.75%、7.20%。
2.從各個價位的滲透率來看,5-10萬、10-20萬、20-30萬、30-40萬、40萬以上各個價位區間,定速巡航車型占比分別為43.46%、56.01%、73.96%、67.2%、71.08%。
從滲透率可以看出來,目前20萬元以上級別車基本都已經大范圍配置,定速巡航主要發展空間都在20萬元以下車型。選配價格主要在2000元左右。我們認為,定速巡航經過十多年的發展到達了目前階段,可以認為是中長期各項配置滲透率的穩態表現。
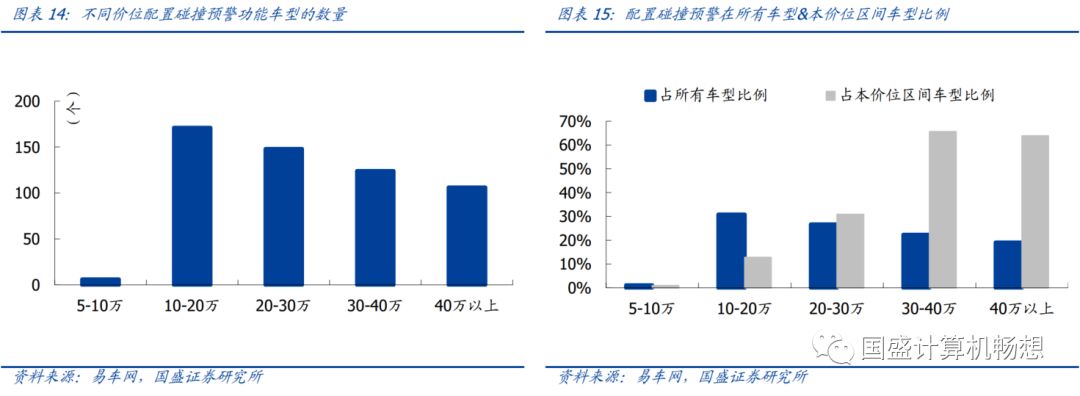
碰撞預警整體車型滲透率19.32%
配備碰撞預警功能的車型共計555個,滲透率為19.32%,其中標配為458個,選配為35個。
1.從價格區間來看,5-10萬、10-20萬、20-30萬、30-40萬、40萬以上的車型占比分別為1.08%、30.81%、26.67%、22.34%、19.10%。
2.從各個價位的滲透率來看,5-10萬、10-20萬、20-30萬、30-40萬、40萬以上各個價位區間,碰撞預警車型占比分別為0.9%、12.77%、30.83%、65.61%、63.86%。從滲透率可以看出來,目前30-40萬元以上級別車配置比例最高,未來向低級別車型滲透為大勢所趨。
從選配的價格來看,選配主要出現在30萬元以上的部分車型,選配的比例為7.6%,選配主要集中在奧迪、寶馬等車型,而從選裝價格來看,碰撞預警選裝價格不一,但主要碰撞預警價位在3000元左右。
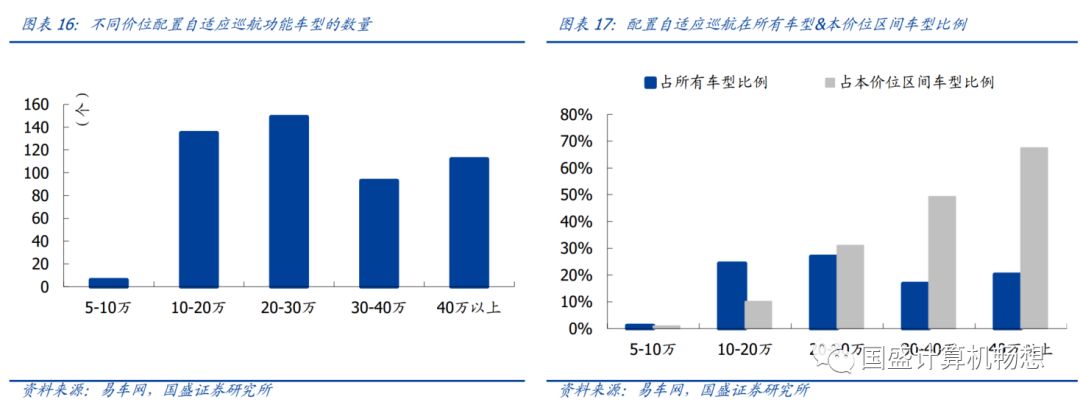
自適應巡航整體車型滲透率17.24%,且選配比例較高
配備自適應巡航功能的車型共計495個,滲透率為17.24%,其中標配為330個,選配為165個。
1.從價格區間來看,5-10萬、10-20萬、20-30萬、30-40萬、40萬以上的車型占比分別為1.08%、30.81%、26.67%、22.34%、19.10%。
2.從各個價位的滲透率來看,5-10萬、10-20萬、20-30萬、30-40萬、40萬以上各個價位區間,自適應巡航車型占比分別為0.9%、10.08%、31.04%、49.21%、67.47%。從滲透率可以看出來,目前40萬元以上級別車配置比例最高,未來向低級別車型滲透為大勢所趨。
從選配的價格來看,選配主要出現在豪華車奧迪、奔馳、寶馬、捷豹路虎,選配的比例為33.3%,而從選裝價格來看,自適應巡航選裝價格不一在9800-18000元之間。
從三個維度理解未來滲透率的繼續提升
1、從政策規劃角度理解空間的可靠性,根據發改委《智能汽車創新發展戰略(征求意見稿)》中規劃,到2020年,智能汽車新車占比超過50%,而根據附注可以理解,智能汽車新車主要指L2級別。而工信部到2020年,L2級別新車占比達30%。結合來看,2020年新車占比至少要達30%以上。而L2級別車輛至少需要配置的自適應巡航、車道保持功能占比目前僅為17%左右,兩者具備兩種配置的車型僅為252個,車型占比僅為8.77%。我們估算目前同時具備L2硬件功能的銷量占比不到10%,19-20年有一倍以上滲透率的提升。
2、從產品端理解滲透率提升的必然性,L2已經開始大幅提升產品的競爭力。自主品牌在18年陸續開始推出L2級自動駕駛量產車型,涵蓋了主流主機廠,包括吉利、上汽、長安、長城等,標志著國內L2級別自動駕駛技術的成熟,而CS75、繽越等在低迷的車市下形成月銷破萬的爆款,表明L2確實在提升產品競爭力。下一步是跟隨各個主流自主品牌進行大規模鋪開,與此同時可以看到,合資品牌也開始推出自己的L2級別車輛進行卡位,比如一汽大眾途岳、凱德拉克的CT6。
3、從提升結構來看,低級別車市是主要增長空間。未來主要的提升幅度來自于30萬以下的新車。根據前文統計,自適應巡航目前在30萬以下車型的配置僅為11.67%,車道保持在30萬以下車型的配置僅為11.88%,與此相對的是自適應巡航與車道保持在30萬以上車型中的滲透率為57.75%和55.77%。因此未來結構性的增長一定是來自于30萬以下級別車市。
產業鏈快速擴容的前夜
恰如前文所述,行業的擴容已成必然趨勢,且必然是由30萬以上級別的車輛向30萬以下級別車輛的滲透,因此這個過程中需要實現降本。而行業在19年將迎來新玩家的介入,打破現有海外供應商壟斷的,未來2-3年是供應商擴容國產化替代的快發發展階段。
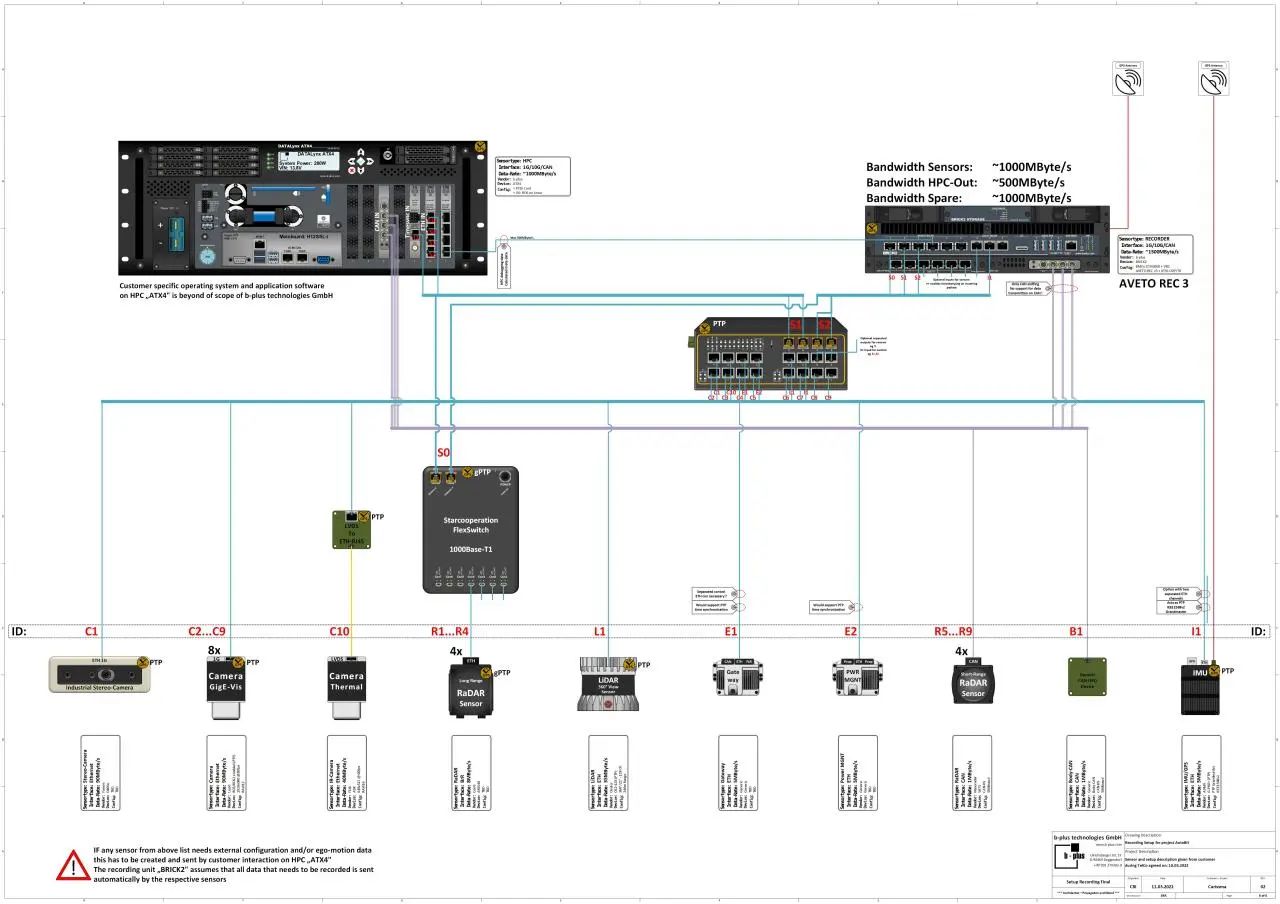
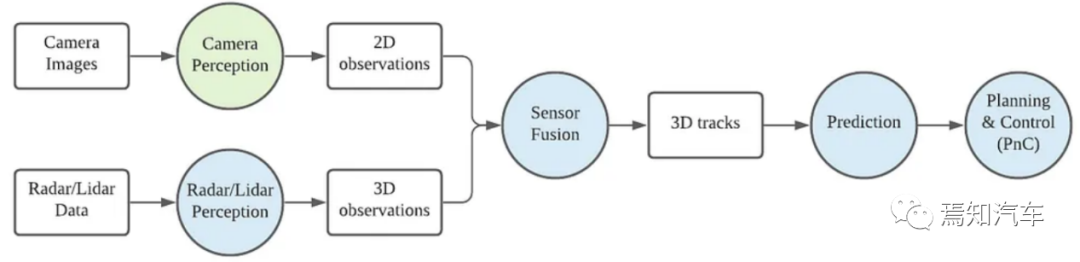
自動駕駛技術分為感知、決策、執行三個部分
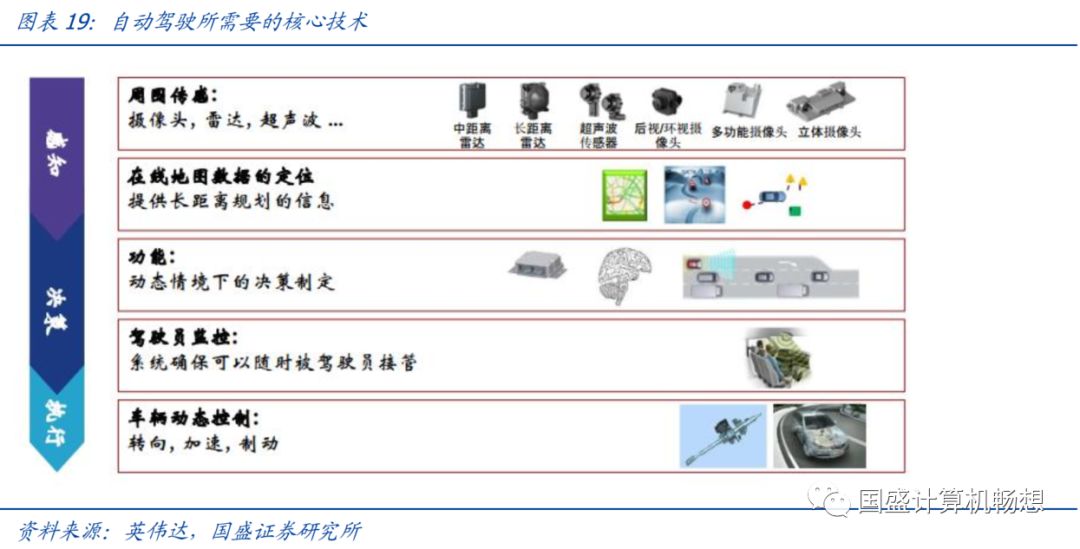
從產業鏈來看,自動駕駛的核心可以分為三個層級:感知、決策、執行
1、感知層主要是用于獲取周圍的信息,分為周圍傳感和定位兩部分,周圍傳感包含了攝像頭、雷達、超聲波傳感器、加速度傳感器等,定位主要是指采用(高精)地圖而進行規劃。
2、決策層主要是通過感知層的信息對車輛的形態進行決策。
3、執行層主要是在決策層之后對車輛的轉向、加速、制動進行操作。
由于L2級別的自動駕駛是在單一的ADAS基礎上改進而來,因此海外的供應商具備先天優勢,目前也基本壟斷了整個行業,具有較強的話語權,定價較高。未來隨著L2級別自動駕駛向低級別車市快速滲透,我們認為整個行業在未來的兩年將有出現國產替代邏輯,打破現有國際巨頭壟斷地位。
1、從量產落地角度,從2018年起,部分國內硬件供應商,目前已經開始自建工廠以實現產品量產,軟件以及算法公司也在布局應用落地,考慮到國內多數主機廠計劃在2020年實現L3及更高的自動駕駛,則2019-2020年會是大批零部件和解決方案提供商量產&商業化落地的一年。
2、從培育角度,對于國內自動駕駛的創業公司來說,經過三四年的巨額融資,已經到了驗證成果、證明自己商用潛力的時期。
自動駕駛各個關鍵環節已經出現部分國產供應商。
1、傳感器:隨著L3及以上自動駕駛的實現,傳感器的需求也將加大,根據網絡公開信息,18年達成小規模量產的毫米波雷達公司就有德賽西威、豪米波、行易道、安智汽車等。
2、高精地圖:對于L3及以上級別自動駕駛,高精地圖是必備的,目前老牌圖商進展更為穩健,高德、百度、四維圖新等均已獲得整車廠訂單;同時創業公司也紛紛計劃將于2018年底到2019年發布第一張高精地圖并實現商業化。
3、芯片領域:國內如地平線、華為均已推出L3/L4級自動駕駛計算平臺,四維圖新的MCU芯片也已計劃量產。
傳感器是汽車電子的重要延伸:在自動駕駛技術來臨之前,車用傳感器,即用于汽車電子技術、作為車載電腦(ECU)的輸入裝置,能夠將發動機、底盤、車身各個部分的運作工況信息以信號方式傳輸給車載電腦,從而使汽車運行達到最佳狀態。隨著ADAS技術的發展,多種傳感器開始融合共同使用。

未來方案提供商的崛起將帶來更多國產化機會
視覺方案提供商指的是通過接收傳感器信號之后進行算法處理的供應商,是感知層的集合。目前感知層中使用最多的是攝像頭,相對于其它傳感器,攝像頭的價格相對低廉,能夠完成識別車道線、車輛、人物等基礎能力,在汽車高級輔助駕駛市場已被規模使用。依據不同的圖像檢測原理,可分為單目攝像頭和雙目攝像頭,根據芯片類型又可分為CCD攝像頭和CMOS攝像頭等。
自動駕駛視覺所需的工業攝像頭在技術層面相對成熟,具有較高的圖像穩定性、高傳輸能力和抗干擾能力,且單個攝像頭成本目前已降到百元,因此單車在攝像頭的使用上可以配備6~8個攝像頭覆蓋不同角度。

攝像頭應用的最佳場景為輔助駕駛:以自動駕駛為著力方向的視覺方案供應商中,目前大多仍集中將產品應用于輔助駕駛環節,分布在前裝、后裝市場,為自動駕駛研發收集數據,不過用于ADAS的視覺算法一般僅能實現對車道線、周邊車輛的基礎感知功能,不能完全滿足自動駕駛要求,主要是因為攝像頭對光線的依賴使其無法全天時(如夜晚)全路況(如隧道)工作,需要其他傳感器作為補充。
國內的視覺方案供應商:大多數從ADAS起家,大部分成立于2013-2015年。商湯科技、格靈深瞳是少數打造計算機視覺通用平臺并參與到自動駕駛領域的AI公司。
國外的的視覺方案供應商:以色列的Mobieye為代表占整個市場大部分份額,目前已經形成了芯片、雷達等一體化生產。

目前國內的創業企業,已經通過3-4年的培育期以及A輪B輪融資,進入量產收獲階段。以其中的縱目科技為例,縱目科技于2015年11月進入了小批量量產車階段,而在2016年9月,已經有十幾款搭載縱目科技產品的車型進入小批量量產。而2017年環視ADAS系統產品的第一款產品在2017年進入量產車型吉利-博越。截止目前,縱目科技產品已經成為數十家國內整車廠的視覺解決方案提供商。

毫米波雷達:被國外Tier1壟斷,國產化在即
毫米波是指頻率位于30GHz到300GHz之間的電磁波。近些年,隨著毫米波雷達技術水平的提升和成本的下降,毫米波雷達開始應用于ADAS,并成為自動駕駛所需的傳感器。當前主要的毫米波段為24GHz,77GHz,79GHz是未來發展方向。檢測距離和距離分辨率是衡量車載雷達性能的要素;相比于毫米波雷達市場主流的24GHz、77GHz雷達,下一 代產品79GHz雷達兼具遠測距和高分辨率的特點。77GHz是當前車載毫米波雷達的主要使用頻段,24GHz雷達嚴格意義上處于厘米波段,但在特性上接近毫米波雷達,因而也被歸類入其中。

毫米波最大優勢在于可以彌補攝像頭的不足,精度較高,穿透霧、灰塵的能力強,能夠全天候全天時工作。不過,毫米波易受干擾,而且難以識別小的物體(會發生衍射現象,無法接收到反射線)。
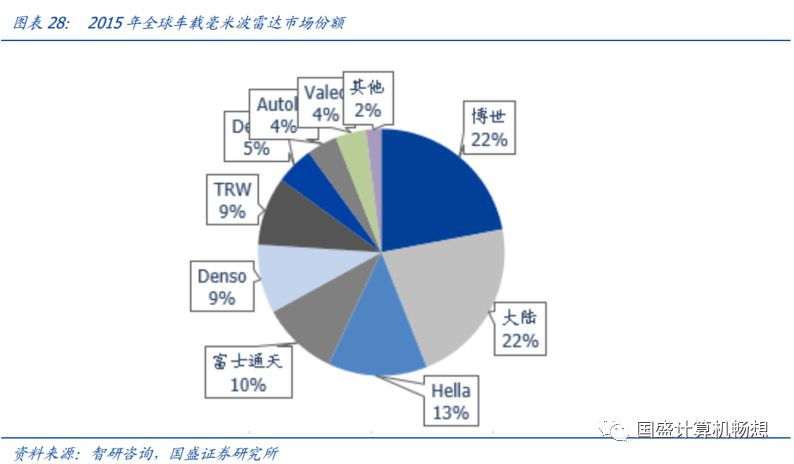
目前國內毫米波雷達基本均由國外廠商壟斷,博世、大陸、Hella、電裝、德爾福占了市場上幾乎所有的份額。
2018年,國內各個企業已經可以看到量產毫米波雷達出現了突破。
上市公司中:
德賽西威:24GHz毫米波雷達量產,從18年11月起給電咖提供360環視系統和后側毫米波雷達。
華域汽車:國內最早宣布進行24G雷達研發。
保隆科技:毫米波雷達在研,進入設計驗證階段。
其他非上市公司中,森思泰克、安智杰、蘇州豪米波、行易道已經進入了量產階段,且獲得主機廠小批量定點。

而根據智研咨詢的預測,到2020年,車載毫米波雷達的市場空間將是目前三倍。

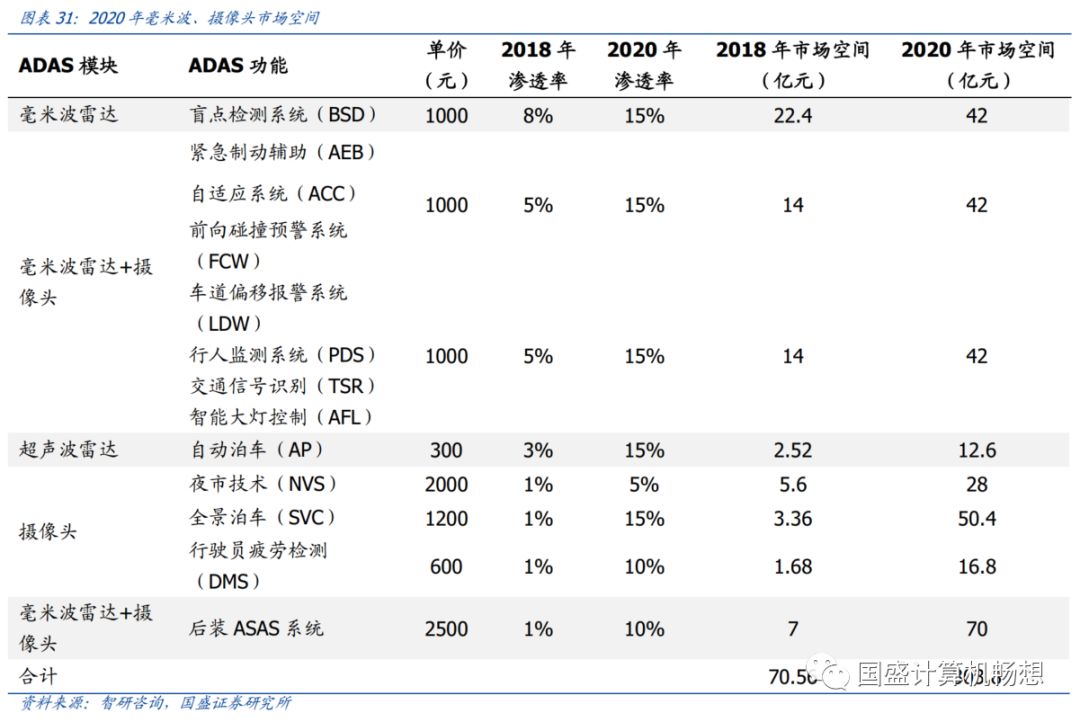
這個過程中,建議關注目前已經量產毫米波雷達且給電咖供貨的德賽西威、最早研發的華域汽車、在研的保隆科技。
智能座艙:景氣加速
智能網聯汽車為國家戰略,智能車載市場蓬勃發展。中國于2015年發布《中國制造2025》,將智能網聯汽車提升到國家戰略的高度。2016年發布《智能網聯技術路線圖》,政策持續推動汽車智能化的快速發展。2018年1月國家發改委公布《智能汽車創新發展戰略》提出目標:到2020年,我國智能汽車新車占比達50%,中高級別智能汽車實現市場化應用;2025 年,新車基本實現智能化,高級別智能汽車規模化應用。
在中國市場,目前智能網聯汽車滲透率較低。隨著政策推動、需求上升,車聯網技術市場將持續蓬勃發展,細分領域也將紛紛受益。智能車載作為產業鏈中的核心,預計相關技術和產品會快速增長。目前車載終端以前裝為主體,據SBD預測,2018年中國前裝車載終端(嵌入式)規模達到499 萬臺,同比增速達34.1%。
智能駕駛艙是智能網聯汽車的發展方向。隨著汽車智能網聯程度日益加深,智能汽車概念已經不僅僅局限于車載信息系統,目前業內最新發展方向為打造智能化、虛擬化的智能駕駛艙,智能駕駛艙(又稱汽車座艙)主要包含了儀表盤、抬頭顯示HUD、車載信息終端、車內外后視鏡等載體,以及語音控制、手勢操作、車聯網等智能化的交互方式,是人-車交互的重要樞紐,可以為汽車打造一個擁有多種顯示方式和交互方式,且具有對車內外環境具有感知與反饋能力的操作系統,將成為汽車駕駛艙下一個顛覆式的創新點。

智能駕駛艙快速向中低端車型滲透,大眾化有望快速開啟。近年來,在整車廠商、零部件巨頭、互聯網車企的共同參與下,智能駕駛艙正快速向前推進。車企為了增強自身車型的差異化競爭能力,逐漸將智能駕駛艙從豪華車型向入門車型滲透。新能源汽車和智能汽車的快速發展也在刺激智能駕駛艙滲透率快速提升。同時,技術的進步和成本的降低,使得智能駕駛艙的大眾化趨勢不斷加強。2017年智能駕駛艙的滲透率中,中控屏幕滲透率已經達到70%,液晶儀表、HUD等功能的滲透率正處于加速發展的態勢。預計2020年液晶儀表和車聯網模塊的滲透率將達到30%。2017-2020年智能駕駛艙的復合增長率超過20%,其中液晶儀表的復合增長率可達40%。

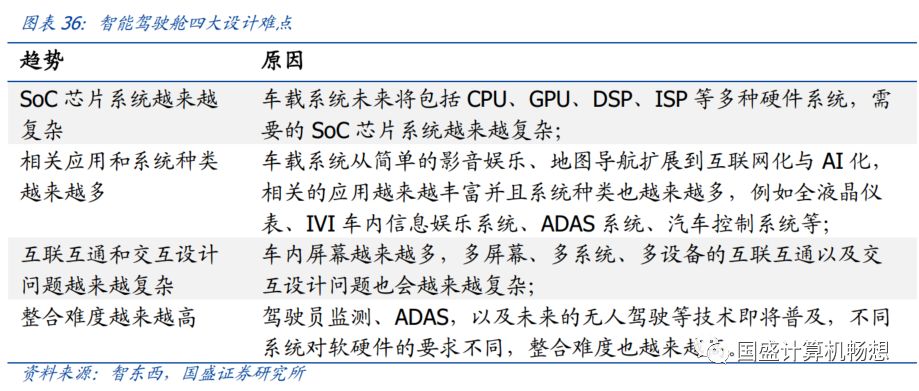
智能駕駛艙涉及多項設計與研發挑戰,傳統車廠和Tier1需與第三方強強聯手。隨著技術的不斷增加與融合,智能駕駛艙設計的軟硬件挑戰也越來越多,智能駕駛艙的設計難點包含四點:1)、SoC芯片系統越來越復雜;2)、相關應用和系統種類越來越多;3)、互聯互通和交互設計問題越來越復雜;4)、整合難度越來越高。
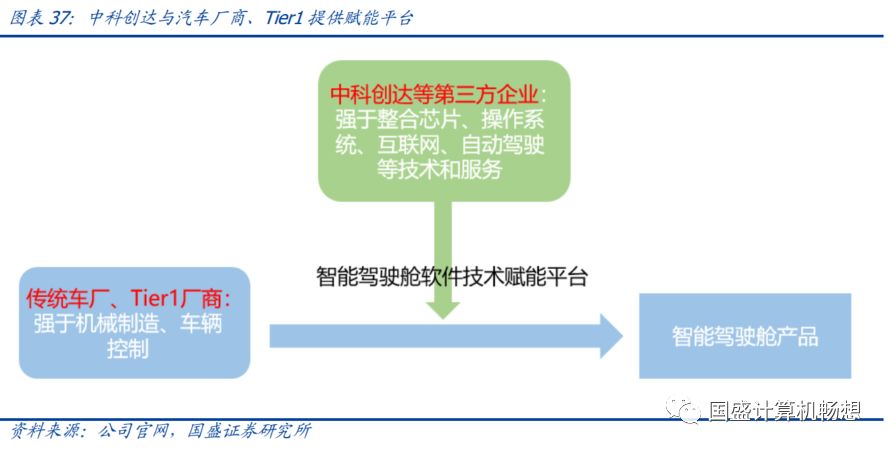
傳統車廠、Tier1廠商強于機械制造、車輛控制;而中科創達等第三方企業強于整合芯片、操作系統、互聯網、自動駕駛等技術和服務。因此傳統車廠、Tier1廠商需要第三方企業為其提供一個便捷、完整的智能駕駛艙開發平臺,從而能夠在此基礎上迅速進行個性化定制開發。中科創達為汽車廠商和Tier1提供智能駕駛艙軟件技術賦能平臺。汽車廠商和Tier1可借助中科創達智能駕駛艙平臺快速提升智能汽車的品質和用戶人機交互體驗,同時大大縮短產品上市時間。
中科創達:內生外延并重,車載信息娛樂系統&智能座艙領導者
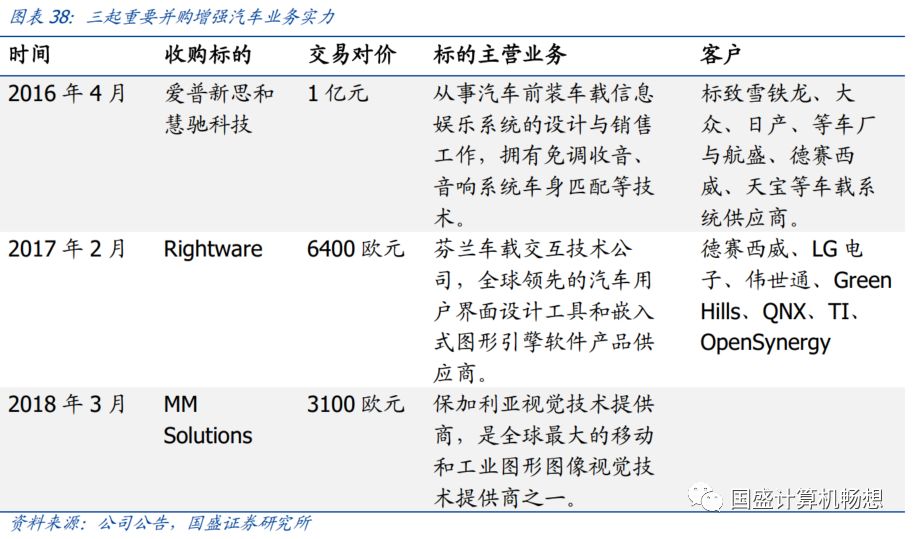
外延獲取技術和資源,三起并購增強汽車業務實力。2013年,中科創達從操作系統領域的抽調部分人員并招募汽車人才后,正式進軍智能汽車領域。得益于公司在Linux、安卓等領域的技術積累,公司移植基于智能手機業務的技術再應用于智能汽車中。2016年-2018年期間,公司相繼并購愛普新思和慧馳科技、Rightware、MM Solutions,獲取了其技術和客戶資源,大幅增強公司汽車領域的實力。
兩起收購獲得人機交互系統兩塊屏幕。2016年4月,公司收購從事汽車前裝車載信息娛樂系統的兩家兄弟公司愛普新思和慧馳科技;2017年2月,公司收購芬蘭車載交互技術公司。這兩起收購一方面為中科創達帶來了車載信息娛樂系統和車內UI設計軟件的開發、配套技術和經驗,公司同時擁有人機交互系統的兩塊屏幕——中控數字儀表盤屏幕和車載娛樂信息系統屏幕,充分卡位人機交互系統的第一入口;兩塊屏幕能夠集成為一套底層系統和解決方案,提高公司的業務服務能力,加深智能汽車產業鏈的戰略布局。;另一方面也為其帶來了標致雪鐵龍、大眾、日產、奧迪、奔馳、捷豹路虎,以及航盛、德賽西威等一系列現有的汽車產業客戶,全面提升公司汽車業務的實力。
收購MMS獲得圖像視覺技術。此外, 2018年3月公司以3100萬歐元(約合2.4億人民幣)收購MM Solutions100%的股權。MM Solutions是全球最大的移動和工業圖形圖像視覺技術提供商之一,中科創達通過將其技術進行融合吸收,推出針對汽車的360度環視、障礙物檢測、駕駛員狀態檢測等ADAS高級駕駛輔助系統。
產品持續升級換代,每隔半年推出智能駕駛艙新品方案。中科創達的智能駕駛艙解決方案一直持續迭代升級,不斷推出新品,時刻保持技術前沿。僅以2018年后為例,公司每隔半年都會推出全新的智能駕駛艙解決方案:2018年1月9日,公司發布全球首款基于Qualcomm?Snapdragan?820A平臺QNX Hypervisor2.0智能駕駛艙解決方案;2018年6月13日,公司在CES Asia上首發數字液晶儀表、中控娛樂、副駕娛樂、方向盤遠程控制、空調座椅控制、移動終端“六屏融合”的智能駕駛艙2.1解決方案;2019年1月8日,公司與高通合資公司——創通聯達(ThunderComm)在拉斯維加斯發布了最新的基于第三代Qualcomm? 驍龍?汽車數字座艙平臺的智能駕駛艙解決方案——ThunderComm? TurboX Auto?;2019年1月9日,公司在CES上全球首發AI+智能駕駛艙2.5解決方案。

AI+智能駕駛艙2.5解決方案融合了中科創達先進的操作系統和人工智能技術、以及Rightware Kanzi?3D開發技術,支持Qualcomm? Snapdragon?、瑞薩R-Car、Intel Apollo Lake平臺、i.MX8和Android O、QNX?、Linux系統,創新地實現了包括Cluster、IVI、RSE、HVAC、HUD、DMS的一芯多屏多系統技術架構。方案通過人臉識別、駕駛員狀態監測和手勢識別等中科創達人工智能技術,以及Rightware Kanzi?3D開發技術,全面提升智能汽車品質和用戶人機交互體驗。

高精地圖:資質加先發優勢,雙重護城河
傳統的導航地圖以描述性為主,用來定量的內容較少,在精度、維度、信息量上都無法滿足L3及以上自動駕駛額需要。因此在目前階段,各個整車廠都開始在高精地圖方面做積極的布局,為2020年起的L3浪潮做準備。
高精地圖可以認為是建立一張地圖的絕對坐標,精度更高,交通信息元素豐富,能夠為定位和路徑規劃提供精細依據,是感知層除傳感器以外的另一重要核心,是整體解決方案中不可替代的關鍵部分。

資質是國內高精地圖供應商的第一重護城河
高精地圖并非是任何一個企業都能隨繪制。根據國家測繪地理信息局2016年下發的《關于加強自動駕駛地圖生產測試與應用管理的通知》中規定:自動駕駛地圖(高精地圖)屬于導航電子地圖的新型種類和重要組成部分,其數據采集、編輯加工和生產制作必須由具有導航電子地圖制作測繪資質的單位承擔。
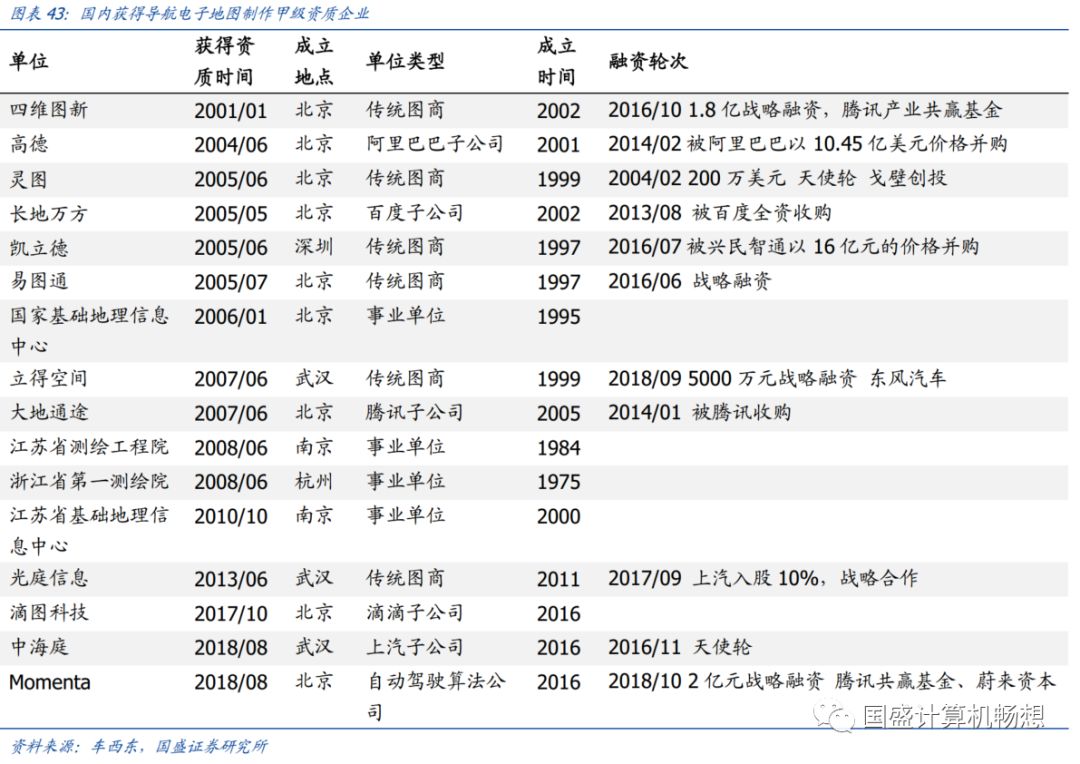
而導航電子地圖制作(甲級)測繪資質發放條件較為苛刻,自2001年四維圖新獲得國家測繪地理信息局(當時名為國家測繪局)頒發的全國第一張導航電子地圖制作資質至今,18年的時間過去了,全國也僅有以下不到20家的單位拿到了這張通行證。
先發優勢是國內高精地圖供應商的第二重護城河
高精地圖的建立一般是采用眾包形式,使用傳感器進行道路數據采集并在后臺完成繪制。由于高精度地圖投入大、周期長的特性,也有以特征測繪這樣精度較低、相對簡易的技術方案建圖。按照方式的不同,可以分為輕重兩種地圖建模技術路線。
1、重地圖模式:通過GPS定位,用數據采集車(配備有激光雷達、攝像頭)作為地圖繪制源收集深度信息,經過后臺處理形成高精地圖。方案特點是使自動駕駛更依賴地圖信息。
2、輕地圖模式:使用車載攝像頭繪制某些能夠幫助實現車輛導航的特定道路特征(如固定的路邊設施)。該方式測繪精度一般,比較依賴傳感器,地圖處理更新較容易。Mobileye是該方案的代表。
我們認為相比于資質壁壘,圖商更為重要的在于先發優勢。高精地圖的測繪模式先天就決定了每個圖商需要進行繁瑣的人工道路測繪工作,這種優勢并非能夠在一朝一夕取的改變。而量產級的高精地圖更要能夠保證持續更新、規格不發生變化、持續穩定,這對整個公司的積累、運營提出了較高要求。以高德地圖和四維圖新為例:
1、高德自2014年取得測繪資質以來,高德通過“自主+眾包”的方式,已完成了28萬公里的全國高速高精度地圖靜態數據采集。18年底,高德還計劃向國省道和主要城市擴展自動駕駛級別數據。
2、四維圖新通過大量的采集車,分區域采集,在2017年覆蓋了全國25%的高速和少量市內路段。2018年完成了全國80%的高速測繪和擴大城市覆蓋范圍。2019年計劃完成100%的高速測試和1-2個城市的可商業化使用的城市測繪,2020年覆蓋更多城市。
也就是說頭部圖商通過4年左右的時間方能完成滿足商業化使用要求的高精地圖,鞏固其行業地位。并且通過免費提供給車廠的模式,獲得車主駕車時的地圖相關數據,使高精地圖具備實施更新的能力。
投資建議
我們認為L2級別的自動駕駛會在2019年開始大規模的量產,L3級別自動駕駛車輛也在2020年開始會陸續出現,在此過程我們認為有兩條線值得密切關注:
1、傳感器方面,目前為國外Tier 1壟斷的毫米波雷達領域,2018年起國內已經出現部分企業打破海外壟斷,開始小規模量產,建議關注德賽西威(360環視量產,毫米波雷達已經量產)、保隆科技(360環視系統已經量產,在研毫米波雷達處于驗證階段)、華域汽車。
2、高精地圖方面,具備資質與先發優勢雙重壁壘的頭部企業,19年起將是高精地圖逐步落地的階段,隨著后續L3車輛的逐步推出而進入收獲階段,建議關注四維圖新。
風險提示
1、宏觀經濟下行,整車銷量大幅低于預期。整車銷量與宏觀經濟結合比較緊密,如果宏觀經濟增長一旦未能達到預期,整車的銷量將大幅低于預期。一旦銷量大幅放緩,可能放緩整體的汽車行業智能化節奏。
2、國內政策放開地圖資質壁壘。目前高精地圖領域,國內要求圖商必須取得導航電子地圖制作(甲級)測繪資質,一旦國內政策放開整個地圖資質壁壘,則對整個高精地圖行業將產生較為顯著的影響。
3、海外供應商對硬件的降價幅度超預期。隨著越來越多的硬件開始進入國產化階段,將面臨外資降價保住市場份額的風險,而一旦外資降幅大幅超市場預期,將對國產化進程產生顯著壓制影響。
-
自動駕駛
+關注
關注
781文章
13449瀏覽量
165268 -
毫米波雷達
+關注
關注
105文章
1011瀏覽量
63987
原文標題:自動駕駛系列深度:L2級自動駕駛滲透率提升的前夜
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
Mobileye引領自動駕駛新紀元:L4級無人駕駛系統在德國成功路測
前圖森未來中國CTO王乃巖加入小米汽車,助力自動駕駛發展
未來已來,多傳感器融合感知是自動駕駛破局的關鍵
長安UNI-Z上市,定價11.79-13.19萬元,標配L2級自動駕駛系統
康謀方案 | L2進階L3,數據采集如何助力自動駕駛
自動駕駛感知算法提升處理策略
自動駕駛產業鏈爆發前夜?多家車企宣布已獲得L3級自動駕駛路測牌照

虹科方案丨L2進階L3,數據采集如何助力自動駕駛
【11月21日|直播】跨越L2到L4的鴻溝,測試怎樣助力自動駕駛







 工商網監
工商網監
評論