") 單芯片毫米波解決方案設(shè)計(jì)運(yùn)動(dòng)檢測系統(tǒng)
單芯片毫米波解決方案設(shè)計(jì)運(yùn)動(dòng)檢測系統(tǒng)
設(shè)計(jì)人員在設(shè)計(jì)運(yùn)動(dòng)傳感器時(shí)面臨著持續(xù)的競爭壓力。傳感器不僅要體積更小、更精確,并且還要在智能建筑、工廠自動(dòng)化、交通運(yùn)輸和無人機(jī)等多種行業(yè)應(yīng)用中具有更遠(yuǎn)的檢測范圍。雖然毫米波 (mmWave) 技術(shù)正逐漸成為一種極具吸引力的運(yùn)動(dòng)檢測選擇,但不熟悉毫米波技術(shù)的設(shè)計(jì)人員發(fā)現(xiàn),底層的雷達(dá)前端以及高性能信號(hào)鏈頗具挑戰(zhàn)性。
為解決這些問題,市面上現(xiàn)已推出毫米波器件及相關(guān)開發(fā)套件,使設(shè)計(jì)人員能夠快速部署復(fù)雜精確的運(yùn)動(dòng)檢測系統(tǒng)。
本文將討論運(yùn)動(dòng)檢測系統(tǒng)日益重要的作用,并解釋為什么毫米波是滿足范圍和精度需求的好選擇。然后將介紹一款合適的套件,并展示如何開始使用該套件。
運(yùn)動(dòng)檢測日益重要的作用
運(yùn)動(dòng)檢測功能在很多應(yīng)用中已變得越來越重要。除了為智能建筑和家居產(chǎn)品提供便利功能以外,運(yùn)動(dòng)檢測還可為汽車和工業(yè)應(yīng)用提供關(guān)鍵的安全功能。在越來越多的應(yīng)用中,擴(kuò)大檢測范圍以及提高檢測精度變得至關(guān)重要,以往基于無源紅外傳感器或飛行時(shí)間系統(tǒng)的傳統(tǒng)方法已不再適用。
因此,調(diào)頻連續(xù)波 (FMCW) 毫米波雷達(dá)技術(shù)受到越來越多的關(guān)注。此技術(shù)使用短波長信號(hào),能夠以亞毫米的精度檢測目標(biāo)。并且,還能穿透塑料、石膏板和衣物等材料,同時(shí)在下雨、起霧、灰塵和下雪等惡劣的環(huán)境條件下,還能保持其高性能。
緊密的毫米波能量束可以進(jìn)行聚焦和操縱,從而提供高度精確的目標(biāo)檢測,并且可在多個(gè)目標(biāo)彼此靠近移動(dòng)時(shí)對(duì)其進(jìn)行跟蹤。
毫米波技術(shù)的工作原理
雖然毫米波雷達(dá)信號(hào)處理的細(xì)節(jié)超出了本文的討論范圍,但檢測原理基于一個(gè)熟悉的概念,其中涉及目標(biāo)的能量反射。在線性 FMCW 雷達(dá)中,這種能量是一種稱為“啁啾”的毫米波音調(diào),其頻率隨時(shí)間呈線性變化。雷達(dá)系統(tǒng)產(chǎn)生并發(fā)射啁啾之后,會(huì)檢測順發(fā)射方向目標(biāo)反射的啁啾信號(hào)并將其傳遞給混頻器。混頻器會(huì)將 RX 和 TX 信號(hào)組合在一起,產(chǎn)生中頻 (IF) 信號(hào)。
啁啾傳輸與反射信號(hào)檢測之間的延遲,可用于計(jì)算雷達(dá)系統(tǒng)天線與目標(biāo)之間的距離。如果雷達(dá)系統(tǒng)在一個(gè)觀測窗口或幀中產(chǎn)生多個(gè)啁啾,則可通過測量相應(yīng)反射的啁啾中的相位差來確定某個(gè)目標(biāo)的速度。如果使用多個(gè)接收器,雷達(dá)系統(tǒng)還可確定雷達(dá)系統(tǒng)與目標(biāo)之間的相對(duì)到達(dá)角 (AoA)。通過使用這些相同的原理和更復(fù)雜的計(jì)算,高性能雷達(dá)系統(tǒng)可以跟蹤以不同速度和軌跡移動(dòng)的多個(gè)目標(biāo)。
若要設(shè)計(jì)能夠執(zhí)行這些操作的系統(tǒng),則需結(jié)合射頻、模擬和數(shù)字子系統(tǒng)(圖 1)。作為系統(tǒng)輸出信號(hào)鏈的組成部分,射頻信號(hào)合成器可產(chǎn)生用于傳輸?shù)倪薄T谙到y(tǒng)輸入信號(hào)鏈的第一級(jí),射頻混頻器可將產(chǎn)生的啁啾與反射的啁啾結(jié)合在一起,從而產(chǎn)生 IF 信號(hào)。在后續(xù)的模擬級(jí)中,低通濾波器和模數(shù)轉(zhuǎn)換器 (ADC) 可產(chǎn)生數(shù)字?jǐn)?shù)據(jù)流,以便利用快速傅里葉變換 (FFT) 和其他算法進(jìn)行信號(hào)處理。

圖 1:典型的毫米波調(diào)頻連續(xù)波 (FMCW) 雷達(dá)設(shè)計(jì)依靠緊密集成的射頻、模擬和數(shù)字子系統(tǒng),來傳輸精確控制的能量突發(fā)(稱為啁啾),并處理反射的信號(hào),從而解析靶場目標(biāo)的距離、速度和相對(duì)角度。(圖片來源:Texas Instruments)
盡管這種基本架構(gòu)適用于典型的 FMCW 雷達(dá)系統(tǒng),但其設(shè)計(jì)細(xì)節(jié)取決于最大檢測范圍、范圍分辨率,角度分辨率和其他應(yīng)用級(jí)要求。例如,最大檢測范圍與 IF 成正比,與頻率斜率成反比。因此,對(duì)于諸如汽車自適應(yīng)巡航控制之類遠(yuǎn)范圍應(yīng)用,設(shè)計(jì)既要能夠支持高 IF,又要能夠產(chǎn)生具有快速掃頻時(shí)間的啁啾。
如果設(shè)計(jì)人員希望優(yōu)化雷達(dá)性能,還必須處理許多設(shè)計(jì)特性,包括 TX 輸出功率、RX 靈敏度和噪聲系數(shù)、天線 TX 和 RX 增益外形幾何以及反射信號(hào)的信噪比。此外,每個(gè)應(yīng)用都有獨(dú)特的因素組合,這為開發(fā)人員帶來了一系列相互依存的復(fù)雜要求。
Texas Instruments 依托其毫米波平臺(tái),可幫助設(shè)計(jì)人員擺脫雷達(dá)系統(tǒng)設(shè)計(jì)和配置的諸多挑戰(zhàn)。
單芯片毫米波解決方案
Texas Instruments 的毫米波解決方案結(jié)合了毫米波 IC 和全面的軟件環(huán)境,可極大地簡化基于毫米波的運(yùn)動(dòng)檢測器應(yīng)用的實(shí)現(xiàn)。工業(yè)毫米波器件(包括 Texas Instruments 的IWR1443和IWR1642)集成了所需的全套射頻、模擬和數(shù)字子系統(tǒng),用來產(chǎn)生、傳輸、接收和處理 FMCW 雷達(dá)信號(hào)。這些器件將類似的射頻/模擬前端以及復(fù)雜的數(shù)字子系統(tǒng)結(jié)合在一起(圖 2)。在這種前端架構(gòu)中,這些器件集成了一個(gè)完整的 FMCW 76 - 81 千兆赫 (GHz) 頻段收發(fā)器子系統(tǒng),具有四個(gè)專用 RX 信號(hào)路徑和多個(gè) TX 通道(IWR1443 有三個(gè),IWR1642 有兩個(gè))。
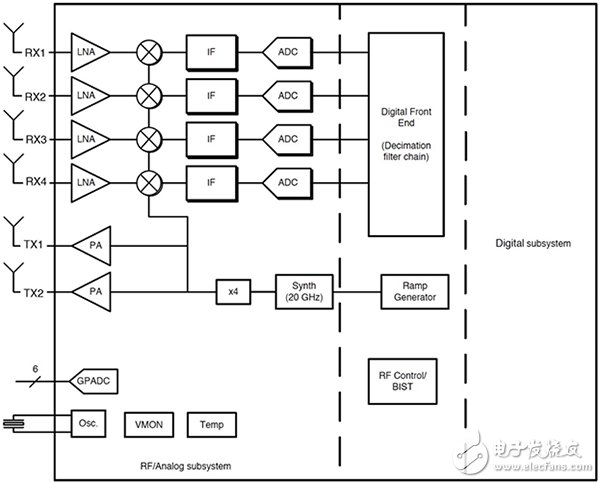
圖 2:Texas Instruments 的 IWR1443 和 IWR1642 毫米波器件具有類似的前端架構(gòu),可提供四個(gè)獨(dú)立的 RX 通道和多個(gè) TX 通道(IWR1443 有三個(gè)通道,IWR1642 有兩個(gè)通道)。(圖片來源:Digi-Key Electronics,使用 Texas Instruments 提供的原始資料)
對(duì)于其數(shù)字子系統(tǒng),這兩款器件都集成了 Arm? Cortex?-R4F 處理器內(nèi)核,該內(nèi)核作為主控制系統(tǒng)中的設(shè)備主機(jī),負(fù)責(zé)設(shè)備外設(shè)、固件更新、啟動(dòng)和其他主機(jī)功能。該主控制系統(tǒng)使用集成的 ROM 和程序/數(shù)據(jù)存儲(chǔ)器,主要作用是使 TI 毫米波器件能夠在更大的系統(tǒng)設(shè)計(jì)中自主運(yùn)行。
對(duì)于其集成的雷達(dá)處理子系統(tǒng),兩款器件均采用基于 128 位、200 兆赫 (MHz) 總線構(gòu)建的類似架構(gòu),可在共享的存儲(chǔ)器資源(包括 ADC 緩沖器、雷達(dá) L3 數(shù)據(jù)存儲(chǔ)器、緩存和存儲(chǔ)器)之間提供高速數(shù)據(jù)傳輸,從而實(shí)現(xiàn)與主控制系統(tǒng)主機(jī)的通信。連接到同一總線的增強(qiáng)型 DMA (EDMA) 模塊可提供獨(dú)立于處理器的傳輸,從而加快通過各級(jí)處理管線進(jìn)行數(shù)據(jù)傳輸。
對(duì)于其雷達(dá)信號(hào)處理子系統(tǒng),IWR1443 和 IWR1642 使用了兩種不同的方法。IWR1443 配有一個(gè)專門的加速器,用于加速 FFT 計(jì)算和雷達(dá)信號(hào)處理所需的其他計(jì)算(圖 3)。此外,獨(dú)立的 Arm Cortex-R4F 處理器(雷達(dá)系統(tǒng))可作為用于前端配置、雷達(dá)子系統(tǒng)控制和校準(zhǔn)的專用主機(jī)。

圖 3:除射頻和模擬前端外,Texas Instruments 的 IWR1443 毫米波器件還集成了一個(gè)數(shù)字子系統(tǒng),其中包括一個(gè)基于 Arm Cortex-R4F 的主控制系統(tǒng)、一個(gè)基于 Arm Cortex-R4F 的獨(dú)立雷達(dá)系統(tǒng),以及一個(gè)用于加速雷達(dá)信號(hào)處理的 FFT 加速器。(圖片來源:Texas Instruments)
IWR1642 集成了 Texas Instruments 的 C674x 數(shù)字信號(hào)處理器 (DSP) 內(nèi)核(圖 4),作為其雷達(dá)信號(hào)處理器。IWR1642 DSP 專為 FMCW 信號(hào)處理而設(shè)計(jì),采用 600 MHz 運(yùn)算時(shí)鐘頻率,支持 32 KB 的 L1 程序 (L1P) 和數(shù)據(jù) (L1d) 緩存,以及可加速 DSP 運(yùn)算的 256 KB 統(tǒng)一程序/數(shù)據(jù) L2 緩存。如有必要,開發(fā)人員可以嚴(yán)格將 IWR1642 用作雷達(dá)信號(hào)處理器。

圖 4:除射頻/模擬前端外,Texas Instruments 的 IWR1443 毫米波器件還集成了一個(gè)數(shù)字子系統(tǒng),包括一個(gè)用作主控處理器的 Arm Cortex-R4F ,以及一個(gè)用于處理雷達(dá)信號(hào)的 Texas Instruments C674x 數(shù)字信號(hào)處理 (DSP) 內(nèi)核。(圖片來源:Texas Instruments)
由于主控制和雷達(dá)子系統(tǒng)配備了硬件在環(huán) (HIL) 模塊,因此能夠讓開發(fā)人員使用器件的數(shù)據(jù)修改模塊 (DMM) 輸入端口來繞過射頻前端,并將原始雷達(dá)數(shù)據(jù)加載到 IWR1642 中進(jìn)行信號(hào)處理。
雷達(dá)信號(hào)處理鏈
盡管 IWR1443 的硬件加速器或 IWR1642 的 C674x DSP 內(nèi)核的選擇取決于每個(gè)應(yīng)用的獨(dú)特要求,但所選器件在應(yīng)用中的運(yùn)行對(duì)大多數(shù)開發(fā)人員來說基本上是透明的。在 Texas Instruments 的毫米波解決方案架構(gòu)中,TI 毫米波軟件環(huán)境可以使用任一器件的資源來執(zhí)行功能模塊(稱為數(shù)據(jù)處理單元 (DPU)),這些模塊負(fù)責(zé)雷達(dá)信號(hào)處理中通常使用的單個(gè)數(shù)據(jù)轉(zhuǎn)換。在 TI 的毫米波 DPU 中,核心功能包括:
范圍 FFT:此功能可在活動(dòng)幀內(nèi)的數(shù)據(jù)采集期間讀取啁啾數(shù)據(jù),以產(chǎn)生用于范圍計(jì)算的一維 FFT,并生成雷達(dá)數(shù)據(jù)立方體。這是存儲(chǔ)在專用 L3 雷達(dá)數(shù)據(jù)存儲(chǔ)器中的范圍、啁啾和天線數(shù)據(jù)的三維 (3D) 矩陣。
靜態(tài)雜波消除:此功能可從樣本集中減去樣本的平均值。
多普勒 FFT:此功能可執(zhí)行 2D FFT 計(jì)算,以細(xì)化幀之間的雷達(dá)立方體數(shù)據(jù),并生成雷達(dá)目標(biāo)檢測算法使用的檢測矩陣。
CFAR:此功能執(zhí)行通常用于目標(biāo)檢測的恒虛警率 (CFAR) 算法。
CFAR 單元平均:此功能結(jié)合了 AoA 與 CFAR 模塊,可執(zhí)行雷達(dá)系統(tǒng)常用的 CFAR 單元平均 (CFAR-CA) 算法,以檢測噪聲背景下的目標(biāo)。
用于聚類、群組追蹤和分類的其他 DPU 可以為雷達(dá)信號(hào)數(shù)據(jù)的進(jìn)一步應(yīng)用提供具體改進(jìn)。
利用 TI 的毫米波軟件開發(fā)套件 (SDK),開發(fā)人員使用數(shù)據(jù)路徑管理器 (DPM) 應(yīng)用編程接口 (API) 調(diào)用,可將不同的 DPU 結(jié)合到所需的檢測(或數(shù)據(jù))處理鏈 (DPC) 中。例如,實(shí)現(xiàn)目標(biāo)檢測的 DPC(圖 5)僅需幾個(gè)基本調(diào)用即可,如 Texas Instruments 的毫米波 SDK 發(fā)行版中包含的示例代碼所示(清單 1)。

圖 5:典型的目標(biāo)檢測處理鏈組合了單獨(dú)的數(shù)據(jù)處理單元 (DPU),該單元可執(zhí)行雷達(dá)信號(hào)處理功能,例如在數(shù)據(jù)采集期間進(jìn)行范圍 FFT 計(jì)算,以及在幀間期間進(jìn)行其他數(shù)據(jù)轉(zhuǎn)換。(圖片來源:Texas Instruments)
副本 for(i = 0; i < RL_MAX_SUBFRAMES; i++) ??? { ??????? subFrmObj = &objDetObj->subFrameObj[i]; subFrmObj->dpuRangeObj = DPU_RangeProcHWA_init(&rangeInitParams, errCode); if (*errCode != 0) { goto exit; } subFrmObj->dpuStaticClutterObj = DPU_StaticClutterProc_init(errCode); if (*errCode != 0) { goto exit; } subFrmObj->dpuCFARCAObj = DPU_CFARCAProcHWA_init(&cfarInitParams, errCode); if (*errCode != 0) { goto exit; } subFrmObj->dpuDopplerObj = DPU_DopplerProcHWA_init(&dopplerInitParams, errCode); if (*errCode != 0) { goto exit; } subFrmObj->dpuAoAObj = DPU_AoAProcHWA_init(&aoaInitParams, errCode); if (*errCode != 0) { goto exit; } }
清單 1:包含在 Texas Instruments 毫米波 SDK 發(fā)行版中的示例代碼(如這段代碼),顯示了通過向ObjDetObj結(jié)構(gòu)添加一組 DPU 來創(chuàng)建 DPC 的基本設(shè)計(jì)模式。(代碼來源:Texas Instruments)
分層軟件環(huán)境中的軟件服務(wù)使用 DSP 子系統(tǒng) (DSS)、主子系統(tǒng) (MSS) 和加速器(或它們的組合)來自動(dòng)實(shí)現(xiàn) DPU(圖 6)。在應(yīng)用層面,開發(fā)人員可使用毫米波 API 從完全配置的 DPC 訪問 DPU 結(jié)果,或通過 mmWaveLink API 直接訪問毫米波前端。

圖 6:Texas Instruments 的毫米波環(huán)境提供多個(gè)應(yīng)用編程接口 (API),這些接口可隱藏雷達(dá)系統(tǒng)操作的細(xì)節(jié),從而簡化了運(yùn)動(dòng)檢測應(yīng)用的開發(fā)。(圖片來源:Texas Instruments)
對(duì)于特定應(yīng)用,mmWaveLink 提供的其中一項(xiàng)關(guān)鍵服務(wù)是配置內(nèi)部雷達(dá)定時(shí)引擎,該引擎可生成 FMCW 啁啾和啁啾幀。如前所述,啁啾和啁啾幀的特性決定了目標(biāo)的檢測性能,但在實(shí)際設(shè)計(jì)中,選擇某些性能設(shè)置會(huì)對(duì)其他設(shè)置產(chǎn)生限制。
例如,由于最大檢測范圍與頻率斜率成反比,所以需要遠(yuǎn)范圍檢測的開發(fā)人員需要最大限度減少頻率斜率。這樣做會(huì)影響啁啾掃頻的帶寬,進(jìn)而導(dǎo)致分辨率降低,原因是檢測范圍分辨率與帶寬特征成比例。實(shí)際上,經(jīng)過優(yōu)化的啁啾和啁啾幀操作規(guī)范是雷達(dá)設(shè)計(jì)中的關(guān)鍵因素,需要開發(fā)人員平衡許多啁啾特性(圖 7)。

圖 7:目標(biāo)檢測范圍和分辨率主要取決于所傳輸啁啾的特征,需要開發(fā)人員仔細(xì)優(yōu)化啁啾發(fā)生器配置中的設(shè)置。(圖片來源:Texas Instruments)
除了提供用于評(píng)估啁啾設(shè)置的在線毫米波檢測估算器工具外,Texas Instruments 還提供一個(gè)龐大的數(shù)據(jù)庫,數(shù)據(jù)庫中帶有針對(duì)其毫米波傳感器工業(yè)工具箱中特定用例所推薦的啁啾配置。開發(fā)人員可以找到包括高分辨率手勢識(shí)別、遠(yuǎn)程交通監(jiān)控等應(yīng)用在內(nèi)的參考設(shè)計(jì)和示例代碼。基于毫米波 BoosterPacks 構(gòu)建的樣例應(yīng)用,可使開發(fā)人員快速評(píng)估毫米波性能,并針對(duì)自己的定制應(yīng)用來擴(kuò)展參考設(shè)計(jì)。例如,若要評(píng)估手勢控制,開發(fā)人員可將 IWR1443 BoosterPack (IWR1443BOOST) 評(píng)估模塊 (EVM) 連接到其 Windows PC 上的 USB 接口,上傳預(yù)先構(gòu)建的固件,然后探索復(fù)雜手勢(例如手指快速轉(zhuǎn)動(dòng))的檢測(圖 8)。

-
傳感器
+關(guān)注
關(guān)注
2548文章
50740瀏覽量
752143 -
人工智能
+關(guān)注
關(guān)注
1791文章
46896瀏覽量
237670 -
毫米波
+關(guān)注
關(guān)注
21文章
1916瀏覽量
64707
原文標(biāo)題:豬小屁熱席抖音圈,虎少爺科技攜手實(shí)豐文化玩轉(zhuǎn)兒童人工智能
文章出處:【微信號(hào):robot-1hjqr,微信公眾號(hào):1號(hào)機(jī)器人網(wǎng)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
Samtec展示各類毫米波解決方案
ICL1122 | 矽典微新一代毫米波傳感器SoC

物聯(lián)網(wǎng)中的高分辨率精確距離測量方案_毫米波雷達(dá)
低功耗毫米波雷達(dá)解決方案使電池供電類接近感應(yīng)產(chǎn)品實(shí)現(xiàn)新功能

什么是毫米波雷達(dá)?毫米波雷達(dá)模組選型

簡述毫米波雷達(dá)的結(jié)構(gòu)、原理和特點(diǎn)
毫米波雷達(dá)具有哪些特點(diǎn)和優(yōu)勢
毫米波應(yīng)用5G手機(jī)低介電絕緣透波散熱膜

基于毫米波雷達(dá)的手勢識(shí)別算法
Micradar毫米波雷達(dá)解決方案精彩亮相香港國際春燈展


毫米波雷達(dá)為智慧感知賦能,創(chuàng)新引領(lǐng)園區(qū)發(fā)展新潮流 #毫米波雷達(dá)感知應(yīng)用 #智慧園區(qū) #感知應(yīng)用場景解決方案
毫米波雷達(dá)的作用 毫米波雷達(dá)與超聲波雷達(dá)的區(qū)別
毫米波雷達(dá)輸出信號(hào)
毫米波RIS研究測試方案:一站式助力工程師探索高頻通信未來






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論