") 在工業(yè)控制與自動(dòng)化領(lǐng)域中,運(yùn)動(dòng)控制到底指的是什么呢?
在工業(yè)控制與自動(dòng)化領(lǐng)域中,運(yùn)動(dòng)控制到底指的是什么呢?
作為一個(gè)工控人,時(shí)常都會(huì)說到運(yùn)動(dòng)控制。那么,在工業(yè)控制與自動(dòng)化領(lǐng)域中,運(yùn)動(dòng)控制到底指的是什么呢?
電機(jī)控制與運(yùn)動(dòng)控制有何區(qū)別?
基本架構(gòu)組成是怎樣的?
運(yùn)動(dòng)控制發(fā)展趨勢(shì)如何?
......
讓我們一起來了解一下!
工業(yè)控制主要分兩個(gè)方向,一個(gè)是運(yùn)動(dòng)控制,通常用于機(jī)械領(lǐng)域;另一個(gè)就是過程控制,通常使用于化工領(lǐng)域。而運(yùn)動(dòng)控制指的是一種起源于早期的伺服系統(tǒng),基于電動(dòng)機(jī)的控制,以實(shí)現(xiàn)物體對(duì)角位移、轉(zhuǎn)矩、轉(zhuǎn)速等等物理量改變的控制。
電機(jī)控制與運(yùn)動(dòng)控制
在上面的定義中,有提到電機(jī)控制,但電機(jī)控制和運(yùn)動(dòng)控制是不同的。
從關(guān)注點(diǎn)來說,電機(jī)控制(這里指伺服電機(jī))主要關(guān)注的是控制單個(gè)電機(jī)的轉(zhuǎn)距、速度、位置中的一個(gè)或多個(gè)參數(shù)達(dá)到給定值。而運(yùn)動(dòng)控制主要關(guān)注點(diǎn)在于協(xié)調(diào)多個(gè)電機(jī),完成指定的運(yùn)動(dòng)(合成軌跡、合成速度),比較著重軌跡規(guī)劃、速度規(guī)劃、運(yùn)動(dòng)學(xué)轉(zhuǎn)換;比如數(shù)控機(jī)床里面要協(xié)調(diào)XYZ軸電機(jī),完成插補(bǔ)動(dòng)作。
電機(jī)控制常常作為運(yùn)動(dòng)控制系統(tǒng)的一個(gè)環(huán)節(jié)(通常是電流環(huán),工作在力矩模式下),更著重于對(duì)電機(jī)的控制,一般包括位置控制、速度控制、轉(zhuǎn)矩控制三個(gè)控制環(huán),一般沒有規(guī)劃的能力(有部分驅(qū)動(dòng)器有簡(jiǎn)單的位置和速度規(guī)劃能力)。
運(yùn)動(dòng)控制往往是針對(duì)產(chǎn)品而言的,包含機(jī)械、軟件、電氣等模塊,例如機(jī)器人、無人機(jī)、運(yùn)動(dòng)平臺(tái)等等,是對(duì)機(jī)械運(yùn)動(dòng)部件的位置、速度等進(jìn)行實(shí)時(shí)的控制管理,使其按照預(yù)期的運(yùn)動(dòng)軌跡和規(guī)定的運(yùn)動(dòng)參數(shù)進(jìn)行運(yùn)動(dòng)的一種控制。
兩者有部分內(nèi)容是重合的:位置環(huán)/速度環(huán)/轉(zhuǎn)距環(huán)可以在電機(jī)的驅(qū)動(dòng)器中實(shí)現(xiàn),也可以在運(yùn)動(dòng)控制器中實(shí)現(xiàn),因此兩個(gè)屬于容易混淆。
基本架構(gòu)組成
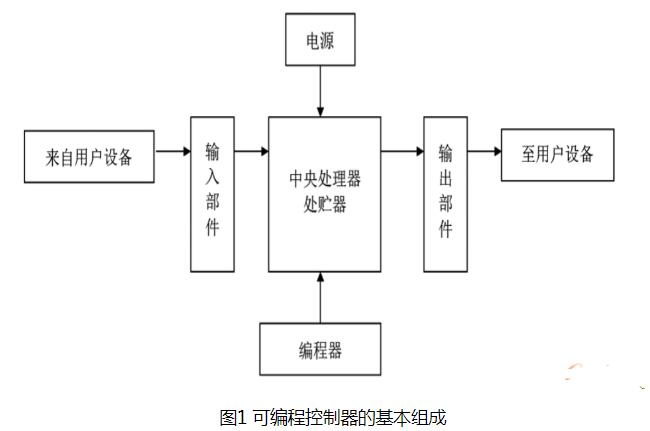
一個(gè)運(yùn)動(dòng)控制系統(tǒng)的基本架構(gòu)組成包括:
運(yùn)動(dòng)控制器:用以生成軌跡點(diǎn)(期望輸出)和閉合位置反饋環(huán)。許多控制器也可以在內(nèi)部閉合一個(gè)速度環(huán)。
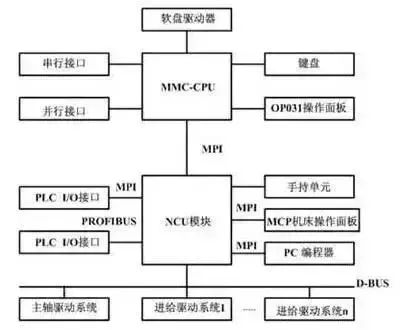
運(yùn)動(dòng)控制器主要分為三類,分別是PC-Based、專用控制器、PLC。其中PC-Based運(yùn)動(dòng)控制器在電子、EMS等行業(yè)被廣泛應(yīng)用;專用控制器的代表行業(yè)是風(fēng)電、光伏、機(jī)器人、成型機(jī)械等等;PLC則在橡膠、汽車、冶金等行業(yè)備受青睞。
驅(qū)動(dòng)或放大器:用以將來自運(yùn)動(dòng)控制器的控制信號(hào)(通常是速度或扭矩信號(hào))轉(zhuǎn)換為更高功率的電流或電壓信號(hào)。更為先進(jìn)的智能化驅(qū)動(dòng)可以自身閉合位置環(huán)和速度環(huán),以獲得更精確的控制。
執(zhí)行器:如液壓泵、氣缸、線性執(zhí)行機(jī)或電機(jī),用以輸出運(yùn)動(dòng)。
反饋傳感器:如光電編碼器、旋轉(zhuǎn)變壓器或霍爾效應(yīng)設(shè)備等,用以反饋執(zhí)行器的位置到位置控制器,以實(shí)現(xiàn)和位置控制環(huán)的閉合。
眾多機(jī)械部件用以將執(zhí)行器的運(yùn)動(dòng)形式轉(zhuǎn)換為期望的運(yùn)動(dòng)形式,它包括齒輪箱、軸、滾珠絲杠、齒形帶、聯(lián)軸器以及線性和旋轉(zhuǎn)軸承。
從運(yùn)動(dòng)控制器看運(yùn)動(dòng)控制
運(yùn)動(dòng)控制的出現(xiàn)更加促進(jìn)機(jī)電控制的解決方案,比如以前凸輪和齒輪都需要機(jī)械結(jié)構(gòu)實(shí)現(xiàn),現(xiàn)在可以使用電子凸輪、電子齒輪來實(shí)現(xiàn),消除了機(jī)械實(shí)現(xiàn)過程的回程、摩擦和磨損等。
成熟的運(yùn)動(dòng)控制產(chǎn)品不僅僅需要提供路徑規(guī)劃、前瞻控制、運(yùn)動(dòng)協(xié)調(diào)、插補(bǔ)、運(yùn)動(dòng)學(xué)正逆解和驅(qū)動(dòng)電機(jī)的指令輸出等,還需要具備工程配置軟件(如SIMOTION的SCOUT)、語法解釋器(不僅是指自己的語言,而且包括IEC-61131-3的PLC語言支持)、簡(jiǎn)單的PLC功能、PID控制算法實(shí)現(xiàn)、HMI交互接口、故障診斷接口,高級(jí)的運(yùn)動(dòng)控制器還能夠?qū)崿F(xiàn)安全控制等。
運(yùn)動(dòng)控制之發(fā)展趨勢(shì)
就運(yùn)動(dòng)控制器來說,隨著行業(yè)應(yīng)用的擴(kuò)展,中國(guó)運(yùn)動(dòng)控制市場(chǎng)逐漸成熟,在機(jī)床、雕刻機(jī)、半導(dǎo)體、工業(yè)機(jī)器人、EMS、物料搬運(yùn)等多數(shù)下游機(jī)械行業(yè)均取得不錯(cuò)的發(fā)展。尤其在鋰電池、工業(yè)機(jī)器人、半導(dǎo)體、EMS等行業(yè),歐美和日本運(yùn)動(dòng)控制廠商表現(xiàn)突出,擁有較強(qiáng)的綜合競(jìng)爭(zhēng)優(yōu)勢(shì)。
由于運(yùn)動(dòng)控制的目標(biāo),是要完成生產(chǎn)線流程制造產(chǎn)品,在中間的運(yùn)動(dòng)控制過程,其實(shí)并不是最最重要,反而是如何能正確實(shí)時(shí)的達(dá)到要求,才是最重要的功能;加上現(xiàn)在各種產(chǎn)品精細(xì)度要求愈來愈高,對(duì)制程要求也愈來愈嚴(yán)苛,而運(yùn)動(dòng)控制講究實(shí)時(shí)與精準(zhǔn),要達(dá)到最佳化,就得整合各種相關(guān)技術(shù),這樣的整合被視為難度最高的控制技術(shù)。
專用控制器在一段時(shí)間內(nèi)仍將是工業(yè)機(jī)器人行業(yè)主要的運(yùn)動(dòng)控制器類型。半導(dǎo)體行業(yè)PC-Based運(yùn)動(dòng)控制市場(chǎng)發(fā)展穩(wěn)定,增速在17%左右。物流行業(yè)對(duì)機(jī)器視覺功能的需求增加,導(dǎo)致PC-Based比例也逐步增加。在傳統(tǒng)印刷機(jī)械上仍然以PLC運(yùn)動(dòng)控制器為主,PC-Based運(yùn)動(dòng)控制器的應(yīng)用剛剛起步,在新興的數(shù)碼印刷機(jī)械上使用較多,未來將小幅增長(zhǎng)。
-
電機(jī)控制
+關(guān)注
關(guān)注
3526文章
1857瀏覽量
268370 -
自動(dòng)化
+關(guān)注
關(guān)注
29文章
5512瀏覽量
79103 -
工業(yè)控制
+關(guān)注
關(guān)注
37文章
1443瀏覽量
85785
原文標(biāo)題:電機(jī)控制、運(yùn)動(dòng)控制,你真的分得清嗎?
文章出處:【微信號(hào):wwygzxcpj,微信公眾號(hào):電機(jī)技術(shù)及應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
基于機(jī)器視覺和運(yùn)動(dòng)控制的工業(yè)自動(dòng)化
基于機(jī)器視覺和運(yùn)動(dòng)控制的工業(yè)自動(dòng)化
無線通訊在工業(yè)自動(dòng)化控制領(lǐng)域中的應(yīng)用
Trinamic運(yùn)動(dòng)控制滿足工業(yè)自動(dòng)化
運(yùn)動(dòng)控制在工業(yè)控制與自動(dòng)化領(lǐng)域的發(fā)展趨勢(shì)
PLC廣泛地運(yùn)用到工業(yè)自動(dòng)化領(lǐng)域中
工業(yè)控制與自動(dòng)化領(lǐng)域中,淺析運(yùn)動(dòng)控制系統(tǒng)
運(yùn)動(dòng)控制在工業(yè)控制及自動(dòng)化領(lǐng)域的應(yīng)用
工業(yè)控制與自動(dòng)化領(lǐng)域中,淺聊運(yùn)動(dòng)控制系統(tǒng)

基于機(jī)器視覺和運(yùn)動(dòng)控制的工業(yè)自動(dòng)化
電機(jī)控制和運(yùn)動(dòng)控制的基本架構(gòu)組成及發(fā)展趨勢(shì)

集成機(jī)器視覺與運(yùn)動(dòng)控制的高速工業(yè)自動(dòng)化應(yīng)用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論