 Apollo高精地圖如何表征和規范,一起來了解!
Apollo高精地圖如何表征和規范,一起來了解!
高精地圖與普通地圖不同,高精地圖主要服務于自動駕駛車輛,通過一套獨特的導航體系,幫助自動駕駛解決系統性能問題,擴展傳感器檢測邊界。
目前 Apollo 內部高精地圖主要應用在高精定位、環境感知、決策規劃、仿真運行四大場景,幫助解決林蔭道路GPS信號弱、紅綠燈定位與感知以及十字路口復雜等導航難題。
上周阿波君為大家詳細介紹了「Apollo進階課程?丨Apollo地圖生產技術」。
詳細講解了高精地圖生產的四個環節:數據采集、數據處理、元素識別、人工驗證。通過全自動數據融合加工和基于深度學習的地圖要素識別方法,最后進行人工驗證生產的全部過程。
本周阿波君將與大家分享Apollo高精地圖(高精地圖的表征和規范)。下面,我們一起進入進階課程第12期。
以下,ENJOY
Apollo高精地圖能夠表征的元素如下圖所示,包括道路、路口、交通信號燈、邏輯關系元素以及其他的道路對象元素。
高精地圖的數據元素
道路包括左邊界右邊界。它可分為兩個層次,一是道路級別,一是Lane(車道)級別。
每個Lane都有左邊、右邊界;道路也有道路邊界,而且道路邊界是強約束,即自動駕駛的時候,道路邊界是永遠不能壓的。
車道線理論上也是不能壓的,但是如果在緊急情況下可以壓車道線,比如說可以越過虛黃線進行借道超車。
路口是一個相對復雜的場景,可以進一步細分為路口邊界和虛擬車道。路口邊界主要用于感知。
可以通過路口的邊界,對感知進行過濾。如果感知識別到的靜態物體不在地圖的路口邊界之內,就可以暫時忽略它。虛擬車道主要是用來路口的行駛引導。
交通信號燈可以分為紅綠燈和其他道路標志。高精地圖會為紅綠燈提供一個三維空間位置,其次也會提供紅綠燈跟車道之間的關聯關系,即告知當前所在車道,應該看哪個燈。
道路標志主要包括人行橫道,停止線以及一些路上的文字信息。這些信息可以用于各個模塊,例如感知、PNC等。
邏輯關系表述。當前,地圖中各個元素之間的關系并沒有嵌入到元素的表述中,而是使用overlap來表述兩個元素之間的關系。
Overlap主要是用來描述兩個元素的空間關系。
如下圖所示,Lane和Junction在空間上有重疊,它們之間就會有Overlap。
Overlap關系
高精地圖的車道模型
上圖給出了Apollo的車道模型及其相關描述元素。它與openDRIVE大致的規則是一樣的,把縱向切成Section,橫向還是使用Lane分割。
該車道模型包含了很多元素屬性。其中Left road_sample主要用來描述中心線到兩個邊界的距離,該邊界指的是車道線邊界。
Left road sample和Right road sample主要用來表述車道中心線到道路的物理邊界的距離。
路口表述:路口分為真實路口和十字路口。在實踐過程中,發現除了真實路口之外,在車道數變化的時候,比如從兩車道變到三車道,需要感知周圍有沒有車輛,在Apollo高精地圖里面也把這種情況處理成一個路口。
這也是In road和Cross road的區別。
高精地圖的Junction模型
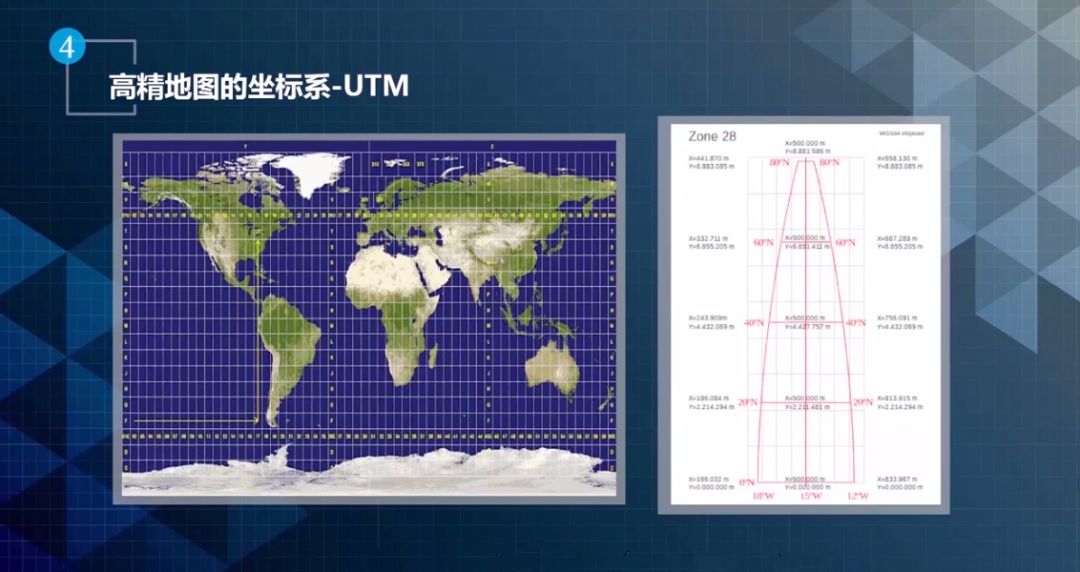
高精地圖的UTM坐標系
UTM坐標系把全球分成60個區域帶(Zone),每個Zone里面都是相當于Zone中心的一個局部坐標系,如上所示。
UTM坐標系描述的位置十分精確。目前,Apollo內部主要采用UTM坐標系。
84坐標系是一套全球經緯度,也是高精地圖里面使用的坐標系。
在該坐標系中,把整個地球想象成是一個橢球,地面的高度是相對于橢球面的一個偏移。高由正數表示,低由負數表示。

高精地圖的Track坐標系
Track坐標系是基于st的,如上圖所示。s是縱向,t是橫向。這個坐標系用來表述一個元素跟Lane之間關系,描述它位于Lane的什么位置,相對于Lane起點的偏移量是多少。
Apollo OpenDRIVE把所有元素做了歸類。
類似于Road和Junction。路上的所有的地面標識都歸屬為Objects,所有的標牌都歸屬為Signal,并通過Overlap把它們關聯起來,如下圖所示。
Apollo的OpenDrive規范
Apollo的OpenDRIVE跟標準OpenDRIVE的區別主要有以下四點。
首先,元素形狀的表達方式不同。
標準OpenDRIVE是基于參考線加偏移,并采用方程來描述。
Apollo里面的OpenDRIVE,都是坐標點,沒有采用方程的方式。采用方程方式的好處在于數據量非常小,通過三四個參數就可以描述一個非常長的線。
采用坐標點的方式,數據量會稍微大一點。但是也有很多的好處。第一,用點表示對于下游的計算非常友好,不需要再重新通過線去做點的采樣。
第二,在道路急于轉彎的地方,原始的OpenDRIVE把基于Reference Line的方式還原成點的方式,會導致道路上存在毛刺。這種處理方式對于無人駕駛來說非常危險。
一旦道路出現毛刺,就會導致無人駕駛車猛打方向盤,可能直接沖到路邊上去。
其次,Apollo對OpenDRIVE進行了元素類型的擴展。比如增加了禁停區,人行橫道、減速帶等元素的藐視。
第三是增加了一些道路元素關系的表述。比如新增了Junction與Junction內元素的關聯關系。
最后還增加了諸如停止線與紅綠燈的關聯關系,中心線到邊界的距離等的描述。
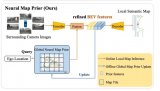
高精地圖引擎
HDMAP引擎是Apollo里面用于從HDMAP里面提取相關元素給下游的一個模塊。它的結構框圖如上圖所示。
HDMAP 引擎可以通過ID去檢索一個元素,也可以通過空間位置查找元素,比如給定一個點和半徑,可以把這個范圍之內所有的紅綠燈都提出來。
在國內,采集地圖屬于國家機密事項。并不是任何人都可以做測繪,并不是每一家廠商或者公司都有資格采集地圖。
采集地圖,必須要經過國家測繪部門/安全部門的審批。
同時,測繪得到的數據需要進行加密。高程、曲率、坡度等在高精地圖里面是不允許表述的,但這些數據對于無人駕駛又是必須的。如何在符合國家安全要求和技術需求之間找到平衡,這仍是自動駕駛發展所需要正視、解決的問題。
-
自動駕駛
+關注
關注
783文章
13682瀏覽量
166143 -
Apollo
+關注
關注
5文章
340瀏覽量
18405 -
深度學習
+關注
關注
73文章
5492瀏覽量
120975
原文標題:進階課程 ? | Apollo高精地圖
文章出處:【微信號:Apollo_Developers,微信公眾號:Apollo開發者社區】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
Apollo相對地圖在自動駕駛中的使用及實際應用
高精地圖在無人駕駛領域的作用,高精地圖與普通導航地圖的區別

高德和整車廠合作,拿下國內首個高精地圖訂單
Apollo定位、感知、規劃模塊的基礎-高精地圖
百度Apollo高精定位方案分析
一起來了解下紫外激光打標機的加工工筆的工藝

一起來了解工控主板研發設計特性是什么
從零學習自動駕駛—百度Apollo高精地圖
為什么需要去除高精地圖?





 工商網監
工商網監
評論