 CVPR 2019:中科院、牛津等提出SiamMask網絡,視頻跟蹤最高精度
CVPR 2019:中科院、牛津等提出SiamMask網絡,視頻跟蹤最高精度
今年CVPR有一篇亮眼的視覺跟蹤方面的論文,作者提出新算法SiamMask,在視頻跟蹤任務上達到最優性能,并且在視頻目標分割上取得了當前最快的速度。作者來自中科院自動化所、牛津大學等,本文帶來一作自動化所王強的解讀。
今年的 CVPR 的結果已經完全公布,我參與的兩篇文章SiamMask和SiamRPN++均被接收。遺憾的是 SiamMask 最終并沒有被 reviewer 認可,只取得了 poster。
SiamMask 的測試代碼:foolwood/SiamMask
視頻跟蹤經典工作
在兩年前,當我們提起視覺跟蹤(Visual Tracking),我們的腦海里總是灌滿了相關濾波(KCF,SRDCF,CF2,CCOT,ECO... 等等經典工作在我的腦海里飄蕩)。如果給這個時代截取一篇最經典的工作,我想我會選擇 KCF。他是真的將視覺跟蹤推向流行,讓整個領域真的沸騰起來的工作。如果現在來分析他之所以能統治跟蹤領域的原因,我覺得主要是兩點:足夠高效 + 開源。高效到只需要 10 行以內的代碼就可以實現核心計算,隨便一個 CPU 就可以跑到 200FPS 以上。這極大程度上拉低了視覺跟蹤領域的門檻,讓所有人很容易進入這個領域。開源,這個詞匯現在看已經是土的不能再土的詞匯。真的做起來卻也存在很多阻力。
當然,除了懷舊以外。我們也會經常反思甚至有些詫異,似乎視覺跟蹤和整個 CV 大領域走到了不同的方向,深度學習在跟蹤領域并沒有得到什么用武之地。當然,所有新的方向的產生大都遵循著量變到質變的基本原則。下圖可以看到到 CVPR2018 時候的時間跟蹤發展,相關濾波的發展已經經過了幾代迭代,深度學習方向也在不斷積攢(廣度高而深度淺)。大家都在嘗試可行的方向。目前來看,應該是以 SiamFC 為代表的 Siamese Tracker 脫穎而出。
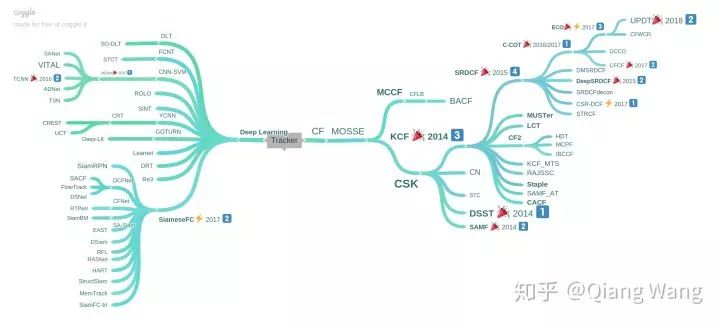
視覺跟蹤在 CVPR2018 時的發展分布
而 Siamese 網絡的概念應用于目標跟蹤的源頭應該從 SINT 這篇文章開始,但真正開始流行卻是從 SiamFC 開始。簡潔優雅的框架讓它得變得流行,像極了上一波的 KCF。
有關 SiamFC 的討論可以見上一篇:Qiang Wang:CVPR2018 視覺跟蹤 (RASNet)
https://zhuanlan.zhihu.com/p/34222060
SiamMask:視頻跟蹤到底是跟蹤什么
Motivation:視頻跟蹤到底是跟蹤什么?
長久以來,我們的思維傾向于陷入舒適區。當 A 做了物體檢測,我們嘗試改網絡,改 loss,別的領域 trick 拿來就是一篇。而我們常常忽略了更為重要的問題,到底這個問題的該如何定義,這點極為重要。
對于目標跟蹤而言,一般論文開篇通常都會說在第一幀給定目標位置,在后續幀中預測目標的位置。然而如何對后續幀中表述的定義直接影響了整個跟蹤領域的發展。
為了方便表述,早期的跟蹤算法都是坐標軸對齊的的矩形框。但隨著跟蹤精度的不斷提升,數據集的難度在不斷提升,在 VOT2015 時即提出使用旋轉矩形框來作為標記。在 VOT2016 的時候提出自動的通過 mask 來生成旋轉框的方法。更為本質的,我們會發現,這個旋轉的矩形框實際上就是 mask 的一種近似。我們所要預測的實際上就是目標物體的 mask。利用 mask 才能得到精度本身的上界。
我自己將 2013 年以后的跟蹤分為幾類,第一類是預測 score 的方法,這類算法以相關濾波和 SiameFC 為代表。通過預測候選區域的score map來得到物體的位置,物體的尺度大小通常是通過圖像金字塔得到。同時無法得到物體的長寬比變化。
第二類就是以 GOTURN 和 SiamRPN 為代表的做 boundingbox regression 的方法。這也是 SiamRPN 取得當前最好結果的核心所在,充分挖取精度方向的紅利。實際上并不是 SiamRPN 預測的有多穩定,而是在預測正確的時候,會給出更為精確的 box。利用網絡預測長寬比可以調整 box,這個方向一直以來被大家所忽視,所以 SiamRPN 很快殺出重圍。
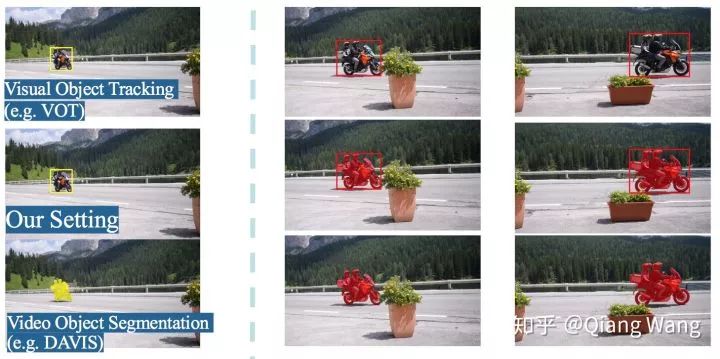
而在物體發生旋轉的時候,簡單的 box 的表述通常會產生極大的損失,這實際上就是表述本身存在的缺陷。而為了進一步探索在精度上存在的問題。我們更進一步,直接預測物體的 mask。這種表述使得我們可以得到最為準確的 box。最直觀的利用一個簡單的事例的可視化就可以看出,這三種算法的區別(左中右分別是SiamFC | SiamRPN |SiamMask)。
同時,對于視頻目標分割(VOS)領域,之前普遍流行的算法是利用語義分割網絡在線進行一個二分類的訓練,然后再后續幀進行預測。這種方法在訓練過程中一般都會花費數分鐘,給人一種電腦假死的感覺。最近越來越多的不需要在線 finetune 的算法被提出。但其速度仍然無法到達令人滿意的狀態,例如 FAVOS 和 OSMN 分別需要 1s / 幀,120ms / 幀。這距離真正的實時運行還是有一定差異。另一方面,VOS 算法的第一幀需要給定目標的 mask,這在人機交互的場景中很難時間,這個 mask 獲取成本過高。
所以我們提出了對視覺目標跟蹤(VOT)和視頻目標分割(VOS)的統一框架 SiamMask。我們將初始化簡化為視頻跟蹤的 box 輸入即可,同時得到 box 和 mask 兩個輸出。
具體實現
當有了上述的 motivation 之后,具體實現非常簡單,只需要在 siamese 網絡架構中額外增加一個 Mask 分支即可。
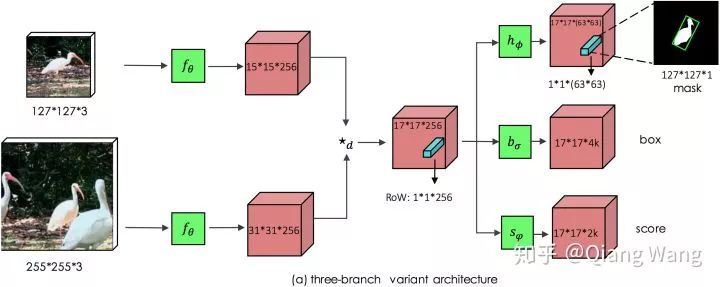
但是相較于預測 score 和 box,mask 的預測會更為困難。我們這里使用的表述方法,是利用一個 vector 來編碼一個 RoW 的 mask。這使得每個 prediction 位置具有非常高的輸出維度(63*63), 我們通過 depthwise 的卷積后級聯 1x1 卷積來升維來實現高效運行。這樣即構成了我們的主要模型框架。
但直接預測的 Mask 分支的精度并不太高。所以提出了如下圖所示的Refine Module用來提升分割的精度,refine module 采用 top-down 的結構。
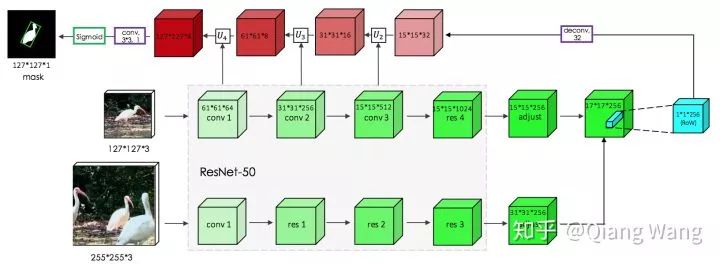
這一部分借鑒了 SharpMask 的思路。deepmask 和 sharpmask 是 facebook 在 2015-2016 年提出的物體分割 proposal 框架。我進行了一個重現foolwood/deepmask-pytorch。
https://github.com/foolwood/deepmask-pytorch
實驗結果
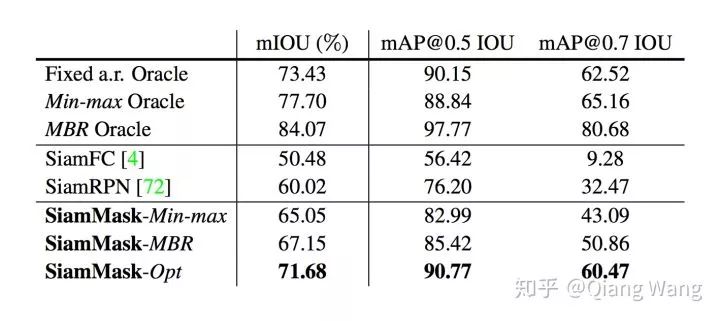
對照實驗(ablation study)結果方面,我們首先通過實驗分析驗證了所提出的 Mask 的輸出表達對于跟蹤問題的貢獻。通過進行 Oracle 實驗分析,可以明確得出,旋轉矩形框的平均 IoU 會遠好于只預測坐標軸對齊的矩形框。尤其是在更高的 IoU 閾值下,旋轉矩形框的優勢更為明顯。當對比 SiamFC,SiamRPN 的時候,SiamMask 對于整體的精度提升非常顯著。對于輸出 mask 轉換為 box,有多重選擇,我們使用了較為容易生成的最小外包矩形(MBR)。按照 VOT 的優化方式生成的框的質量會更高,但按照優化算法生成太慢。如果有編碼好的同學可以把這個加速,我相信我們算法的精度至少可以再提升一個百分點,非常歡迎嘗試之后在我們的 github 上提 Pull Requests。
優化的 box 的 matlab:http://cmp.felk.cvut.cz/~vojirtom/dataset/votseg/data/optimize_bboxes.m
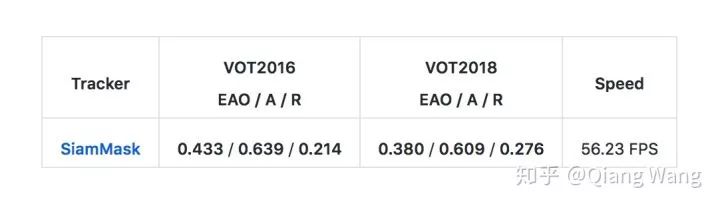
在視頻跟蹤領域(VOT),VOT2016 和 VOT2018 數據集上的性能,我們的方法已經到達到SOTA 的結果,同時保持了 55fps 的超實時的性能表現。
在視頻目標分割領域(VOS),我們取得了當前最快的速度。在 DAVIS2017 和 Youtube-VOS 上,我們和最近發表的較為快速的算法對比,我們的算法可以取得可比較的分割精度,同時速度快了近一個數量級。對比經典的 OSVOS,我們的算法快了近三個數量級,使得視頻目標分割可以得到實際使用。
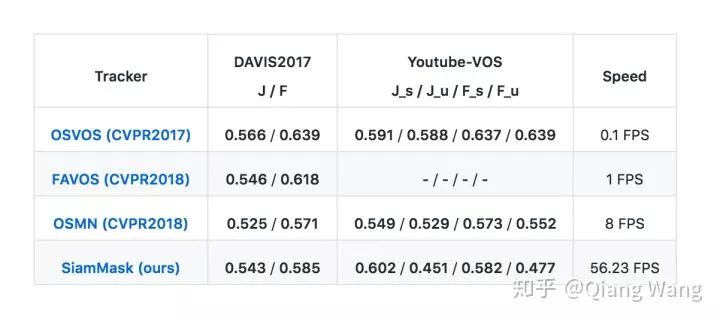
此外,我們需要強調的是,視頻分割任務目前的視頻片段都較短,我們的 decay 要遠小于其他算法,這意味著在更長的視頻片段中,我們的算法性能會保持的更好。
Adobe MAX 2018 FastMask 項目
我也使用 SiamMask 做了一個類似的項目,當然精度上和 Adobe 的 FastMask 肯定存在差距。但我們的方法可以很容易的生成一些表情包或者 b 站的智能防擋彈幕。
CVPR2019 跟蹤領域發展
從今年接收的文章已經可以明顯看出來,跟蹤領域已經基本完成換代更新。接收的文章中 Siamese 網絡的改進工作已經占據了主導的地位。
SiamRPN++,CIR兩篇都是圍繞如何使用深度網絡主干這個問題,兩篇文章都中了 oral。這個問題一直困擾著整個跟蹤圈子,在此之前的所有工作都采用的是 alexnet 為主的網絡架構。不能使用現代網絡架構一直困擾著整個跟蹤領域的發展。SiamRPN++ 通過數據增強的方法解決訓練的空間位置偏見。CIR 通過 crop 操作從網絡架構上減弱網絡 padding 帶來的學習偏見,通過大量的實驗分析了感受野等因素對學習的影響。總的來說,當網絡問題被解決了之后直接導致了現在在幾乎所有的數據集上,SiamRPN++ 已經超過了相關濾波的方法。
在 SiamRPN++ 的基礎上,網絡主干問題已經被解決,我們可以做更多方向的探索。我們可以非常簡單的讓輸出做更復雜的預測,這就催生了SiamMask這篇文章。
SPM和C-RPN兩篇都算是多階段的 SiamRPN 擴展。SPM 就是典型的 faster-RCNN 的思路做跟蹤,只是最后的 score fusion 的方式可以再優雅一些。C-RPN 當然就是Cascade R-CNN: Delving into High Quality Object Detection在跟蹤領域的翻版。兩者的思路都很直接,通過第二 / N 階段來學習更精細的判別。
Martin Danelljan大神的ATOM: Accurate Tracking by Overlap Maximization這篇肯定也是重量級的文章。Martin 大神并沒有 fellow SiamRPN 的架構,轉而使用粒子濾波采樣搭配 IoU 預測,多次迭代得到目標結果。在多個庫上取得了非常驚人的結果。這項工作我覺得最突破的點是網絡學習的問題實際上更 hard,更符合跟蹤的需求。
LaSOT這個測評集的接收也是常規操作。希望各位大佬能繼續維護好這個庫。最近跟蹤的數據庫相當多,人們都意識到之前的數據已經無法滿足深度學習的跟蹤算法。
關于 Siamese Tracking 的未來研究方向
當你閱讀了一定的文章以及有現成的代碼之后,下面當然是如何著手改進。我自己總結了一些小的可以改進的方向,僅供參考。
1)高效的在線學習算法:進展到目前為止,我的所有實驗研究表明。Siamese 網絡無法真正意義上抑制背景中的困難樣本。離線的學習從本質上無法區分兩個長相相似的人或者車。而 CF 相關算法可以通過分析整個環境的上下文關系來進行調整。如果對于提升整個算法的上界(偏學術)的角度考慮,在線學習有必要。如果正常的工程使用,我認為目前的算法只要在相應的場景中進行訓練就足夠了。
2)精確輸出表達:今年我們的工作提出額外的 mask 輸出。可直接擴展的思路為關鍵點輸出(CornerNet / PoseTrack),極點預測(ExtremeNet),甚至 6D pose 跟蹤。本質上是通過網絡可以預測任何與目標相關的輸出。大家可以任意的發散思維。
3)定制網絡架構:其中包含兩個子方向,一個是追求精度的去探索究竟什么樣的網絡架構會有利于當前的跟蹤框架的學習。另一個有價值的子方向是如何構建超快速的小網絡用于實際工程。工程項目中有時并沒有 GPU 的資源供使用,如何提供 “廉價” 的高質量跟蹤算法也具有很強的實際意義。當對網絡進行裁剪之后,很容易達到 500FPS 的高性能算法來對傳統的 KCF 進行真正的替換。
4)離線訓練學習優化:目前的跟蹤算法在相似性學習方向還是過于簡單,如果去設計更為有效的度量學習方案,應該會有一定的提升。同時我們也并沒有很好的掌握網絡的訓練。當前的訓練策略是將網絡主干的參數進行固定,先訓練 head。然后逐步放開。實際上我們發現,當直接將所有層全部放開一起訓練的時候,網絡的泛化性能會顯著下降。另一個方面,train from scratch 的概念已經在檢測領域非常普遍了。跟蹤的網絡目前我們的經驗在跟蹤方面并不 work。
5)更細粒度預測:這一條實際上是上一條的續集,就是專注于 score 分支的預測。現在大家的做法是 > 0.6 IoU 的都當做前景(正樣本),但實際上正樣本之間還是有較大的差異的。跟蹤本質上也是不斷預測一個非常細小物體幀間運動的過程,如果一個網絡不能很好的分辨細小的差異,他可能并不是一個最優的設計選擇。這也是 ATOM 的 IoUNet 主攻的方向。
6)泛化性能提升:非常推薦自動化所黃凱奇老師組的GOT-10k數據集,數據組織的非常棒。黃老師組在 one-shot learning 領域有著深厚的積淀,所以站在這個領域的角度,他們提出了嚴格分離訓練集和測試集的物體類別來驗證泛化性能。所以原則上所有 one-shot learning 方向的一些嵌入學習方法都可以移過來用。同時,我覺得 Mask-X-RCNN,segment everything 這個思路可以借鑒。本質上我也不得不承認,基于深度學習的跟蹤算法存在泛化性能問題。我們有理由懷疑跟蹤是否會在未知的類別上有較好的泛化性能,實際上肯定是會下降。
7)long-term 跟蹤框架:截止到目前為止,雖然 VOT 組委會以及牛津這邊的 OxUVA 都有專門的 long-term 的數據集,但 long-term 算法并沒有一個較好的統一框架出來。關于這方面的研究似乎有點停滯,今年大連理工的文章非常可惜,我覺得質量非常不錯。
-
自動化
+關注
關注
29文章
5519瀏覽量
79122 -
數據集
+關注
關注
4文章
1205瀏覽量
24649 -
深度學習
+關注
關注
73文章
5493瀏覽量
120999
原文標題:CVPR 2019:中科院、牛津等提出SiamMask網絡,視頻跟蹤最高精度
文章出處:【微信號:AI_era,微信公眾號:新智元】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論