 自動駕駛如何找準定位的位置
自動駕駛如何找準定位的位置
自動駕駛定位有兩種主流方法:一種是絕對定位法,直接測出空間位置坐標;另一種是相對定位法,已知現在所處位置,和下一步移動的方向和距離,計算出下一步位置。
2000年,軟銀投資阿里巴巴,電商時代自此開始;20年后,軟銀9.4億美元押注無人駕駛運貨車創業公司nuro,這是否預示,20年自動駕駛時代即將開啟?本文深入淺出講自動駕駛,希望我們“時間有效率,時間有思考”。
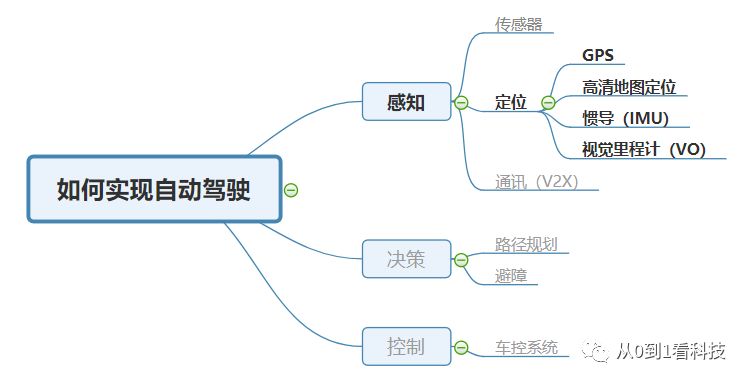
我們日常駕駛使用app地圖導航,輸入所處位置、目的地后,地圖軟件會規劃出適合的路徑。地圖APP的定位功能一般由GPS定位系統提供,精度在米級別,特殊環境會丟失定位信號。但得益于人類司機的視覺和經驗,米級別定位已經能夠滿足導航需求。但想象一下,自動駕駛需要自主判斷何時轉向,分叉口選哪一條,立交橋上哪一層,對定位的精度和實時性要求極高,目前認為厘米級精度才能滿足安全。
自動駕駛定位有兩種主流方法:一種是絕對定位法,直接測出空間位置坐標;另一種是相對定位法,已知現在所處位置,和下一步移動的方向和距離,計算出下一步位置。
舉個栗子:小明來到陌生的城市,可以通過地圖APP中的GPS定位,或是通過對照周圍街道和建筑物,在地圖中找到自己位置;之后,小明向東走500米,右拐又走了500米,這時不再需要打開地圖,就可以估算出是起始點東南方500*√2 的位置。自動駕駛兩類定位方法,包括類似查閱地圖的絕對定位:GPS和高清地圖定位,也包括類似計算位移的相對定位:慣性傳感器和視覺里程計(VO)。
I 絕對定位--GPS
GPS是一種衛星定位技術,起始于美國軍方的項目,通過計算天上多顆衛星和目標之間的距離,實現目標定位。具體來說,衛星發出可以穿透大氣層的低頻電磁波信號,被目標的接收器天線接收,光速乘以信號傳播時間,就是接收器和衛星的距離。理論上,目標接收器接收到3個衛星的測距信號,就可以根據三角定位原理定位出所在的位置。假設A衛星測量距離接收器1萬千米,那么可以把接收器的位置限定在地球距離衛星1萬米的圈圈軌跡上;B衛星2萬千米,C衛星3萬千米,同理得到兩個可選軌跡;三個軌跡的交點,就是所在的位置,即通過畫圈圈求交點實現定位。實際應用里面,接收器都是利用4個甚至更多的衛星,來更精確確定位置。
GPS的測距簡單方便,但也會有誤差。主要因為光速(真空中約300,000km/s)實在太快了,測量的信號傳播時間稍微有些偏差,或是不同介質光速傳播速度影響,就會導致距離誤差無法忽視,對于實現厘米級定位精度提出了挑戰。
為了降低GPS的定位誤差,引入了差分GPS技術。舉個栗子說明原理:小巨人小明身高2米26,這個身高已經過官方認證。小明的朋友小小明身高未知。一次,小明和小小明用同一臺測量計量身高,顯示小明身高2米36,小小明為1米60,小小明的真實身高是多少呢?這個例子中求解思路和差分GPS原理類似:通過比較已知量和測量量估算測量誤差,用于待測目標的誤差矯正。
差分GPS的具體做法是:在需要精確測度誤差的區域安裝接收機基準站,基準站的精確位置坐標已知。通過對比基準站GPS測量數據和其真實坐標,獲得誤差數據,來糾正附近定位目標的誤差。通常基準站能夠覆蓋方圓100km內的定位目標,用差分GPS修正后誤差能控制在亞米級別甚至厘米級別。
不過GPS和差分GPS相結合對于自動駕駛還不夠用,主要原因有:城市環境的高樓大廈,會對衛星信號產生反射和折射,干擾測距;另外GPS還有個更新頻率低的問題,民用GPS是10HZ,意味著0.1秒才會刷新一次定位數據,高速自動駕駛來無法容忍,必須和其他傳感器搭配使用。
I 絕對定位--高精地圖定位
高清地圖定位也是一種絕對定位方法。高清地圖精度很高,用戶將所在位置環境信息匹配到高清地圖中,能精確確定位置。根據主傳感器不同,高清地圖有激光點云地圖和高清視覺地圖。
1. 激光點云地圖匹配
“傳感器篇”中我們介紹過,激光雷達能夠測距并形成點云,準確度高,是目前L3級以上自動駕駛中非常重要的傳感器。基于激光雷達的點云地圖匹配獲得位置信息,是一種常用的辦法。
這個定位方法首先需獲得高精度激光點云地圖。安裝了激光雷達的地圖采集車反復采集行駛道路的環境,制備成點云地圖。自動駕駛車使用時,通過把激光雷達實時收集到的周圍環境點云信息,和高清點云地圖匹配,確定位置。
由于高清地圖的數據量很大,定位目標通過激光雷達采集到的點云信息直接和整幅地圖進行匹配計算量太大,因此經常結合GPS數據,先定位到一個局部的地圖,然后在局部地圖的范圍內進行匹配,降低計算量。
這種方法的理論上精度很高,但也有短板,比如在天氣不佳時激光雷達的測量會受到影響;再比如道路環發生變化,高清地圖就要迅速修正,否則會影響匹配。
2. 高清視覺地圖匹配
視覺地圖匹配和激光匹配的原理類似。裝有高清攝像頭的地圖采集車采集和制備高精度視覺地圖,自動駕駛車行駛過程中,攝像頭實時采集數據和高清地圖數據比照,確定位置。
視覺所用的攝像頭相對于激光雷達很便宜,但也面臨兩個主要問題:一個是對光照條件要求高,光照不足、光照過強、視野模糊等,都會導致圖像的像素值發生較大變化,導致匹配失敗;另外一個是算力要求高,實時的圖片搜索匹配需要大量算力,往往需要使用GPU。
I 相對定位--慣性傳感器(IMU)
不同于GPS和點云地圖的絕對定位方法,慣導(IMU,Inertial measurement unit)通過測量加速度和角速度得到目標運動狀態,從而計算出下一時刻的速度和行進到的位置,實現相對定位。
自動駕駛應用中,GPS和慣導(IMU)功能非常互補:慣導(IMU)計算的下一時刻位置是根據上一時刻位置推導,誤差會一直累計下去,長時間運行后精度不能達到自動駕駛要求,所以隔一段時間就需要校準修正一次,相對準確的GPS就成了校準IMU的神器。于此同時,IMU更新頻率高,通常為1kHZ,也能彌補GPS更新頻率低的不足。

I 相對定位--視覺里程計(VO)
視覺里程計(VO,VisualOdometry)顧名思義是用視覺的方法,確定自己的位置,是一種相對定位法。基本思想是基于自動駕駛攝像頭(單目、雙目)傳感器獲取的連續圖像信息,估算相鄰時間點兩幅圖像的位移,測度運動物體的位置變化。而將位置變化累計起來,就可以推算物體的運動軌跡,從而找到物體的位置。這種通過測度相對位移來推算位置的思想和IMU類似。
視覺里程計測量,首先需要將相鄰圖像關聯,通過對比圖像的變化,計算相對位移。但直接匹配兩幅圖上的像素,算力代價太大,所以通常選擇容易識別且比較穩定的點作為代表,比如物體的角點、邊緣點等,來建立相鄰兩幅圖的關系聯系,這就是特征點法。再通過特征點在相鄰圖像的位移變化,計算出目標的相對運動。
類似視覺高清地圖,視覺里程計也有光線條件要求高、算力要求大的問題。無論是特征點的提取、特征點匹配還是相對運動的計算,都要求有高精度圖片和高算力的支持。
I 小結
真實場景自動駕駛,往往要面臨信號弱、延時等問題,特別是在高架橋、隧道等復雜場景,更需要結合多種定位方法使用。自動駕駛大腦通過分析,選取出各種方法定位指向的概率最大的位置,作為最終定位結果。
推薦閱讀
▼
▎本文來源:從0到1看科技,智車科技(IV_Technology)整理編輯,轉載請注明來源。如有侵權請第一時間聯系我們。
-
接收器
+關注
關注
14文章
2458瀏覽量
71806 -
gps
+關注
關注
22文章
2886瀏覽量
166055 -
自動駕駛
+關注
關注
783文章
13694瀏覽量
166166
原文標題:【自動駕駛定位篇】看如何找準位置
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【話題】特斯拉首起自動駕駛致命車禍,自動駕駛的冬天來了?
自動駕駛真的會來嗎?
細說關于自動駕駛那些事兒
自動駕駛的到來
UWB主動定位系統在自動駕駛中的應用實踐
自動駕駛汽車的定位技術
如何讓自動駕駛更加安全?
UWB高精度定位在自動駕駛中的應用前景
UWB定位可以用在自動駕駛嗎
自動駕駛系統設計及應用的相關資料分享
自動駕駛定位概述

高精自動駕駛中的地圖匹配定位技術
GNSS中高精度定位定向模組M20助力自動駕駛車輛精準定位
GNSS中高精度定位定向模組M20助力自動駕駛車輛精準定位






 工商網監
工商網監
評論