 飛控系統到底是什么?飛行控制系統的功能
飛控系統到底是什么?飛行控制系統的功能
埃塞俄比亞航空公司波音737 MAX 8型客機當地時間10日墜毀,這是時隔不到5個月,波音同一型號飛機發生的第二起空難。鑒于兩起事故具有明顯的相似性,越來越多的將目標指向了該型號的設計缺陷——飛控系統存在BUG是導致這兩起事故的根本原因。目前,越來越多的國家和航空公司已宣布停飛該機型。
那么,飛控系統到底是什么?為什么一個小小的代碼錯誤會導致這么嚴重的后果?下面,就由小編來帶你作進一步的深入了解。
實際上,現代民用飛機飛行控制系統(簡稱“飛控”),是整個飛機機載系統的核心,也是整架飛機最復雜的系統之一。
飛行控制系統的作用是保證飛機的穩定性和操縱性,提高飛機飛行性能和完成任務的能力,增強飛行的安全性和減輕駕駛員的工作負擔。飛控系統分為人工飛行控制系統和自動飛行控制系統兩大類。由駕駛員通過對駕駛桿和腳蹬的操縱實現控制任務的系統,稱為人工飛行控制系統。最簡單的人工飛行控制系統就是機械操縱系統。不依賴于駕駛員操縱駕駛桿和腳蹬指令而自動完成控制任務的飛控系統,稱為自動飛行控制系統。
飛行控制系統的功能
隨著飛行任務的不斷復雜化,對飛機性能的要求越來越高,不僅要求飛行距離遠(例如運輸機),高度高(高空偵察機),而且還要求飛機有良好的機動性(例如戰斗機)。為了減輕駕駛員在長途飛行中的疲勞,或使駕駛員集中精力戰斗,希望用自動控制系統代替駕駛員控制飛行,并能改善飛機的飛行性能。這種系統就是現代飛機上安裝的飛行自動控制系統。
飛行控制系統的功能歸結起來有兩點:1、實現飛機的自動飛行;2、改善飛機的飛行性能。
飛機的自動飛行控制系統在無人參與的情況下,自動操縱飛機按規定的姿態和航跡飛行,通常可實現對飛機的三軸姿態角和飛機三個方向的空間位置的自動控制與穩定。例如,無人駕駛飛行器(如無人機或導彈等),實現完全的飛行自動控制;對于有人駕駛的飛機(如民用客機或軍用飛機),雖然有人參與駕駛,但某些飛行階段(如巡航段),駕駛員可以不直接參與操縱,而由飛行控制系統實現對飛機飛行的自動控制,但駕駛員應完成對自動飛行指令的設置和監督自動飛行的情況,并可以隨時切斷自動控制而實現人工駕駛。
采用自動飛行具有以下優點:
1、長距離飛行時解除駕駛員的疲勞,減輕駕駛員的工作負擔;
2、在一些惡劣天氣或復雜的環境下,駕駛員難于精確控制飛機的姿態和航跡,自動飛行控制系統可以精確對飛機姿態和航跡的精確控制;
3、有一些飛行操縱任務,駕駛員難于精確完成,如進場著陸,采用自動飛行控制則可以較好地完成任務。
一般來說,飛機的性能和飛行品質是由飛機本身氣動特性和發動機特性決定的,但隨著飛機飛行高度及飛行速度的增加,飛機的自身特性將會變壞。如飛機在高空飛行時,由于空氣稀薄,飛機的阻尼特性變壞,致使飛機角運動產生嚴重的擺動,靠駕駛員人工操縱將會很困難。此外,設計飛機時,為了減小質量和阻力,提高有用升力,將飛機設計成靜不穩定的。對于這種靜不穩定的飛機,駕駛員是難于操縱的。在飛機上采用增穩系統或阻尼系統可以很好地解決這些問題。
飛控系統的發展歷史
自動飛行控制系統已有一百多年的研制歷史。1891年海諾姆·馬克西設計和建造的飛行器上就安裝了改善飛行器縱向穩定性的飛行控制系統。
后來,直到二十世紀初,由于飛行器本身性能的不斷改善,而自動控制理論也處于發展初期,因此飛行器的自動控制發展緩慢;
二十世紀中期以后,隨著飛行任務的不斷復雜化,對飛行器性能要求越來越高,如希望運輸機飛行距離要遠,偵察機飛行高度要高,而戰斗機要有良好的機動性,希望飛機便于操縱,減輕飛行員的負擔,這就使自動控制成了不可回避的問題,這樣就出現了飛行控制系統。
1、1912:愛莫爾.斯派雷,電動陀螺穩定裝置,自動駕駛儀誕生;
2、埃爾默?斯佩里后來又發明了陀螺羅盤、陀螺地平儀和側滑指示器等一系列飛行儀表,使飛行員可以在夜間和復雜氣象條件下,按儀表指示操縱飛機,對人類航空技術發展作出了突出的貢獻。
飛機操縱系統的第二次重大突破是電傳操縱系統的出現。電傳操縱系統真正使用于飛機,發生在20世紀70年代。在采用電傳操縱系統的飛機上,沒有了傳統的鋼索和連桿等機械傳動機構,飛行員完全通過電信號來操縱飛機。
1975年,美國空軍在A-7D型飛機上試驗數字戰術飛行控制系統時,開始使用光纖作為數據傳輸線。光纖技術和數字式電傳操縱系統相結合,產生了光傳操縱系統的概念。
50年代前自動駕駛儀用于運輸機和轟炸機的平飛。(飛機自動駕駛儀逐漸與機上其他裝置耦合以控制航跡(定高和自動下滑等),既能穩定飛機,又能全面控制飛機,直至全自動著陸。
60年代自動駕駛儀功能擴展成為飛行控制系統,產生了隨控布局飛行器設計新思想。
80年代已在研制把火控系統、推進裝置控制系統和飛行控制系統集成為火/飛/推綜合控制系統,以使各系統協同工作,更完善地完成飛行任務。
飛控系統的組成
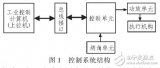
飛控系統由控制與顯示裝置、傳感器、飛控計算機、作動器、自測試裝置、信息傳輸鏈及接口裝置組成。
控制及顯示裝置是駕駛員輸入飛行控制指令和獲取飛控系統狀態信息的設備,包括駕駛桿、腳蹬、油門桿、控制面板、專用指示燈盤和電子顯示器(多功能顯示器、平視顯示器等)。
傳感器為飛控系統提供飛機運動參數(航向角、姿態角、角速度、位置、速度、加速度等)、大氣數據以及相關機載分系統(如起落架、機輪、液壓源、電源、燃油系統等)狀態的信息,用于控制、導引和模態轉換。
飛控計算機是飛控系統的“大腦”,用來完成控制邏輯判斷、控制和導引計算、系統管理并輸出控制指令和系統狀態顯示信息。
作動器是飛控系統的執行機構,用來按飛控計算機指令驅動飛機的各種舵面、油門桿、噴管、機輪等,以產生控制飛機運動的力和力矩。
自測試裝置用于飛行前、飛行中、飛行后和地面維護時對系統進行自動監測,以確定系統工作是否正常并判斷出現故障的位置。
信息傳輸鏈用于系統各部件之間傳輸信息。常用的傳輸鏈有電纜、光纜和數據總線。接口裝置用于飛控系統和其他機載系統之間的連接,不同的連接情況可以有多種不同的接口形式。
飛控系統的工作原理
人工駕駛飛機基本過程
如果飛機在平飛過程中,由于某中外界干擾使飛機抬頭,不在保持水平狀態。駕駛員從地平儀上觀察到這個姿態角(俯仰角)的變化,反映到大腦中,經過思維判斷立即做出如何操縱飛機的決定,指揮手去推動駕駛桿,驅動升降舵向下偏轉,產生相應的下俯力矩,使飛機低頭恢復水平姿態。駕駛員又從儀表上看到這一變化,逐漸把駕駛桿收回原位。當飛機回到原態(水平)時,駕駛桿和升降舵也回到原位。整個過程如圖所示。
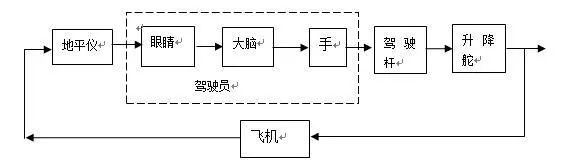
這是一個反饋系統,即閉環系統。圖中虛線表示駕駛員,如果用自動駕駛儀代替駕駛員控制飛機飛行,自動駕駛儀必須包括與虛線框內三個部分相應的裝置,并與飛機組成一個閉環系統。
自動飛行的原理
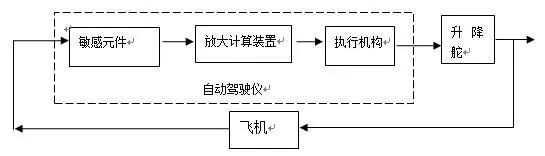
當飛機偏離原始狀態,敏感元件感受到偏離方向和大小,并輸出相應信號,經放大、計算處理,操縱執行機構(如舵機),使控制面(例如升降舵面)相應偏轉。由于整個系統是按負反饋原則連接的,其結果使飛機趨向原始狀態。當飛機回到原始狀態時,敏感元件輸出信號為零,舵機以及與其相連接的舵面也回到原位,飛機重新按原始狀態飛行。
由此可見,自動駕駛儀中的敏感元件、放大計算裝置和執行機構可代替駕駛員的眼睛、大腦神經系統和肢體,自動地控制飛機的飛行。這三部分是自動飛行控制系統的核心,即自動駕駛儀。
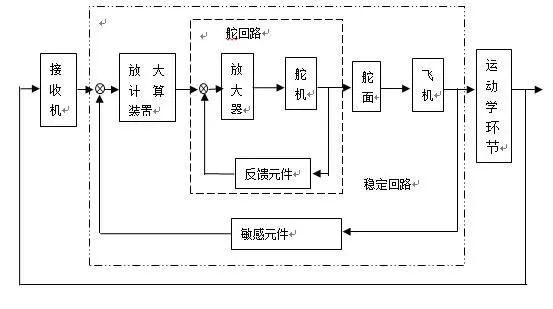
為改善舵機的性能,通常執行機構引入內反饋(將舵機的輸出反饋到輸入端)形成隨動系統(或稱伺服回路),簡稱為舵回路。舵回路是由舵機、放大器及反饋元件組成,如圖虛線框內所示。
反饋元件包括測速機和/或位置傳感器。測速機測出舵面偏轉的角速度,反饋給放大器以增大舵回路的阻尼,改善舵回路的性能,位置傳感器將舵面位置反饋到舵回路的輸入端,使控制信號與舵面偏角一一對應。舵回路的負載是舵面的慣量和作用在舵面上的氣動力矩(鉸鏈力矩)。
自動駕駛儀與飛機組成一個回路——通常稱為穩定回路。這個回路的主要功能是穩定飛機的姿態,或者說穩定飛機的角運動。敏感元件用來測量飛機的姿態角。由于該回路中,包含了飛機,而飛機的動態特性又隨飛行條件(如速度、高度等)而異,使穩定回路的分析變得較復雜。
如果用敏感元件測量飛機的重心位置,而飛機還包含了運動學環節(表征飛機空間位置幾何關系的環節),這樣組成一個更大的新回路,控制回路(或控制與導引回路,簡稱制導回路)。
以飛機自動下滑著陸系統為例,說明控制原理。這里只說飛機的縱向(俯仰、上下和前后)運動。要求飛機在著地前沿預定航跡下滑到預定高度(十幾米),然后將飛機拉平,飛機不斷下降,最終以允許的下降速率著陸。預定的下滑航跡是由機場的無線電裝置形成的。
飛機處于預定下滑航跡,飛機上相應的無線電接收機輸出信號為零。飛機偏離下滑航跡,接收輸出相應極性和幅值的信號,送至穩定回路,在自動駕駛儀的控制下飛機回到下滑航跡。例如飛機在預定下滑航跡的上方,接收機將某極性的信號送給自動駕駛儀使升降舵下偏,產生低頭控制力矩,使飛機進入下滑航跡。飛機進入下滑航跡后,接收機輸出為零,舵偏角為零,飛機保持在下滑航跡上。飛機重心的運動(即空間位置的變化)是通過控制飛機角運動來實現的。
自動飛行控制系統的組成
自動飛行控制系統由自動駕駛儀、自動油門桿系統、自動導航系統、自動進場系統和自動著陸系統、自動地形跟隨/回避系統構成。
自動駕駛儀
顧名思義,自動駕駛儀是用來代替駕駛員操縱飛機的自動控制系統。它由控制顯示面板、傳感器、自動駕駛儀計算機和舵面作動器組成。
自動駕駛儀的傳感器信息主要來自航空電子系統的航向/姿態參考基準、高度和高度差信號。它的主要功能是航向角、姿態角的給定和保持以及飛行高度(包括氣壓高度和相對高度)的給定和保持。在長時間的穩定飛行(如巡航)中使用自動駕駛儀控制飛機,可以大大減輕駕駛員的工作負擔。
自動油門桿系統
自動油門桿系統是一種經常與自動駕駛儀配合使用的系統。它通過驅動油門桿改變發動機推力而對飛機的飛行速度(或馬赫數)進行自動控制。
系統使用的傳感器信息是大氣數據計算機的飛行速度(或馬赫數)信號。一般不具備獨立的計算機而由自動駕駛儀計算機完成控制律計算。執行機構是油門桿作動器。自動油門桿與自動駕駛儀配合工作,可以精確控制飛機的航跡、姿態及飛行速度。這對于飛機的自動進場/著陸、自動地形跟隨/回避以及四維制導飛行,都起著非常重要的作用。
自動導航系統
自動駕駛儀與導航系統交聯,即構成自動導航系統。導航系統通過總線或其他裝置(如飛行管理計算機)將飛機當前的位置和航向偏差信號送入自動駕駛儀計算機,由自動駕駛儀計算機形成并輸出控制指令,將飛機的位置和航向調整到并保持在預先給定的航線上飛行。
自動著陸系統
著陸是飛行器航行中的一個重要階段。著陸時,飛行員必須在很短的時間內完成許多要求很高的操作,若僅靠目視著陸,為保證安全,飛行員需要在很遠的距離上就能清晰的看到跑道。以民航飛機為例,要求在飛行高度不低于300m時,水平能見度不小于4.8km。為了保證飛機能在夜間或不良氣候條件下安全著陸,必須由無線電導航系統向飛行員提供飛行器與正確的下滑航道之間偏離程度的高精度指示。
常用的進場和著陸導引系統有儀表著陸系統、微波著陸系統和精密進場雷達/數據鏈導引系統等。20世紀90年代以來,基于全球定位系統(GPS)的進場著陸導引技術發展迅速,將成為21世紀進場著陸導引系統的主流。自動著陸系統利用導引信號將飛機控制到預定航道,并沿著航道下滑和著陸。
目前民航機場主要使用的著陸無線電導航系統為儀表著陸系統 (ILS,Instrument Landing System)和微波著陸系統 (MLS,Microwave Landing System)。前者可引導飛機在I類氣象條件(水平能見度800m,決斷高度60m)或II類氣象條件(水平能見度400m,決斷高度30m)下著陸(稱為儀表著陸或盲目著陸);后者可引導飛機在III類氣象條件(水平能見度低于200m及其以下,決斷高度0m)下著陸(稱為自動著陸)。
對飛機自動著陸來說,儀表著陸和微波著陸系統都是使用非目視著陸引導設備,其基本原理都由機場上的儀表著陸和微波著陸系統在跑道上空形成下滑道,飛機上安裝了相應的無線電接收機,當飛機處于預定下滑道上時,接收機輸出信號為零;若飛機偏離下滑道,則接收機輸出相應極性和幅值的信號。接收機輸出的電信號通過自動駕駛儀操縱舵面(一般方向舵和升降舵),使飛機進入下滑道。例如設飛機處于下滑道上方,接收機將輸出反映上方極性的信號,通過自動駕駛儀使升降舵面后緣向下,產生低頭力矩,使飛機飛向下滑道,接收機輸出逐漸減小,直至飛機進入下滑道輸出為零,升降舵面恢復原來位置,飛機保持在下滑道上逐漸降低高度,實現自動著陸。
自動地形跟隨/回避系統
自動地形跟隨/回避系統用于控制軍用飛機在超低空(一般指相對高度100m以下的空域)突破敵人防線的飛行,利用地形、地物造成的雷達盲區和雜波反射進行隱蔽,使敵人防空雷達很難發現。使用自動駕駛儀和自動油門桿系統基本部件與地形探測和定位系統相交聯,可用于實現自動地形跟隨/回避功能。
常用的地形探測和定位系統是地形跟隨和地物回避雷達。目前,一些先進的軍用飛機已經采用慣性導航/全球定位系統的組合導航系統(INS/GPS)與三維數字地圖相配合的自主定位系統作為自動地形跟隨/回避系統的主信息源,以低可探測性的激光測距器等為輔助手段實現超低空突防飛行,進一步提高了低空突防的隱蔽性。
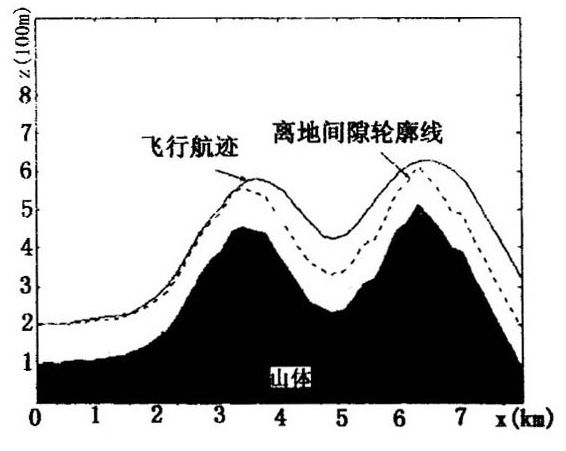
自動控制飛機沿地形垂直剖面上空飛行的系統,稱為自動地形跟隨系統。自動地形跟隨/回避系統則可以控制飛機按預定航線繞過山峰在“山溝”里飛行,飛行軌跡是三維的,具有更好的隱蔽性。
-
飛行器
+關注
關注
13文章
717瀏覽量
45470 -
無人駕駛
+關注
關注
98文章
4031瀏覽量
120299 -
飛控系統
+關注
關注
20文章
52瀏覽量
25775
原文標題:一文讀懂民航客機飛控系統
文章出處:【微信號:WW_CGQJS,微信公眾號:傳感器技術】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【AWorks280試用申請】基于STM32的四旋翼飛行器控制系統設計
基于C8051單片機的超小型無人飛行器舵機控制系統
基于ARM的小型無人直升機飛行控制系統設計
基于ATmegal28的無人機控制系統硬件設計

基于DSP飛行仿真轉臺控制系統設計
飛機飛行控制系統通用測試平臺設計和實現

如何使用STM32單片機進行無人機飛行控制系統設計
基于Backstepping的飛行控制系統設計_董龍德






 工商網監
工商網監
評論