 用塑料瓶蓋制作四軸無人機
用塑料瓶蓋制作四軸無人機
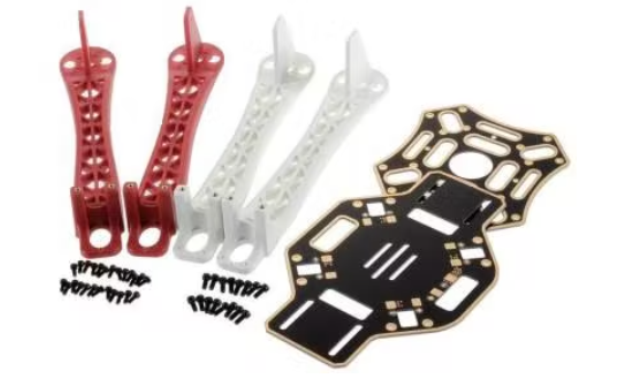
四軸飛行器的四個螺旋槳都是電機直連的簡單機構,十字形的布局允許飛行器通過改變電機轉速獲得旋轉機身的力,從而調整自身姿態。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
DIY
+關注
關注
176文章
886瀏覽量
348279 -
無人機
+關注
關注
228文章
10355瀏覽量
179684
發布評論請先 登錄
相關推薦
四軸無人機設計
畢設四軸無人機考研結束了,不出意外考的很差,老師在考試之前就說過我有些浮躁,我現在有點懷疑自己的能力了,等二戰吧,畢業論文開始了。這次采用的是匿名科創的拓空者飛控,stm32f407主控板,其實我
發表于 07-19 08:05
制作無人機的小型PCB
描述使用 ESP32 的無人機飛控這是我們制作自己的無人機的小型 PCB,它使用 ESP32 和 MPU-6050 進行軸控制。電機控制是通過 PWM 完成的。我們仍在忙于對其進行編程
發表于 08-01 07:04





 工商網監
工商網監
評論