") 最新傳感器技術(shù):MEMS陀螺儀在任何情況下都能精確的慣性傳感
最新傳感器技術(shù):MEMS陀螺儀在任何情況下都能精確的慣性傳感
越來(lái)越多的應(yīng)用需要從位于極高溫度環(huán)境中的傳感器收集數(shù)據(jù)。近年來(lái),在半導(dǎo)體,無(wú)源器件和互連中取得了相當(dāng)大的進(jìn)步,以實(shí)現(xiàn)高精度數(shù)據(jù)采集和處理。然而,對(duì)于可以在高達(dá)175°C的溫度下工作的傳感器仍然存在未滿足的需求,特別是在微機(jī)電系統(tǒng)(MEMS)提供的易于使用的形狀因子中。與傳感器等效傳感器相比,MEMS傳感器通常更小,功率更低,成本更低。此外,他們還可以在同一半導(dǎo)體封裝中集成信號(hào)調(diào)理電路。
高溫MEMS加速度計(jì)-ADXL206已經(jīng)發(fā)布,可提供高精度傾斜(傾斜)測(cè)量。然而,仍然需要額外的自由度來(lái)精確地測(cè)量系統(tǒng)在惡劣環(huán)境應(yīng)用中的運(yùn)動(dòng),其中最終產(chǎn)品可能受到嚴(yán)重的沖擊,振動(dòng)和劇烈運(yùn)動(dòng)。這種類型的濫用可能導(dǎo)致系統(tǒng)過(guò)度磨損和早期故障,從而導(dǎo)致維護(hù)或停機(jī)成本高。
為了滿足這一需求,ADI公司開(kāi)發(fā)了一種帶有集成信號(hào)調(diào)理功能的新型高溫MEMS陀螺儀, ADXRS645。該傳感器即使在存在沖擊和振動(dòng)的情況下也能實(shí)現(xiàn)精確的角速率(轉(zhuǎn)速)測(cè)量,額定溫度可達(dá)175°C。
操作原理
MEMS陀螺儀通過(guò)科里奧利加速度測(cè)量角速率。科里奧利效應(yīng)可以解釋如下,從圖1開(kāi)始。考慮自己站在靠近中心的旋轉(zhuǎn)平臺(tái)上。您相對(duì)于地面的速度顯示為藍(lán)色箭頭長(zhǎng)度。如果你要移動(dòng)到靠近平臺(tái)外緣的點(diǎn),你的速度會(huì)相對(duì)于地面增加,如較長(zhǎng)的藍(lán)色箭頭所示。由徑向速度引起的切向速度的增加率是科里奧利加速度。
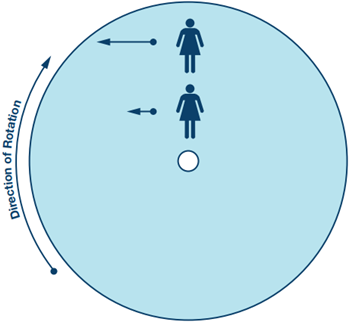
如果Ω是角速率而 r 是半徑,切向速度為Ωr。因此,如果r以速度v變化,則會(huì)出現(xiàn)切向加速度Ωv。這是科里奧利加速度的一半。另外一半是改變徑向速度的方向,總共提供2Ωv。如果你有一個(gè)質(zhì)量(M),平臺(tái)必須施加一個(gè)力 - 2MΩv-來(lái)引起加速度,并且質(zhì)量會(huì)經(jīng)歷相應(yīng)的反作用力。 ADXRS645通過(guò)使用類似于在旋轉(zhuǎn)平臺(tái)上移出和移出的人的共振質(zhì)量來(lái)利用這種效果。質(zhì)量由多晶硅微加工而成,并與多晶硅框架相連,因此它只能沿一個(gè)方向共振。
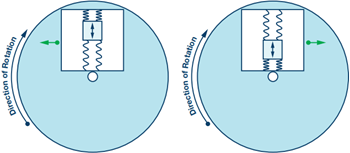
圖2顯示當(dāng)共振質(zhì)量向旋轉(zhuǎn)的外邊緣移動(dòng)時(shí),它會(huì)加速向右并向框架施加向左的反作用力。當(dāng)它向旋轉(zhuǎn)中心移動(dòng)時(shí),它會(huì)向右施加一個(gè)力,如綠色箭頭所示。
為了測(cè)量科里奧利加速度,包含共振質(zhì)量的框架通過(guò)相對(duì)于共振運(yùn)動(dòng)成90°的彈簧系在基板上,如圖3所示。該圖還顯示科里奧利感應(yīng)指用于通過(guò)電容轉(zhuǎn)換來(lái)感應(yīng)框架的位移,以響應(yīng)質(zhì)量所施加的力。
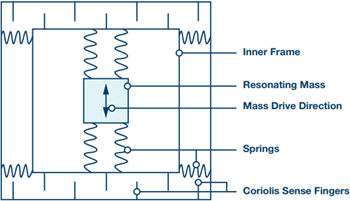
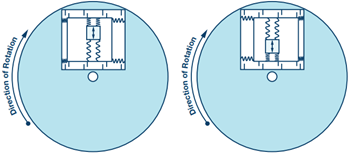
圖4顯示了完整的結(jié)構(gòu),表明當(dāng)共振質(zhì)量移動(dòng)時(shí)陀螺儀安裝的表面旋轉(zhuǎn),質(zhì)量及其框架經(jīng)歷科里奧利加速度并從振動(dòng)運(yùn)動(dòng)平移90°。隨著旋轉(zhuǎn)速率的增加,質(zhì)量的位移和從相應(yīng)的電容變化得到的信號(hào)也增加。應(yīng)該注意的是,陀螺儀可以放置在旋轉(zhuǎn)物體上的任何位置并且可以任何角度,只要其感測(cè)軸平行于旋轉(zhuǎn)軸即可。
電容式感應(yīng)
ADXRS645通過(guò)連接到諧振器的電容式感應(yīng)元件測(cè)量共振質(zhì)量及其框架的位移,這是由于科里奧利效應(yīng),如圖4所示。這些元件是硅梁與連接到基板的兩組固定硅梁相互交叉,從而形成兩個(gè)標(biāo)稱相等的電容器。由于角速率引起的位移會(huì)在該系統(tǒng)中產(chǎn)生差分電容。
在實(shí)踐中,科里奧利加速度是一個(gè)非常小的信號(hào),產(chǎn)生幾分之一的光束偏轉(zhuǎn)和相應(yīng)的電容變化,大小為zeptofarads。因此,最小化對(duì)寄生源的交叉敏感性是極其重要的,例如溫度,封裝應(yīng)力,外部加速度和電噪聲。這是通過(guò)將電子器件(包括放大器和濾波器)置于與機(jī)械傳感器相同的芯片上來(lái)實(shí)現(xiàn)的。然而,在信號(hào)鏈盡可能遠(yuǎn)的地方進(jìn)行差分測(cè)量更重要,并將信號(hào)與諧振器速度相關(guān)聯(lián),尤其是處理外部加速度的影響。
振動(dòng)抑制
理想情況下,陀螺儀只對(duì)旋轉(zhuǎn)速率敏感,而不是其他任何東西。在實(shí)踐中,由于其機(jī)械設(shè)計(jì)的不對(duì)稱性和/或微機(jī)械加工不精確性,所有陀螺儀都對(duì)加速度具有一定的敏感性。事實(shí)上,加速度靈敏度有多種表現(xiàn)形式 - 其嚴(yán)酷程度因設(shè)計(jì)而異。最重要的通常是對(duì)線性加速度(或 g 靈敏度)和振動(dòng)校正(或 g 2 靈敏度)的敏感性,并且可能非常嚴(yán)重到完全淹沒(méi)了零件的額定偏置穩(wěn)定性。當(dāng)速率輸入超出額定測(cè)量范圍時(shí),一些陀螺儀的輸出從軌道擺動(dòng)到軌道。其他陀螺儀在受到小到幾百的沖擊時(shí)會(huì)有鎖定的傾向。這些陀螺儀不會(huì)受到?jīng)_擊的損壞,但它們不再響應(yīng)速率,需要重新啟動(dòng)才能重新啟動(dòng)。
ADXRS645采用了一種新穎的角速率傳感方法,可以抑制沖擊高達(dá)1000 g - 它使用四個(gè)諧振器來(lái)差分檢測(cè)信號(hào)并抑制與角運(yùn)動(dòng)無(wú)關(guān)的共模外部加速度。圖5中的頂部和底部諧振器對(duì)是機(jī)械獨(dú)立的,并且它們反相運(yùn)行。結(jié)果,它們測(cè)量相同的旋轉(zhuǎn)幅度,但給出相反方向的輸出。因此,傳感器信號(hào)之間的差異用于測(cè)量角速率。這取消了影響兩個(gè)傳感器的非旋轉(zhuǎn)信號(hào)。信號(hào)在前置放大器之前的內(nèi)部硬連線中組合。因此,極大地阻止了極端加速度過(guò)載到達(dá)電子設(shè)備 - 從而允許信號(hào)調(diào)節(jié)在大沖擊期間保持角速率輸出。
傳感器實(shí)現(xiàn)
圖6顯示了陀螺儀及相關(guān)驅(qū)動(dòng)和感應(yīng)電路的簡(jiǎn)化原理圖。
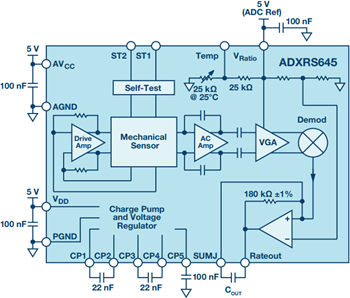
諧振器電路檢測(cè)諧振質(zhì)量的速度,放大并驅(qū)動(dòng)諧振器,同時(shí)保持相對(duì)于科里奧利信號(hào)路徑的良好控制的相位(或延遲)。科里奧利電路用于通過(guò)下游信號(hào)處理來(lái)檢測(cè)加速度計(jì)框架的運(yùn)動(dòng),以提取科里奧利加速度的大小并產(chǎn)生與輸入旋轉(zhuǎn)速率一致的輸出信號(hào)。此外,自檢功能會(huì)檢查包括傳感器在內(nèi)的整個(gè)信號(hào)鏈的完整性。
應(yīng)用示例
其中一個(gè)最苛刻的在石油和天然氣井下鉆井行業(yè)中可以遇到電子設(shè)備的環(huán)境。這些系統(tǒng)利用多個(gè)傳感器來(lái)更好地了解鉆柱在地面下的運(yùn)動(dòng),優(yōu)化操作并防止損壞。以RPM為單位測(cè)量的鉆削速度是鉆機(jī)操作員始終需要知道的關(guān)鍵指標(biāo)。傳統(tǒng)上,這是用磁力計(jì)計(jì)算的。然而,磁力計(jì)受到鉆井套管和周圍鉆孔中存在的含鐵材料的干擾。它們也必須安裝在特殊的非磁性鉆鋌(外殼)中。
除了簡(jiǎn)單的RPM測(cè)量之外,人們?cè)絹?lái)越關(guān)注理解鉆柱的運(yùn)動(dòng)或鉆井動(dòng)力學(xué)以最佳地管理諸如施加的力量,旋轉(zhuǎn)速度和轉(zhuǎn)向之類的參數(shù)。管理不善的鉆井動(dòng)力學(xué)可能導(dǎo)致鉆頭的高振動(dòng)和極不穩(wěn)定的運(yùn)動(dòng),導(dǎo)致到目標(biāo)區(qū)域的鉆井時(shí)間更長(zhǎng),設(shè)備過(guò)早失效,難以操縱鉆頭,以及井本身受損。在極端情況下,設(shè)備可能會(huì)被破壞并留在井中,然后必須以非常高的成本回收。
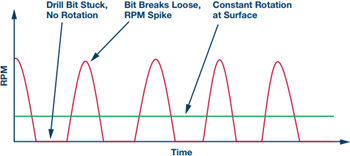
鉆井參數(shù)管理不善導(dǎo)致的一種特別有害的運(yùn)動(dòng)被稱為粘滑。粘滑是鉆頭卡住的現(xiàn)象,但鉆柱的頂部繼續(xù)旋轉(zhuǎn)。當(dāng)鉆頭卡住時(shí),鉆柱的底部會(huì)卷起,直到它產(chǎn)生足夠的扭矩來(lái)松動(dòng),通常是猛烈的。當(dāng)發(fā)生這種情況時(shí),在鉆頭處發(fā)生大的旋轉(zhuǎn)速率尖峰。粘滑傾向于周期性地發(fā)生并且可以持續(xù)很長(zhǎng)一段時(shí)間。粘滑的典型RPM響應(yīng)如圖7所示。由于表面的鉆柱繼續(xù)正常旋轉(zhuǎn),鉆井操作員通常不知道這種破壞性現(xiàn)象發(fā)生在井下。
此應(yīng)用的關(guān)鍵測(cè)量是對(duì)鉆頭附近轉(zhuǎn)速的精確,高采樣率測(cè)量。諸如振動(dòng)抑制ADXRS645之類的陀螺儀非常適合此任務(wù),因?yàn)闇y(cè)量與鉆柱的任何線性運(yùn)動(dòng)分離。當(dāng)存在高振動(dòng)和不穩(wěn)定運(yùn)動(dòng)時(shí),從磁力計(jì)計(jì)算的旋轉(zhuǎn)速率會(huì)受到噪聲和誤差的影響。基于陀螺儀的解決方案可提供轉(zhuǎn)速的瞬時(shí)響應(yīng),并且不依賴于過(guò)零點(diǎn)或其他可能受沖擊和振動(dòng)影響的算法。
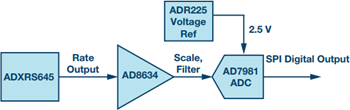
此外,基于陀螺儀的電路比磁通門(mén)磁力計(jì)解決方案更小,所需的元件更少,磁通門(mén)磁力計(jì)解決方案需要多個(gè)磁力計(jì)軸和額外的驅(qū)動(dòng)電路。信號(hào)調(diào)理集成在ADXRS645中。支持高溫IC對(duì)陀螺儀模擬輸出進(jìn)行采樣和數(shù)字化,采用低功耗,低引腳數(shù)封裝。具有數(shù)字輸出的175°C額定陀螺儀電路可通過(guò)圖8所示的簡(jiǎn)化信號(hào)鏈實(shí)現(xiàn)。數(shù)據(jù)采集電路的完整參考設(shè)計(jì)可在www.analog.com/cn0365 上獲得。
摘要
本文介紹了第一款額定用于高溫175°C操作的MEMS陀螺儀-ADXRS645。該傳感器可在惡劣環(huán)境應(yīng)用中實(shí)現(xiàn)精確的角速率測(cè)量,從而抑制沖擊和振動(dòng)的影響。陀螺儀由一系列高溫IC支持,以獲取處理信號(hào)。有關(guān)ADI公司高溫產(chǎn)品的更多信息,請(qǐng)?jiān)L問(wèn)www.analog.com/hightemp。
-
mems
+關(guān)注
關(guān)注
129文章
3899瀏覽量
190360
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
MEMS陀螺儀系統(tǒng)的精確導(dǎo)航
MEMS陀螺儀中主要噪聲源的預(yù)測(cè)和管理
MEMS陀螺儀中主要噪聲源的預(yù)測(cè)和管理
體聲波陀螺儀傳感器引發(fā)慣性MEMS應(yīng)用新變革
裝配MEMS慣性傳感器的實(shí)用方法
手持陀螺儀傳感器原理
基于MEMS慣性感測(cè)技術(shù)的應(yīng)用變革
常見(jiàn)的七大陀螺儀
地磁傳感器與陀螺儀區(qū)別是什么
戰(zhàn)術(shù)導(dǎo)彈對(duì)MEMS慣性傳感器中的陀螺儀有哪四個(gè)要求?

陀螺儀傳感器的分類_陀螺儀傳感器有什么用
MEMS IMU/陀螺儀對(duì)準(zhǔn)的基礎(chǔ)知識(shí)

陀螺儀傳感器的應(yīng)用實(shí)例
MEMS加速度計(jì)與MEMS陀螺儀的區(qū)別

愛(ài)普生(EPSON) 慣性測(cè)量單元(IMU)、陀螺儀傳感器等模塊應(yīng)用領(lǐng)域選型介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論