 如何生成超聲圖像-B模式 如何影響前端組件選擇
如何生成超聲圖像-B模式 如何影響前端組件選擇
在設計超聲波前端電路時需要考慮一些主要的權衡因素。前端電路組件中的性能參數會影響診斷性能 - 相反,系統配置和目標會影響組件的選擇。
設計人員必須了解特別重要的規范及其影響關于系統性能,以及它們如何受到集成電路(IC)設計權衡的影響 - 在集成和半導體工藝技術方面 - 這將限制用戶的設計選擇。了解這些考慮因素將有助于設計人員實現最有利的系統分區。我們從高級系統概述開始,然后更詳細地描述超聲系統的工作原理。
系統介紹
醫用超聲波機器是最復雜的信號處理機器之一今天用。與任何復雜的機器一樣,由于性能要求,物理和成本的原因,在實現中存在許多權衡。為了充分了解所需的前端IC功能和性能水平,有必要進行一些系統級的理解,特別是對于:低噪聲放大器(LNA);時間增益補償放大器(TGC);和模數轉換器(ADC)。
在超聲波前端以及許多其他復雜的電子系統中,這些模擬信號處理組件是決定整體系統性能的關鍵因素。前端組件特性定義了系統性能的限制;一旦引入噪聲和失真,幾乎不可能將它們移除。當然,這是任何接收信號處理鏈中的一般問題,無論是超聲波還是無線。
有趣的是,超聲波基本上是雷達或聲納系統,但它的運行速度很快與數量不同的數量級。典型的超聲系統在概念上與商用和軍用飛機上以及軍用船上的相控陣雷達系統幾乎相同。雷達工作在GHz范圍內,聲納范圍為kHz,超聲波工作在MHz范圍內。超聲設計者采用并擴展了使用相控陣的轉向光束原理,這是由雷達系統設計者提出的。今天,這些系統涉及一些最復雜的信號處理設備。
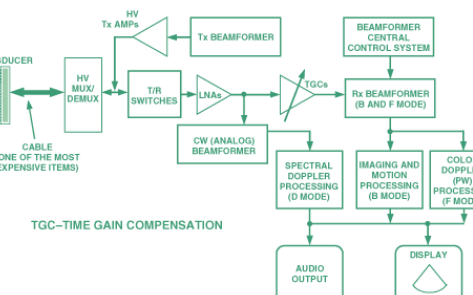
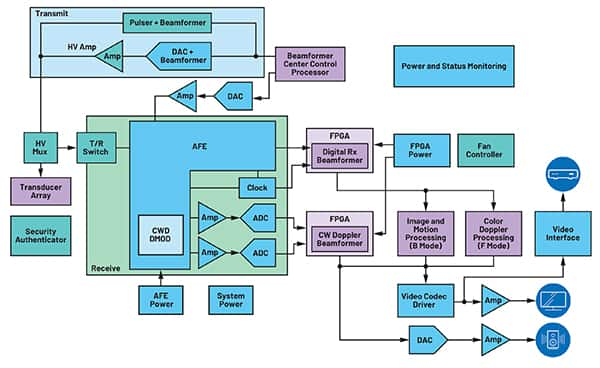
圖1顯示了超聲系統的簡化圖。在所有這樣的系統中,在相對長(約2米)的電纜的末端存在多元件換能器。該電纜包含48至256根微同軸電纜,是該系統中最昂貴的部件之一。在大多數系統中,幾個不同的傳感器探頭(也稱為手柄 - 手柄是包含傳感器元件并通過電纜連接到系統的裝置)可以連接到系統,允許操作員選擇合適的傳感器用于最佳成像。手柄通過高壓(HV)繼電器選擇,這為電纜增加了大的寄生電容。
HV復用器/解復用器用于某些陣列,以降低發送和接收硬件的復雜性,但代價是靈活性。最靈活的系統是相控陣數字波束形成器系統 - 由于需要對所有通道進行全電子控制,它們也往往是成本最高的系統。然而,今天最先進的前端IC,如AD8332可變增益放大器(VGA)和AD9238 12位模數轉換器(ADC)正在不斷降低每通道成本因此,即使在中低成本系統中,也正在引入所有元件的全電子控制。
在發送(Tx)側,Tx波束形成器確定設置所需的延遲模式和脈沖序列。傳輸焦點。然后,通過驅動換能器的高壓發射放大器放大波束形成器的輸出。這些放大器可以由數模轉換器(DAC)控制,以對發射脈沖進行整形,以便更好地將能量傳遞到換能器元件。通常,使用多個發射聚焦區域(區域) - 即,通過將發射能量聚焦在身體中逐漸更深的點處來加深要成像的場。多個區域的主要原因是,對于身體較深的點,發射能量需要更大,因為信號在進入體內時會衰減(并且當它返回時)。
On在接收(Rx)側,有一個T / R開關,通常是一個二極管橋,它阻止高壓Tx脈沖。接下來是低噪聲放大器(LNA)和一個或多個可變增益放大器(VGA),它們實現時間增益補償(TGC),有時還有變跡(空間“窗口”以減少波束中的旁瓣)功能。時間增益控制 - 為身體較深處的信號提供增加的增益(因此隨后到達) - 受操作員控制并用于保持圖像均勻性。
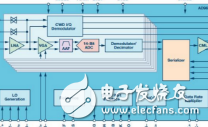
放大后,執行波束成形,以模擬(ABF)或數字(DBF)形式實現。除了連續波(CW)多普勒處理之外,它在現代系統中主要是數字的,其動態范圍仍然太大而不能通過與圖像相同的通道進行處理。最后,處理Rx光束以顯示灰度圖像,2-D圖像上的彩色流疊加和/或多普勒輸出。
超聲系統挑戰
要充分了解超聲波的挑戰及其對前端組件的影響,重要的是要記住這種成像模式正在努力實現的目標。首先,它應該準確地表示人體的內部器官,其次,通過多普勒信號處理,它確定體內的運動(例如,血流)。根據這些信息,醫生可以對心臟瓣膜或血管的正確功能做出結論。
采集模式
有三種主要的超聲波采集模式:B模式(灰色) - 成像; 2D); F模式(彩色血流或多普勒成像;血流);和D模式(頻譜多普勒)。 B模式創造了傳統的灰度圖像; F模式是B模式顯示器上的彩色覆蓋圖,顯示血流量; D模式是多普勒顯示,可能顯示血流速度及其頻率。 (還有一個M模式,它顯示一個B模式時間線。)
醫療超聲的工作頻率在1 MHz至40 MHz范圍內,外部成像機通常使用1 MHz至15 MHz的頻率,而靜脈心血管機使用的頻率高達40 MHz。原則上更高的頻率是更理想的,因為它們提供更高的分辨率 - 但是組織衰減限制了對于給定的穿透距離可以有多高的頻率。然而,由于信號經歷約1dB / cm / MHz的衰減,因此不能任意增加超聲頻率以獲得更精細的分辨率。即,對于10-MHz超聲信號和5cm的穿透深度,往返信號已經衰減5 3 2 3 10 = 100 dB!要在任何位置處理大約60 dB的瞬時動態范圍,所需的動態范圍將為160 dB(電壓動態范圍為1億到1)!這種幅度的動態范圍不能直接實現;因此,必須支付高度復雜系統的成本并在前端進行權衡 - 無論是穿透深度(由于允許的最大發射功率而受到安全規定的限制)還是圖像分辨率(使用較低的超聲頻率)。 / p>
接收信號的大動態范圍是最嚴峻的挑戰。前端電路必須同時具有非常低的噪聲和大信號處理能力 - 對于在通信需求方面經驗豐富的任何人來說都是熟悉的。電纜不匹配和損耗直接增加了系統的噪聲系數。例如,如果特定頻率的電纜損耗為2 dB,則NF降低2 dB。這意味著電纜之后的第一個放大器必須具有比無損電纜所需的噪聲系數低2 dB的噪聲系數。解決此問題的一種可能方法是將放大器置于換能器手柄中。但是,存在嚴重的尺寸和功率限制;此外,對高壓發射脈沖的保護需要使這種解決方案難以實現。
另一個挑戰是換能器元件和主體之間的聲阻抗不匹配。聲阻抗不匹配需要匹配層(類似于電阻抗匹配RF電路)以有效地傳輸能量。這通常包括在手柄中的換能器元件前面的幾個匹配層,接著是透鏡,然后是耦合凝膠。凝膠與身體建立了良好的聲學接觸 - 因為空氣是一種非常好的聲學反射器。
接收電路的另一個重要問題是快速過載恢復。盡管T / R開關應該保護接收器免受大脈沖的影響,但這些脈沖中的一小部分泄漏到開關上足以使前端電路過載。較差的過載恢復會使接收器“失明”直至其恢復,直接影響皮膚表面的接近程度。
如何生成超聲圖像-B模式
圖2顯示了如何生成不同的掃描圖像。在所有四次掃描中,具有由矩形限定的掃描線的圖片是圖像的實際表示,如將在顯示監視器上看到的。這里示出了單個換能器的機械運動(在箭頭所示的方向上)以便于理解圖像生成;但是沒有機械運動的線性陣列可以產生相同類型的圖像。在線性掃描的例子中,換能器元件在水平方向上移動;對于每條掃描線(圖像中顯示的線),發送Tx脈沖并記錄來自不同深度的反射信號并進行掃描轉換以顯示在視頻顯示器上。在圖像采集期間如何移動單個換能器確定圖像的形狀。這直接轉換為線性陣列換能器的形狀,即,對于線性掃描,陣列將是直的,而對于弧掃描,陣列將是凹的。
步驟從機械單換能器系統到電子系統所需要的也可以通過檢查圖2中的線性掃描來輕松解釋。如果單個換能器元件被分成許多小塊,那么如果一次激勵一個元件并且記錄來自身體的反射,一個也獲得如圖所示的矩形圖像,現在只需要移動換能器元件。由此可以看出,弧掃描可以由具有凹形的線性陣列構成;扇形掃描將由具有凸形的線性陣列組成。
盡管上面的例子解釋了B模式超聲圖像生成的基礎知識,但在現代系統中,一次使用多個元素來生成掃描線,因為它允許改變系統的孔徑。改變光圈就像改變光學中焦點的位置一樣 - 它有助于創建更清晰的圖像。圖3顯示了如何對線性陣列和相控陣進行此操作;主要區別在于,在相控陣中,所有元素同時使用,而在線性陣列中,僅使用總陣列元素的子集。使用較少數量的元件具有節省電子硬件的優點;但它增加了對給定視野進行成像的時間。相控陣是不同的;因為它的餡餅形狀,非常小的換能器可以在遠場中成像大面積。這就是為什么相控陣換能器是心臟成像等應用中的首選換能器,其中必須處理肋骨之間的小空間,通過這些空間需要對更大的心臟進行成像。
陣列中的激勵沿掃描線引導,由一組旨在同時到達焦點的脈沖的延遲分布確定。脈沖(圖3)由陣列上方垂直時間線上的“波浪形”(陰影顏色)表示 - 隨著時間從陣列表面垂直增加。圖3中的線性階梯式陣列將向一組元件(孔徑)提供成形激勵,然后通過添加前導元件并使尾部元件掉落來使孔徑步進。在每個步驟中,通過脈沖的同時到達形成一條掃描線(光束)。在相控陣中,所有傳感器同時處于活動狀態。在所示的示例中,黑暗線是掃描線,用于對由代表性脈沖圖形產生的反射數據進行成像。
模擬與數字波束成形
模擬波束成形(ABF)和數字在波束成形(DBF)超聲系統中,為每個信道存儲從特定焦點沿波束反射的接收脈沖,然后在時間上對齊,并且相干求和 - 這提供空間處理增益,因為信道的噪聲是不相關的。圖像可以形成一系列模擬電平,用模擬延遲線延遲,求和,并在求和(ABF)后轉換成數字 - 或者通過采樣盡可能接近換能器元件的模擬電平進行數字處理,將它們存儲在存儲器(FIFO),然后以數字方式對它們求和(DBF)。
圖4和5顯示了ABF和DBF系統的基本相應框圖。兩種類型的系統都需要完美的通道到通道匹配。請注意,兩種實現都需要可變增益放大器(VGA),并且將繼續處于數字情況,直到具有足夠大動態范圍的ADC以合理的成本和足夠低的功率提供。請注意,ABF成像系統只需要一個非常高分辨率和高速的ADC,但DBF系統需要許多高速,高分辨率的ADC。有時在ABF系統中使用對數放大器來壓縮ADC之前的動態范圍。
動態范圍
在前端電路中, LNA的本底噪聲決定了接收信號的微弱程度。但同時 - 特別是在CW多普勒信號處理期間 - LNA還必須能夠處理非常大的信號。因此,最大化LNA的動態范圍至關重要(通常,由于噪聲限制,不可能在LNA之前實現任何濾波)。注意,這些相同的條件適用于任何接收器通信應用,最靠近天線的電路也不具有大量濾波的優點;因此,它需要應對最大的動態范圍。
CW多普勒在超聲系統中具有所有信號的最大動態范圍 - 在CW期間,正弦波連續傳輸一半的換能器陣列,而另一半正在接收。 Tx信號很有可能泄漏到Rx側;并且還有來自靠近表面的靜止身體部位的強烈反射。這往往會干擾檢查身體深處靜脈中的血流,伴隨著非常微弱的多普勒信號。
在目前的技術水平下,CW多普勒信號不能通過數字波束形成(DBF)系統中的主成像(B模式)和PW多普勒(F模式)路徑來處理;因此,圖1中的CW多普勒處理表示模擬波束形成器(ABF).ABF具有更大的動態范圍。當然,DBF超聲中的“圣杯”是通過DBF鏈處理的所有模式(實際成本),并且有很多關于如何到達那里的研究。
功率
由于超聲波系統需要多個通道,所有前端組件的功耗 - 從T / R開關,通過LNA,VGA和ADC,到波束形成器的數字電路 - 非常關鍵規范。如上所述,總是需要增加前端動態范圍,以便最終將所有超聲模式集成到一個波束形成器中 - 這種趨勢將導致增加系統中的功率。然而,相應地需要使超聲系統永遠更小 - 具有降低功率的趨勢。數字電路中的功率通常隨電源電壓而降低;但對于模擬和混合信號電路來說,這不一定是正確的。此外,考慮到降低的模擬“凈空”傾向于降低動態范圍這一事實,電源電壓可以達到的極低程度將會受到限制,并且仍能達到所需的動態范圍。
結論
我們試圖通過首先解釋這種系統的基本操作,然后指出需要哪些特定的性能參數來確保最佳系統操作來向這里展示超聲前端IC所需的權衡。本文的更完整版本 1 可用于提供其他詳細信息。
-
超聲波
+關注
關注
63文章
2990瀏覽量
138245 -
復用器
+關注
關注
1文章
706瀏覽量
28291 -
超聲圖像
+關注
關注
0文章
4瀏覽量
7388
發布評論請先 登錄
相關推薦
B型超聲儀工作原理與故障診斷
AMEYA360設計方案丨便攜式超聲儀解決方案
超聲系統的設計考慮對前端元件選用的影響
新型集成數字解調器和JESD204B接口的超聲模擬前端
用于超聲波的 8 通道模擬前端的模擬器件-AFE5805
前端組件選擇在超聲系統是重要的考慮因素
提供多種復雜的扇出模式的組件部署模式
新型激光超聲成像生成的人體組織圖像
超聲系統考慮因素如何影響前端組件選擇
如何使用超低噪聲電源提高超聲系統的圖像質量






 工商網監
工商網監
評論