 慣性傳感器有哪些誤差源
慣性傳感器有哪些誤差源
大多數慣性傳感器都有幾個誤差源。有些很容易處理,有些則不那么容易。以下是一些:
空偏置誤差(或加速度計時的零g偏置誤差)
空偏置誤差只是慣性傳感器偏離零時的誤差正在經歷無刺激 - 加速度計為零g或陀螺儀無旋轉。通常,所有傳感器都表現出至少兩種形式的零偏差誤差:初始零偏差誤差和由于溫度引起的零偏差誤差。初始偏置誤差很容易糾正 - 只需在沒有刺激的情況下測量傳感器的輸出,并從理想情況下減去它。存儲該值并將其添加到所有后續測量中。由于溫度導致的零偏置誤差更難以處理,因為校正系數通常隨傳感器而變化,并且每個單元必須單獨進行溫度補償。數據表應提供空偏差誤差的規范。
比例因子誤差
比例因子誤差是傳感器靈敏度與理想值的偏差。可能存在初始溫度和過溫溫度組分。正如零偏差誤差一樣,兩者都可以通過校準來校正。比例因子校準更加困難,因為它要求用戶將已知的刺激應用于傳感器。 ADI公司的慣性傳感器通常具有很小的初始比例因子誤差,甚至由于溫度引起的比例因子誤差更小。
噪音
所有慣性傳感器都有噪音。通常,噪聲與帶寬成比例,因此用戶必須根據它們將使用的帶寬來計算噪聲的重要性。所有ADI公司慣性傳感器的噪聲本質上都是高斯噪聲(噪聲能量在所有頻率都相同),因此它非常簡單。使用單極輸出濾波器時,傳感器的RMS噪聲為:RMS NOISE =噪聲密度*√(帶寬*π/ 2)。噪聲密度應在傳感器的數據表中指定。還有一些其他誤差源不太重要,如非線性,比率等。這超出了本FAQ的范圍。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
慣性傳感器
+關注
關注
2文章
167瀏覽量
27914 -
誤差源
+關注
關注
0文章
9瀏覽量
8116
發布評論請先 登錄
相關推薦
ADIS慣性傳感器選型問題
請問各位,我需要在工程車輛操縱穩定性和平順性測試時檢測車身姿態,ADIS16334、ADIS16364和ADIS16445這三款慣性傳感器除了外形尺寸和供電電壓不同,各有什么優勢?推薦哪種?另外
發表于 10-24 09:20
高性能慣性傳感器助力運動物聯網
,始終都有磁場讀數。慣性具有獨有的自恃性。顯然,慣性MEMS傳感器有自身的不足(漂移),但這些不足都在可控范圍以內,采用小尺寸經濟型封裝的新型工業慣
發表于 10-24 10:33
各傳感器之間的全部對齊誤差如何消除
正在將MEMS慣性測量單元(IMU)用于個人交通工具平臺的自平衡制導系統,是否會有一款面向消費者,能消除各傳感器之間的全部對齊誤差,并且所有核心傳感器元件都集成在單個芯片上的IMU?否
發表于 07-19 06:06
MEMS慣性傳感器的測試及應用領域
MEMS(Micro-Electro-Mechanical System)是指集機械元素、微型傳感器以及信號處理和控制電路、接口電路、通信和電源于一體的完整微型機電系統。MEMS慣性傳感器可構成
發表于 05-18 06:28
慣性傳感器
的物理平臺平臺式慣導:(下圖a所示)慣性傳感器安裝在一組框架上(平衡環),通過扭矩電機根據陀螺儀感應的旋轉來實現平臺的旋轉,使得平臺始終與導航系保持一致。因
發表于 09-01 08:06
淺談MEMS慣性傳感器
麥姆斯咨詢:高精度慣性傳感器主要用于測量傾角、加速度和振動等。慣性傳感器作為MEMS器件,以單晶硅傳感器元件為基礎,采用最新的微機械加工技術

慣性傳感器的原理_慣性傳感器構成
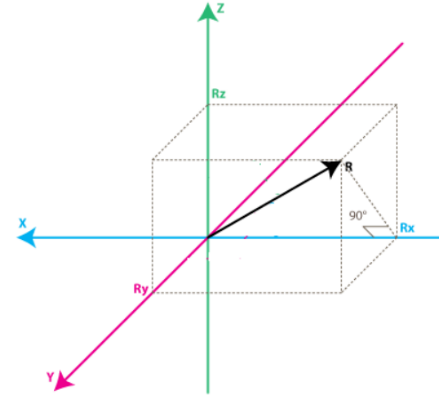
慣性傳感器是一種傳感器,主要是檢測和測量加速度、傾斜、沖擊、振動、旋轉和多自由度(DoF)運動,是解決導航、定向和運動載體控制的重要部件。
發表于 09-12 14:41
?1w次閱讀
什么是慣性傳感器它是如何工作的
慣性傳感器包括加速度計(也叫加速度傳感器)和角速度傳感器(也叫陀螺儀),以及它們的單、雙、三軸組合慣性測量單元(也稱IMU)和AHRS。這里
發表于 03-27 11:55
?1.5w次閱讀
慣性傳感器肩負怎樣的責任
慣性傳感器包括加速度計(也叫加速度傳感器)和角速度傳感器(也叫陀螺儀),以及它們的單、雙、三軸組合慣性測量單元(也稱IMU)和AHRS。
發表于 03-30 15:51
?766次閱讀
壓力傳感器的誤差分析
在選擇壓力傳感器的時候我們要考慮他的綜合精度,而壓力傳感器的精度受哪些方面的影響呢?其實造成傳感器誤差的因素有很多,下面我們主要說四個無法避免的誤差







 工商網監
工商網監
評論