") 下一代智能汽車開發(fā)毫米波雷達(dá)系統(tǒng)和天線陣列技術(shù)背后的挑戰(zhàn)性技術(shù)
下一代智能汽車開發(fā)毫米波雷達(dá)系統(tǒng)和天線陣列技術(shù)背后的挑戰(zhàn)性技術(shù)
現(xiàn)代汽車隨著其發(fā)展包含了越來越復(fù)雜的電子設(shè)備,汽車制造商正將高級駕駛輔助系統(tǒng)(ADAS)配置在其新開發(fā)的型號上,通過增加汽車的安全性以獲得更高的安全率。
大多數(shù)交通事故的發(fā)生是由于駕駛?cè)藛T的錯(cuò)誤,ADAS通過提出各種各樣的問題,包括碰撞避讓、胎壓過低,來警醒和輔助駕駛?cè)藛T,被證明可減小傷亡。
ADAS使用的雷達(dá)技術(shù)主要聚焦在頻率76-81GHz。這些雷達(dá)需要面對各種各樣的應(yīng)用、工作條件和目標(biāo)檢測的挑戰(zhàn),以提供特定駕駛?cè)藛T輔助功能所需要的可靠覆蓋范圍(距離)和視場(角度)。
本文給出了為下一代智能汽車開發(fā)毫米波雷達(dá)系統(tǒng)和天線陣列技術(shù)背后的挑戰(zhàn)性技術(shù),用實(shí)例闡述了如何在ADAS應(yīng)用中成功使用NI AWR設(shè)計(jì)環(huán)境平臺,特別是Visual System Simulator? (VSS)系統(tǒng)設(shè)計(jì)軟件內(nèi)的雷達(dá)設(shè)計(jì)功能。
ADAS技術(shù)
目前,制造商基于視覺傳感器技術(shù)和工作于24GHz與/或77GHz的雷達(dá)系統(tǒng)來實(shí)現(xiàn)這些系統(tǒng)。視覺系統(tǒng)檢測道路標(biāo)識,處理其他的可視化道路信息,但是容易受到降水特別是霧與雪導(dǎo)致的性能下降的影響,也容易受距離的影響。
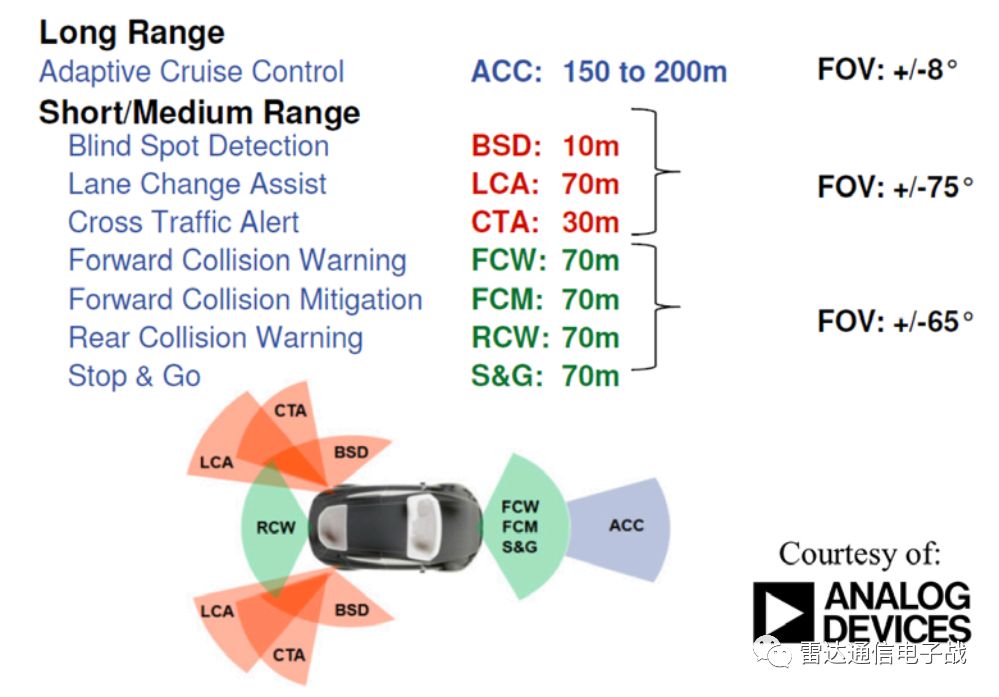
另一方面,遠(yuǎn)距離雷達(dá)(LRR)支持多種功能,能輕松處理30到200 米的距離,近距離雷達(dá)(SRR)能檢測低于30米的距離。目前混合結(jié)構(gòu)中廣泛使用的用于SRR檢測的24GHz頻段,到2022年在新的汽車上要逐漸淘汰。同時(shí),支持LRR的77GHz頻段(76-81GHz)預(yù)期將為未來的汽車同時(shí)提供近距離和遠(yuǎn)距離檢測。圖1給出了近/中和遠(yuǎn)距離雷達(dá)的詳細(xì)參數(shù)。
77GHz頻段的技術(shù)優(yōu)點(diǎn)包括:天線較小(只有目前24GHz的三分之一)、允許的發(fā)射功率較高,更重要的是可以得到較寬的帶寬,從而獲得較高的目標(biāo)分辨率。雷達(dá)調(diào)制技術(shù)、天線波束控制、系統(tǒng)結(jié)構(gòu)以及半導(dǎo)體技術(shù)的進(jìn)步,促使人們在未來ADAS汽車中快速選擇毫米波雷達(dá)。
為了應(yīng)用好這些技術(shù),雷達(dá)開發(fā)者需要與射頻有關(guān)的系統(tǒng)設(shè)計(jì)軟件,以支持具有射頻前端元件詳細(xì)分析的雷達(dá)仿真,包括非線性射頻鏈路、高級天線設(shè)計(jì)以及信道建模。在雷達(dá)原型機(jī)進(jìn)行昂貴地建造與測試之前,電路與電磁(EM)分析的協(xié)同仿真提供了真實(shí)系統(tǒng)性能的準(zhǔn)確描述。
NI AWR軟件提供了這些能力,汽車?yán)走_(dá)產(chǎn)品開發(fā)的所有這些軟件都集中在一個(gè)平臺——從最初的框架,到通過天線陣列物理層設(shè)計(jì)的調(diào)制研究,再到基于Ⅲ-Ⅴ或硅集成電路技術(shù)的前端電子仿真。
NI AWR設(shè)計(jì)環(huán)境平臺集成了這些關(guān)鍵的雷達(dá)技術(shù),為輔助要處理與ADAS電子有關(guān)的及其復(fù)雜的物理層和電氣設(shè)計(jì)數(shù)據(jù)的工程設(shè)計(jì)團(tuán)隊(duì)提供必要的自動化。ADAS支持包括:
.雷達(dá)系統(tǒng)的波形設(shè)計(jì)、基帶信號處理和參數(shù)估計(jì),具有雷達(dá)測量的特殊分析,也具有射頻元件和信號處理的綜合行為模型。
.收發(fā)信機(jī)射頻/微波前端的設(shè)計(jì),具有針對印制板(PCB)和單片微波IC(MMIC)/RFIC設(shè)計(jì)的電路級分析和建模(分布傳輸線、有源和無源器件)。
.平面/3D 電磁分析,用于描述天線和天線陣列、無源結(jié)構(gòu)、復(fù)雜互連以及外殼的電氣行為。
.仿真軟件和測試儀表的互聯(lián)。
雷達(dá)結(jié)構(gòu)和調(diào)制類型
對于自適應(yīng)巡航控制(ACC),為了處理高速公路上的多目標(biāo)場景,目標(biāo)測距和速度測量要同時(shí)進(jìn)行,要求既有高分辨率又有準(zhǔn)確性。目前的ACC系統(tǒng)使用相對熟悉的波形,具有較長測量時(shí)間(5-100ms)。與之相比,未來針對安全應(yīng)用的開發(fā),如避免碰撞(CA)或自動駕駛(AD),要求具有更高的可靠性(極低的虛警率)和極快的反應(yīng)時(shí)間。
對汽車?yán)走_(dá)系統(tǒng)的重要要求包括:ACC的最大探測范圍近似為200m,測距精度大約1m,速度分辨率2.5km/h。為滿足這些系統(tǒng)要求,已實(shí)現(xiàn)了各種波形調(diào)制技術(shù)和結(jié)構(gòu),包括連續(xù)波(CW)發(fā)射信號或經(jīng)典的具有超窄脈寬的脈沖波形。
對于固定的高分辨率測距系統(tǒng)而言,與脈沖波形相比CW雷達(dá)系統(tǒng)的主要優(yōu)點(diǎn)是測量時(shí)間相對較低和計(jì)算復(fù)雜。文獻(xiàn)中常見的兩類CW波形包括線性頻率調(diào)制(LFMCW)和移頻鍵控(FSK),移頻鍵控技術(shù)至少使用兩種不同的離散頻率。表1比較了不同雷達(dá)結(jié)構(gòu)及其優(yōu)缺點(diǎn)。
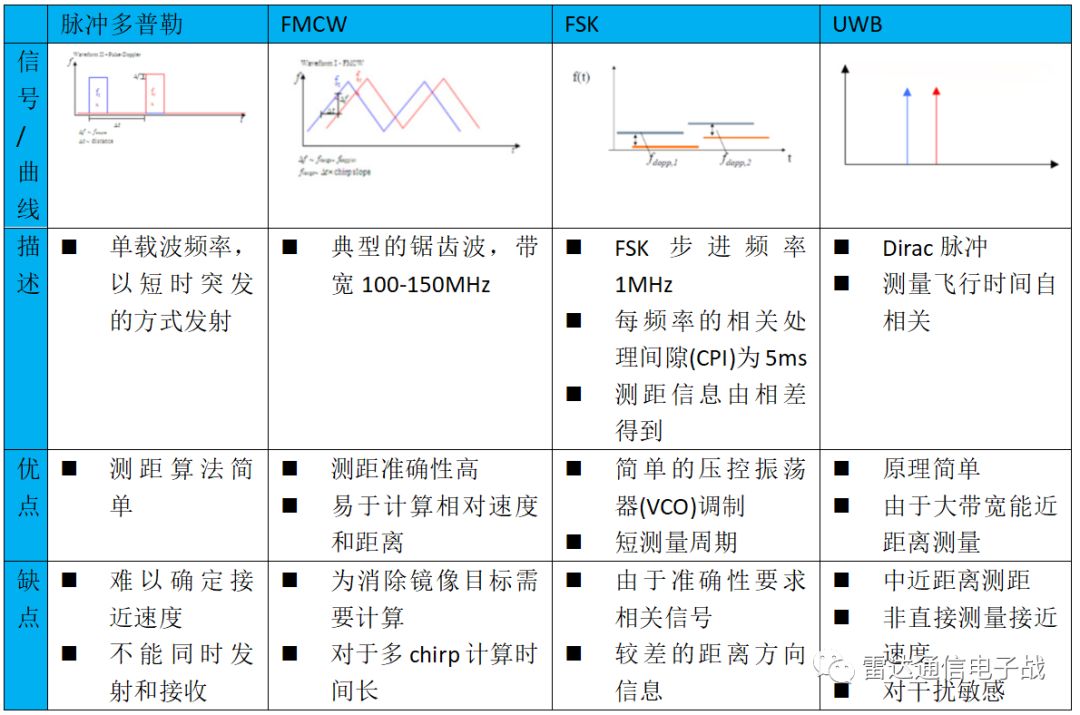
對于ACC應(yīng)用,同時(shí)進(jìn)行測距和相對速度的測量極其重要。LFMCW和FSK可滿足這些要求。LFMCW需要多個(gè)測量周期和數(shù)學(xué)計(jì)算以解決模糊性,而FSK測距精度則差了點(diǎn)。結(jié)果,一種將LFMCW和FSK結(jié)合在一起稱為多頻移鍵控(MFSK)的單波形信號令人們極其感興趣。
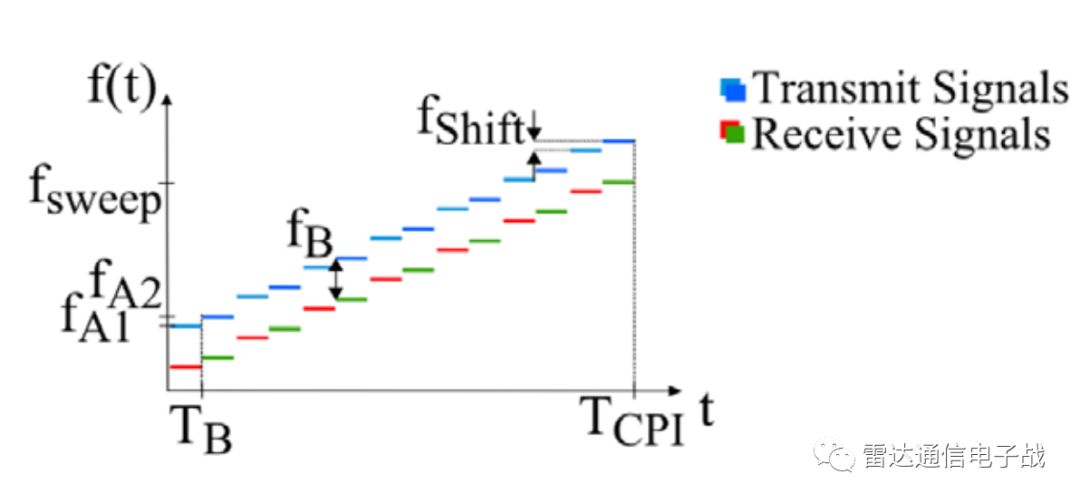
MFSK是專為汽車應(yīng)用雷達(dá)開發(fā)的,包含兩個(gè)或更多具有交替頻移以及一定帶寬和持續(xù)時(shí)間的發(fā)射頻率,如圖2[1]所示。
如前所述,脈沖雷達(dá)也被廣泛應(yīng)用于汽車?yán)走_(dá)系統(tǒng)。相對速度的確定可以用相關(guān)發(fā)射機(jī)和接收機(jī)測量包含多普勒頻移的脈沖之間相位變化來獲取。對于多普勒(PD)雷達(dá),測距仍然依靠信號的傳播時(shí)間。為了同時(shí)進(jìn)行測距和相對速度的測量,脈沖重復(fù)頻率是一個(gè)重要的參數(shù)。
VSS軟件專用于RF系統(tǒng)設(shè)計(jì)和實(shí)現(xiàn)
哪一種結(jié)構(gòu)和波形調(diào)制技術(shù)能達(dá)到開發(fā)和產(chǎn)品成本目標(biāo)之間平衡所必需的性能,在確定時(shí)需要作很多權(quán)衡。VSS軟件可滿足這些需求。VSS軟件專用于RF系統(tǒng)設(shè)計(jì)和實(shí)現(xiàn),提供需要的常用仿真技術(shù)工具箱、無線/信號處理模塊以及對用戶開發(fā)代碼的支持。
VSS軟件是一種射頻、無線通信和雷達(dá)設(shè)計(jì)的解決方案,提供為準(zhǔn)確描述當(dāng)今先進(jìn)的雷達(dá)系統(tǒng)信號產(chǎn)生、發(fā)射、天線、T/R開關(guān)、雜散、噪聲、干擾、接收、信號處理和信道模型設(shè)計(jì)挑戰(zhàn)和分析需求所必須的射頻和數(shù)字信號處理(DSP)部件的仿真和詳細(xì)建模。
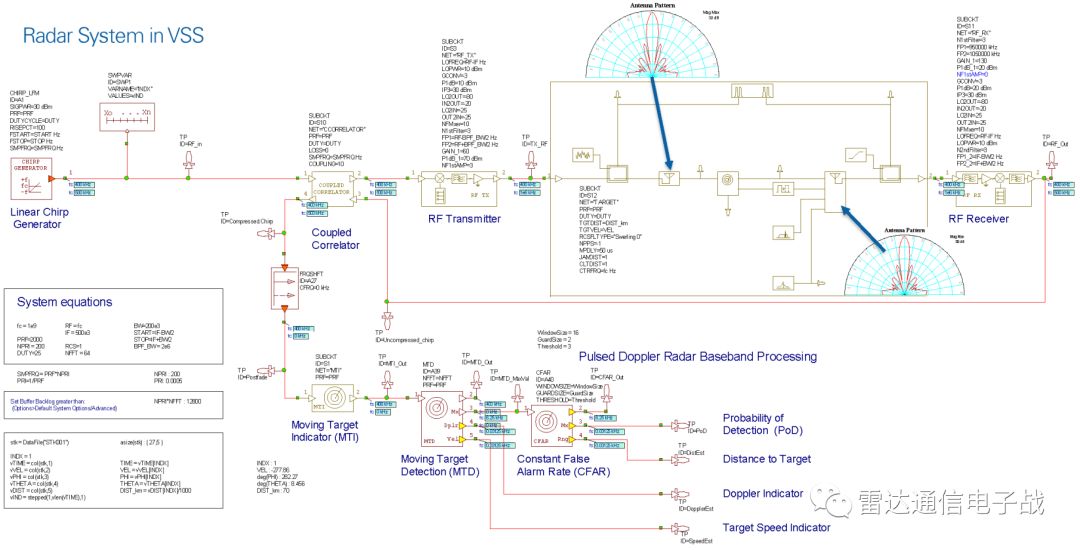
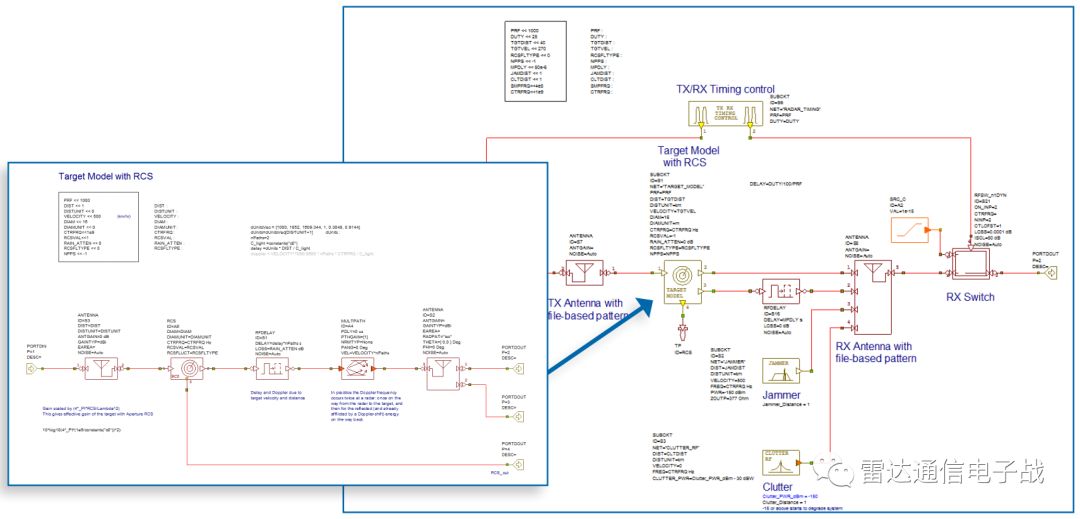
圖3給出了一種可行的ACC雷達(dá)結(jié)構(gòu)、調(diào)制框圖、信道建模和測量配置的VSS工作空間示例。該工作空間包含多普勒(PD)雷達(dá)系統(tǒng)設(shè)計(jì),具有用于仿真的信號產(chǎn)生、射頻發(fā)射、天線、雜散、射頻接收、動目標(biāo)檢測(MTD)、恒虛警(CFAR)處理器、信號檢測等。
Chirp信號的電平為0dbm,PRF=2kHz,占空比25%。目標(biāo)模型根據(jù)多普勒頻率偏移和目標(biāo)距離定義,到達(dá)角(THETA/PHI)根據(jù)數(shù)據(jù)文件規(guī)定,隨著時(shí)間變化,產(chǎn)生多普勒頻率和信道延遲以描述不同速度和距離的目標(biāo)反射信號。可以包含雷達(dá)雜散模型,其功率譜密度形狀也可以改變。在本例中,雜散的幅度分布設(shè)為瑞利型,雜散的功率譜設(shè)為Weilbull概率分布。
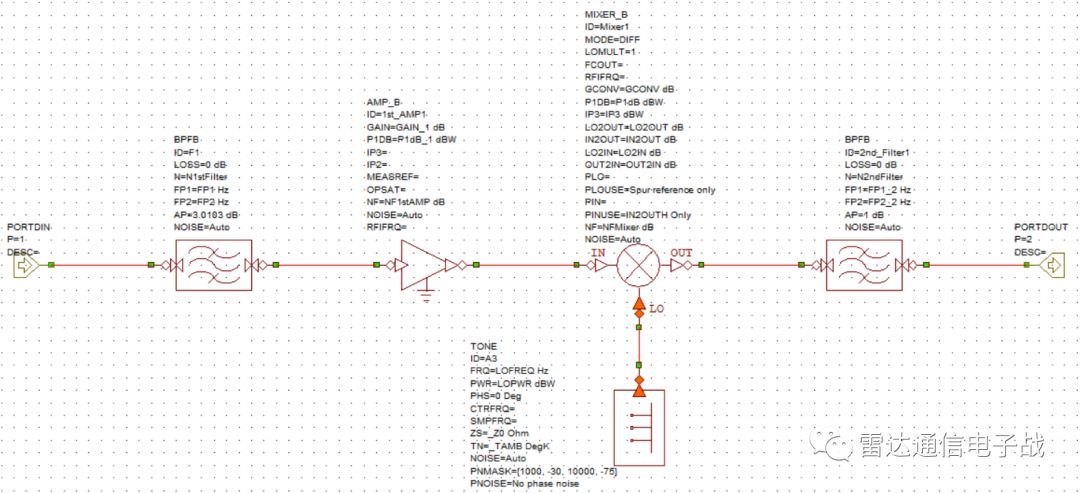
圖4中的射頻發(fā)射機(jī)包括振蕩器、混頻器以及濾波器,其增益、帶寬和載頻基于系統(tǒng)的要求或射頻團(tuán)隊(duì)提供的實(shí)際硬件性能進(jìn)行設(shè)定。同樣,射頻接收機(jī)包括振蕩器、混頻器、放大器和濾波器,其增益、帶寬和載頻基于系統(tǒng)的要求進(jìn)行設(shè)定。
在能得到發(fā)射機(jī)前端設(shè)計(jì)的細(xì)節(jié)時(shí)與Microwave Office電路仿真軟件聯(lián)合仿真是可行。本文后面的小節(jié)將討論通過電路、系統(tǒng)和EM協(xié)同仿真來分析收發(fā)信機(jī)電子元件和波束成形天線陣列之間的互動。
為了更有效檢測運(yùn)動目標(biāo),使用了MTD。MTD基于PD雷達(dá)的高性能信號處理算法。一組多普勒濾波器或FFT算子覆蓋了所有可能期望的多普勒頻移,而且在CFAR處理中使用了MTD的輸出。在本特例中,提供了檢測率的測量和CFAR。
雷達(dá)信號波形必須在時(shí)域在接收機(jī)輸入端進(jìn)行測量。因?yàn)槟繕?biāo)返回信號通常受雜散、干擾或噪聲的影響,在時(shí)域進(jìn)行檢測是不可行的。MTD用來在頻域?qū)崿F(xiàn)多普勒和距離檢測。在MTD模型中,與目標(biāo)測距和多普勒頻率相應(yīng)的數(shù)據(jù)被集中起來。然后,使用CFAR處理器基于檢測和虛警概率設(shè)置判決門限,如圖5所示。
這種相對簡單的設(shè)計(jì)可用作不同PD應(yīng)用的模板。雷達(dá)信號是脈沖重復(fù)頻率(PRF)、功率和脈寬(占空比)的函數(shù)。這些參數(shù)可以根據(jù)不同的情形進(jìn)行改變。在仿真中,雷達(dá)信號可以被任何通過數(shù)據(jù)文件讀入器定義的信號替換。
數(shù)據(jù)文件讀入器可以方便地使用記錄的或定制的數(shù)據(jù)。VSS提供的仿真和建模能力,可優(yōu)化雷達(dá)結(jié)構(gòu),增強(qiáng)信道模型準(zhǔn)確性的(包括多徑衰落和地雜波),推導(dǎo)收發(fā)信機(jī)鏈路預(yù)算參數(shù)和詳細(xì)天線輻射方向圖需求。
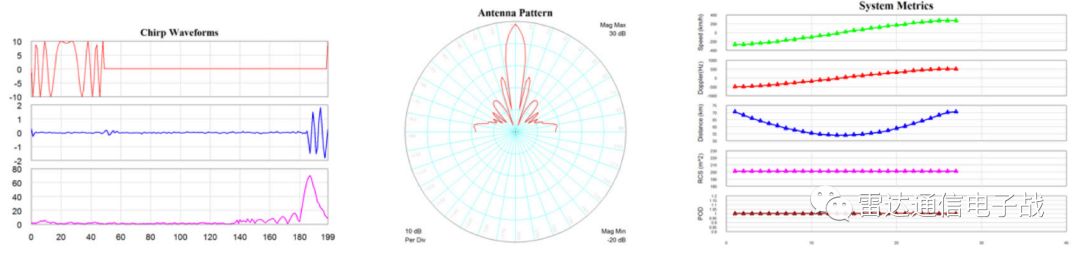
圖6示出了幾種仿真結(jié)果曲線,包括發(fā)射和接收chirp波形、天線方向圖和幾種系統(tǒng)測量,如相對速度和距離。在仿真中,到目標(biāo)的距離掃描反映了接近并經(jīng)過靜止雷達(dá)的汽車導(dǎo)致多普勒頻率從負(fù)值變?yōu)檎?紅色曲線),在目標(biāo)經(jīng)過雷達(dá)時(shí)相對距離為0。在用于ACC的汽車?yán)走_(dá)中,速度和距離信息用于警告駕駛員或采取糾正的動作(例如剎車)
多波束/多范圍
典型ACC啟停系統(tǒng)需要多個(gè)近程和遠(yuǎn)程雷達(dá)傳感器檢測周圍的車輛。較短的測距雷達(dá)一般覆蓋到60m,角度覆蓋達(dá)±45°,允許檢測可能并入當(dāng)前車道的相鄰車道。較遠(yuǎn)的測距雷達(dá)覆蓋到250m,角度±5°到±10°,以檢測同一車道的前方更遠(yuǎn)的車輛。
為支持多范圍測距和角度掃描,模塊制造商如Bosch、DENSO和Delphi開發(fā)并將多范圍、多探測功能集成進(jìn)能力增強(qiáng)、成本敏感的傳感器,使用了多通道發(fā)射機(jī)(TX)/接收機(jī)(RX)結(jié)構(gòu)。這些不同的范圍可以采用多波束/多范圍雷達(dá)利用諸如FMCW、天線陣列設(shè)計(jì)的數(shù)字波束成形等雷達(dá)技術(shù)來實(shí)現(xiàn)。
天線
基于FMCW雷達(dá)驅(qū)動多天線陣列的ACC系統(tǒng)多模型雷達(dá)如下圖所示。這種具有數(shù)字波束成形的多波束、多范圍雷達(dá)同時(shí)工作在24GHz和77GHz,利用兩個(gè)開關(guān)陣列天線實(shí)現(xiàn)長距離測距和窄角度覆蓋(150m,±10°)、短距離測距和寬角度覆蓋(60m,±30°)。
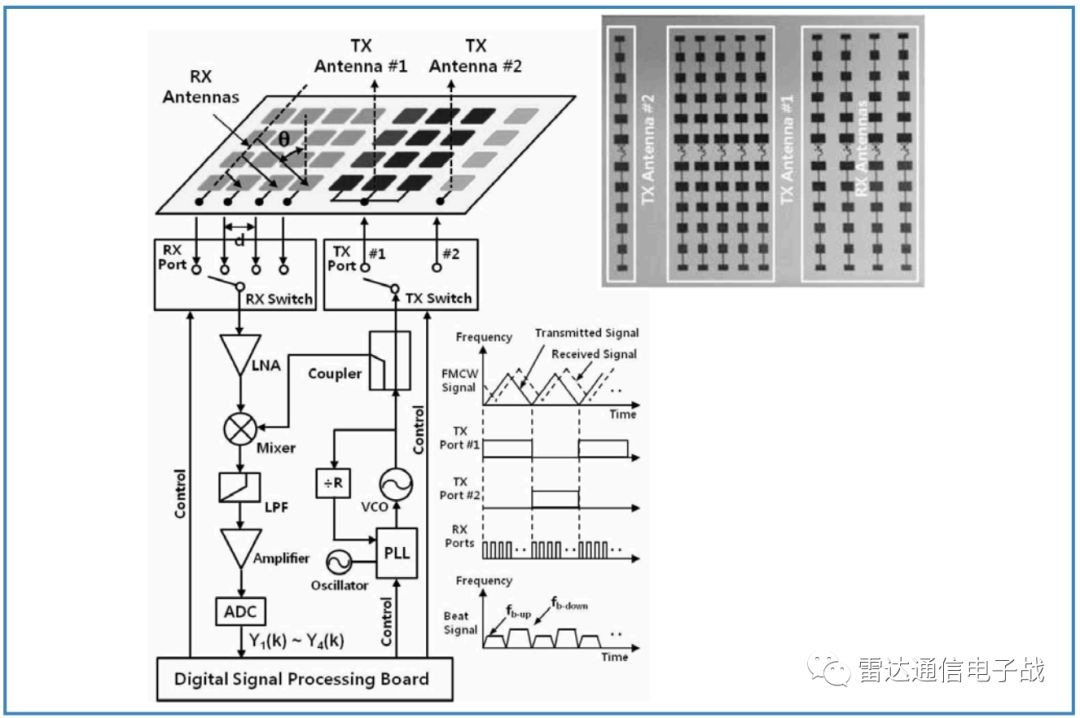
本例說明了多個(gè)天線陣列系統(tǒng)的使用,用于這類系統(tǒng)需要的接收機(jī)中,這些陣列包括長距離窄角度檢測(77GHz)的多個(gè)(5X12單元)串行饋電的貼片陣列(SFPA)和用于短距離、寬角度檢測的單個(gè)SFPA(為24GHz設(shè)計(jì)的1X12單元)和四個(gè)(1X12)SFPA。
雷達(dá)性能受天線技術(shù)的影響極大,必須考慮特定應(yīng)用的增益、波束寬度、范圍和物理尺寸。在本示例雷達(dá)中的多個(gè)固定TR/RX天線陣列對于范圍、角度和副瓣抑制進(jìn)行了優(yōu)化。貼片天線相對易于設(shè)計(jì)與制造,在裝配到陣列中的性能也很好,使總增益和指向性增加。
矩形貼片天線設(shè)計(jì)的性能受天線的長、寬、電介質(zhì)厚度和介電常數(shù)的影響。單個(gè)貼片的長度控制了諧振頻率,而寬度控制了輸入阻抗和輻射方向圖。增加寬度會減小阻抗。然而,將阻抗減小到50歐姆通常需要非常寬的貼片天線,這會占用許多寶貴的空間。
較大的寬度也可增加帶寬,基底的高度較大也可增加帶寬。較低的基底介電常數(shù)數(shù)值控制了邊緣場,導(dǎo)致較寬的邊緣,因此能得到較好的輻射。減小介電常數(shù)也會增加天線的帶寬。較低的介電常數(shù)值也會增加效率。
設(shè)計(jì)單個(gè)貼片天線或陣列,可以使用設(shè)計(jì)軟件利用EM分析準(zhǔn)確仿真和優(yōu)化性能。NIAWR設(shè)計(jì)環(huán)境平臺包括AXIEM 3D平面和AnalystTM3D有限元方法(FEM)EM仿真器。這些仿真器不僅仿真天線的近場、遠(yuǎn)場輻射方向圖、輸入阻抗和表面電流等性能,也能直接與VSS軟件協(xié)同仿真,自動將天線仿真結(jié)果并入到總雷達(dá)系統(tǒng)分析中,不需要在EM仿真器和系統(tǒng)設(shè)計(jì)工具之間手動輸出/輸入數(shù)據(jù)。
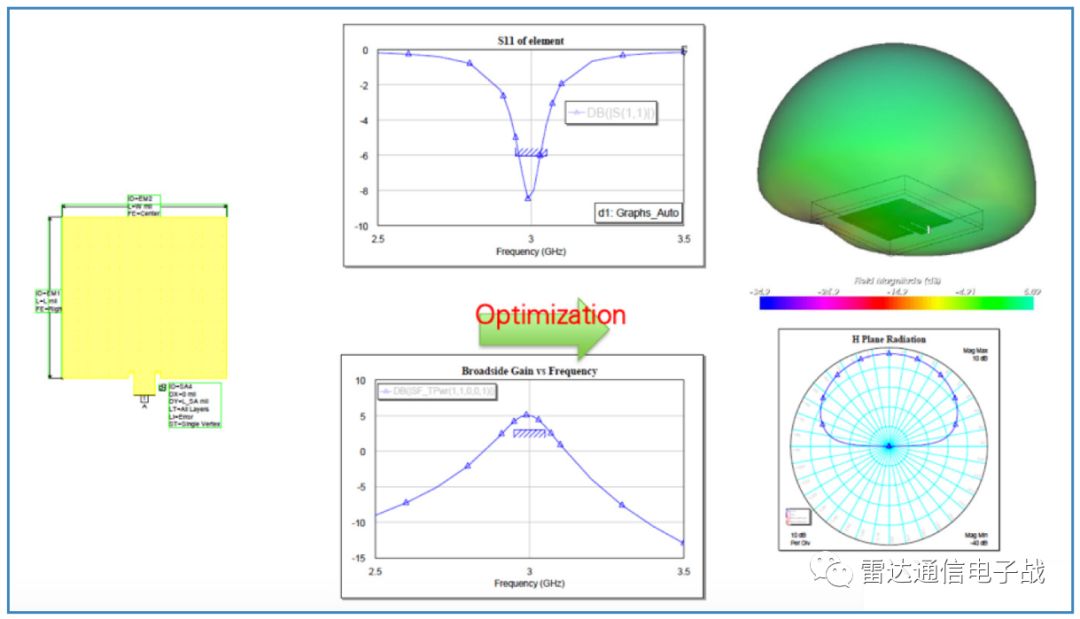
AXIEM和Analyst仿真器都能輸入用戶定義的天線物理屬性如貼片寬度、長度以及電介質(zhì)的屬性如材質(zhì)和基底厚度,生成電氣響應(yīng)。AXIEM仿真器特別適合于貼片天線分析(如上圖),而Analyst仿真器最適合于3D結(jié)構(gòu)如同軸饋線結(jié)構(gòu)或有限介質(zhì)(當(dāng)近似為PCB邊緣時(shí)會影響天線的性能)的建模。下圖給出了結(jié)合有饋線的貼片天線陣列。
為了確定產(chǎn)生所需要電氣響應(yīng)的物理屬性,天線設(shè)計(jì)者可使用AntSynTM天線分析和優(yōu)化模塊。AntSynTM軟件使用戶能規(guī)定天線的電氣要求和物理尺寸約束,軟件探索設(shè)計(jì)配置的集合,基于專用的遺傳優(yōu)化和EM分析確定最優(yōu)結(jié)構(gòu)。
生成的天線幾何尺寸可以被導(dǎo)入專用的平面或3D EM仿真器如AXIEM或Analyst仿真器,用于驗(yàn)證或進(jìn)一步分析/優(yōu)化。
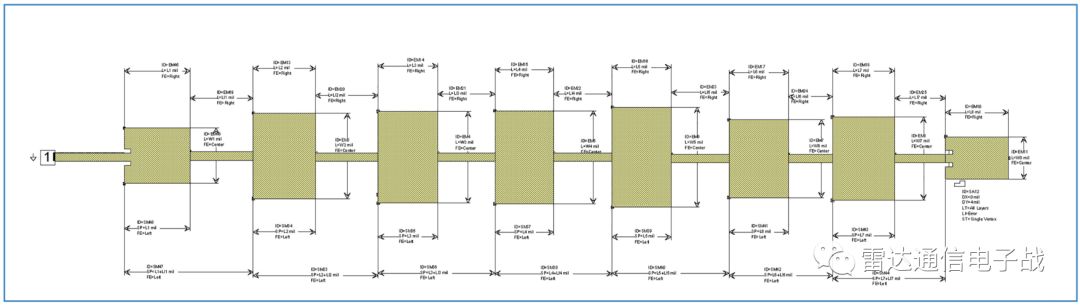
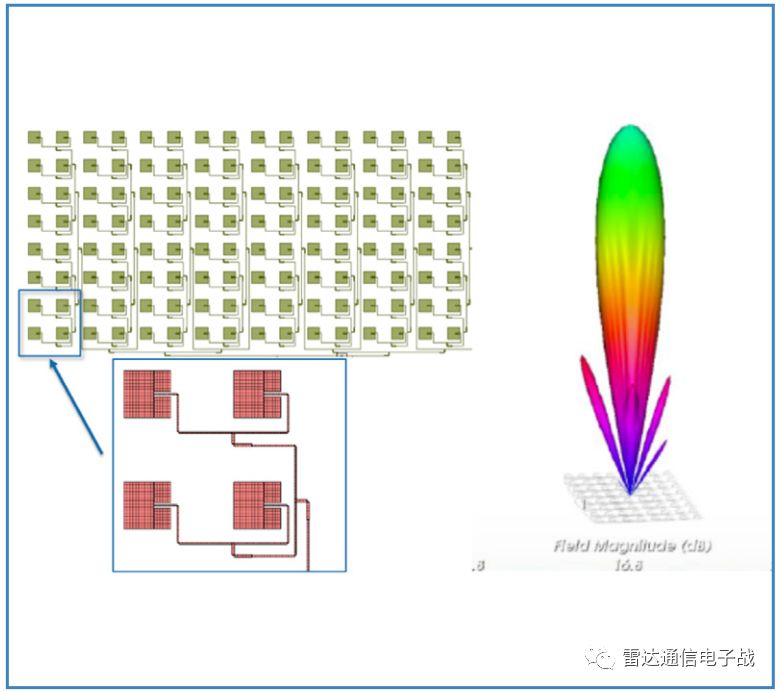
可以將簡單的單元如微帶貼片組合起來很容易地構(gòu)成平面單元陣列結(jié)構(gòu)。貼片可以串聯(lián)配置成上圖所示的1x8貼片陣列,每個(gè)單元通過傳輸線“可調(diào)”部分串聯(lián)連接。在該AXIEM項(xiàng)目中,每個(gè)陣列單元的長度和寬度以及連接的傳輸線可以用變量來定義,允許對總體陣列性能優(yōu)化。
1x8陣列可以進(jìn)一步擴(kuò)展為8x8的高增益固定波束陣列,如下圖所示,為[2]所報(bào)道的8x8陣列的復(fù)制。(7GHz 8x8陣列,具有N*λ/2饋電,λ/2<間距<λ)
在VSS軟件內(nèi),陣列可以用專用相控陣模型表述為系統(tǒng)行為模塊,使設(shè)計(jì)者能規(guī)定陣列結(jié)構(gòu)(單元數(shù)、單元間距、天線方向圖、受損的單元、增益漸變等等),用于所需要性能如增益和副瓣等陣列需求的高級別理解。對于天線陣列團(tuán)隊(duì)來說,對于大規(guī)模陣列(上千個(gè)單元)和開發(fā)基本需求的系統(tǒng)設(shè)計(jì)者,這種方法是最佳的。
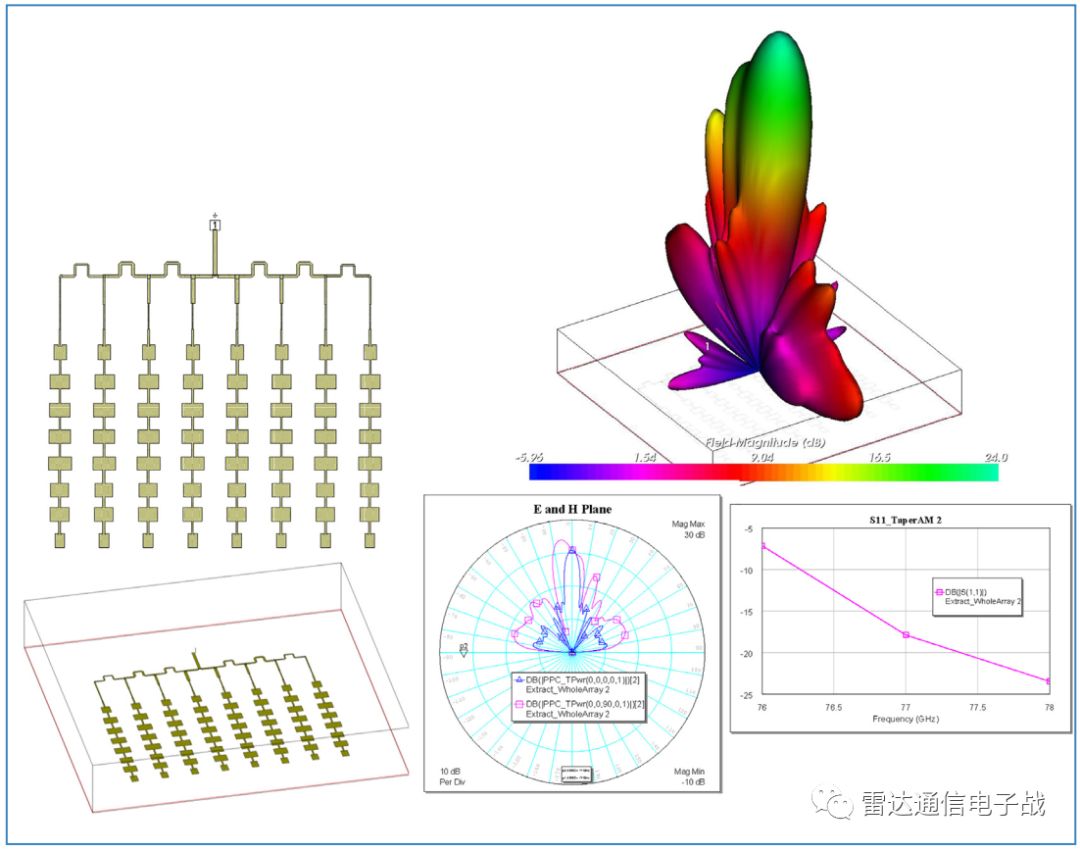
也可以用AXIEM或Analyst仿真器進(jìn)行詳細(xì)的物理層陣列建模。在AXIEM或Analyst仿真器中,可以指定獨(dú)立的饋電端口,如果是饋電網(wǎng)絡(luò),也可以指定單饋電網(wǎng)絡(luò)(圖:8x8貼片陣列的仿真,近似為2.3x2.5cm)
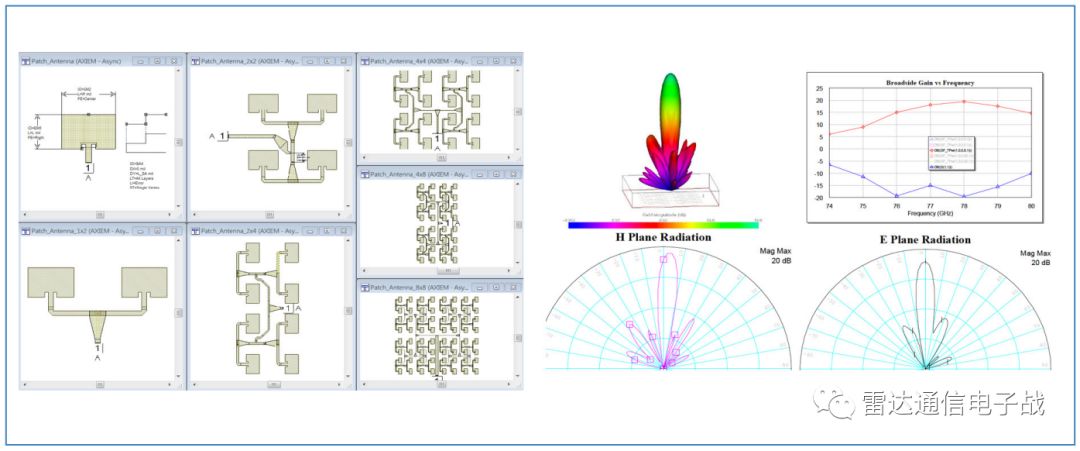
這一方法使設(shè)計(jì)團(tuán)隊(duì)能研究波束角度和每個(gè)獨(dú)立單元的輸入阻抗之間的相互關(guān)系,允許射頻前端元件設(shè)計(jì)者考慮對收發(fā)信機(jī)性能的阻抗負(fù)載效應(yīng)影響。這一能力突顯了具有射頻電路、系統(tǒng)和EM協(xié)同仿真的重要性,以在制造這些復(fù)雜系統(tǒng)之前準(zhǔn)確研究電路/天線行為。
MIMO和波束控制天線技術(shù)
對于汽車,雷達(dá)會接收到不想要的來自地面以及環(huán)境中任何較大靜止物體的后向雜散,如建筑物和護(hù)欄的側(cè)面。除了直接路徑反射,散射體之間還存在著多徑反射。通過使用多輸入多輸出(MIMO)天線可減輕雜散的影響。
MIMO雷達(dá)系統(tǒng)使用多天線系統(tǒng),每個(gè)發(fā)射天線獨(dú)立于其他發(fā)射天線輻射任意波形。每個(gè)接收天線都可以接收這些信號。由于不同的波形,回波信號可以重新分配給單個(gè)發(fā)射機(jī)。
N個(gè)發(fā)射機(jī)天線的場和K接收機(jī)的場數(shù)學(xué)上合成為一個(gè)虛擬的K*N單元的場,形成一個(gè)較大的虛擬孔徑,使設(shè)計(jì)者可減少必要的的陣列單元數(shù)目。因此,MIMO雷達(dá)系統(tǒng)提高了空間分辨率,極大提高了對干擾的抑制。通過提高信噪比,目標(biāo)檢測概率也增加了。
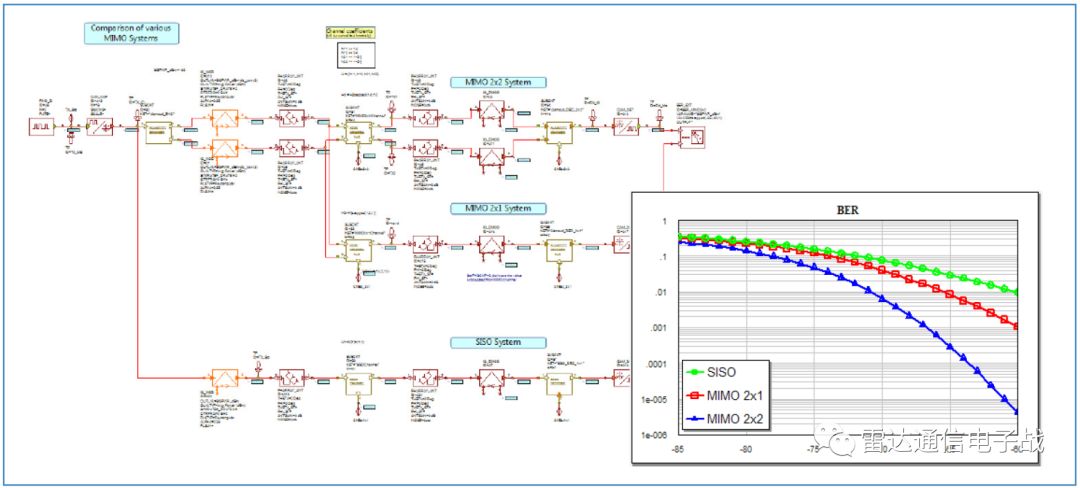
VSS軟件能實(shí)現(xiàn)用戶規(guī)定的MIMO算法,評估與具體信道模型相關(guān)聯(lián)的總體性能。這種信道模型可以仿真高度定制的多徑衰落信道,包括信道路徑損耗、收發(fā)信機(jī)之間的相對速度、最大多普勒擴(kuò)散。支持獨(dú)立的或連續(xù)的塊與塊之間的操作,信道可以包含多種路徑(LOS、瑞利、萊斯、頻移),可以根據(jù)其衰落的類型、延遲、相對增益和其他應(yīng)用特征獨(dú)立地配置。
該模塊也可以仿真用戶定義幾何尺寸的接收機(jī)天線,使其能仿真單輸入多輸出(SIMO)系統(tǒng),如上圖所示。
總結(jié)
本應(yīng)用示例討論了ADAS設(shè)計(jì)面臨的挑戰(zhàn),通過例子闡述了VSS軟件的雷達(dá)設(shè)計(jì)能力如何幫助設(shè)計(jì)者克服這些障礙。在車輛中ADAS越來越普及,不斷地研究與開發(fā)使其更復(fù)雜、可靠性更高。類似NI AWR設(shè)計(jì)環(huán)境平臺這種仿真技術(shù)的進(jìn)步,特別是對射頻敏感的電路設(shè)計(jì)、陣列建模和系統(tǒng)級協(xié)同仿真,使天線設(shè)計(jì)者和系統(tǒng)集成者可優(yōu)化這些系統(tǒng),以達(dá)到挑戰(zhàn)性的尺寸、成本和可靠性目標(biāo)。
-
adas
+關(guān)注
關(guān)注
309文章
2168瀏覽量
208524 -
智能汽車
+關(guān)注
關(guān)注
30文章
2777瀏覽量
107146 -
毫米波雷達(dá)
+關(guān)注
關(guān)注
106文章
1030瀏覽量
64240
原文標(biāo)題:下一代智能汽車的毫米波雷達(dá)系統(tǒng)實(shí)例
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論