 長城汽車自動駕駛開發的安全DNA
長城汽車自動駕駛開發的安全DNA
無論是特斯拉的事故還是Uber的事故,都離不開自動駕駛的安全。
自動駕駛應該定義或者擴張為一個廣義的、顛覆整個汽車行業,或者是顛覆所有行業的駕駛技術,因為物流、農業、工業、礦區等行業都可以用自動駕駛解決。解決的前提是什么呢?要有足夠的安全。要有足夠安全性,保障系統是可靠的,系統決策是正確的,起碼要保證系統不會出致命的事故,所以任何自動駕駛系統都離不開安全。
2019第四屆ADAS與自動駕駛論壇于3月21-22日在上海召開,論壇由CCIA智能網聯專委會與佐思產研主辦,地平線、縱目科技、中科慧眼、中電昆辰、富蘭光學、創景科技等單位支持。
長城哈弗技術中心主任工程師甄龍豹在論壇上發表了題為“長城汽車自動駕駛開發的安全DNA”的演講,以下是演講全文。
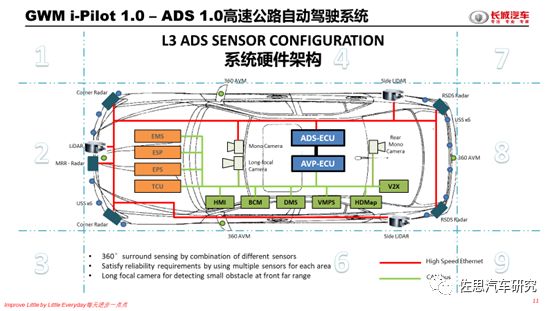
首先看一下自動駕駛汽車是由什么組成的?廣義上的自動駕駛汽車分兩部分,第一部分是自動駕駛系統ADS,第二部分是傳統的車輛平臺(AutonomousVehicle Platform,簡稱AVP)。車輛平臺由傳統執行機構ESP、EPS,交互系統HMI等組成。
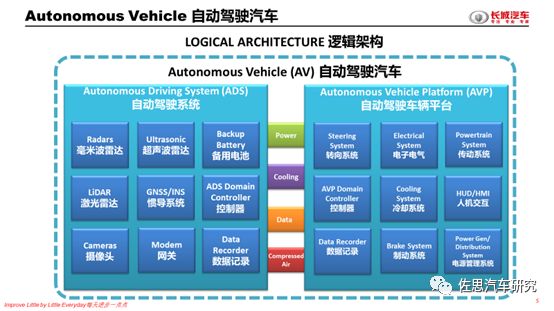
自動駕駛系統包含雷達、超聲波、環視、定位、控制器、數據記錄等。
其他還包括冗余架構、冷卻系統、冗余電源、電源管理系統等。這兩個系統之間通過以太網或者其他車載網絡進行數據交換。
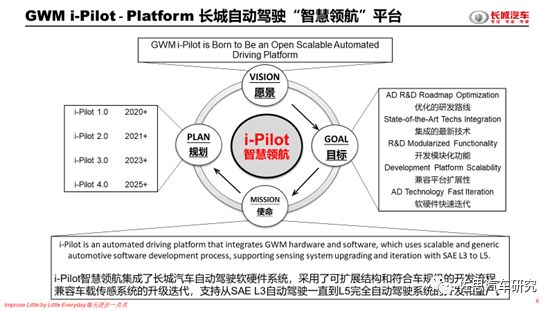
為了更好應對ADS和AVP的開發,長城推出了智能領航平臺i-Pilot。i-Pilot是從L3開始的。i-Pilot愿景是開放、可擴展的自動駕駛平臺,目標是優化研發路線,集成業內最新技術,開發模塊化功能,兼容平臺拓展性,實現軟硬件的快速迭代。
I-Pilot智慧領航集成了長城汽車自動駕駛系統,采用了可擴展結構,符合車規級開發流程,兼容車載傳感器系統的升級迭代,支持從L3自動駕駛一直到L5完全自動駕駛系統的開發和量產。

上圖是長城汽車的自動駕駛開發路線圖,目標是2021年實現高速公路的自動駕駛,里面包含上下匝道自動處理。判斷高速公路自動駕駛智能化程度,最簡單的區分是是否支持上下匝道自動處理。如果它不支持,那它是不完整的。
I-Pilot 2.0現在更多是作為研發性項目,實現城市自動駕駛,服務于共享出行,無人送貨等。
I-Pilot 3.0將1.0和2.0進行整合,形成服務于城市和高速公路自動駕駛的I-Pilot3.0。
I-Pilot 4.0是利用更新的傳感器,更新一代的技術架構,更新一代完整技術,升級迭代打造4.0。當然現在只是一個概念,因為屆時有什么最新的技術,有什么最新的傳感器,誰也無法確定。
現在已經量產的車輛平臺里面,換擋、制動、扭矩等各個方面都采用了線控。2.0會實現完整的車輛備份控制,包括所有的備份。3.0、4.0實現新架構、新迭代的優化,成本更低,更好為社會服務的平臺。
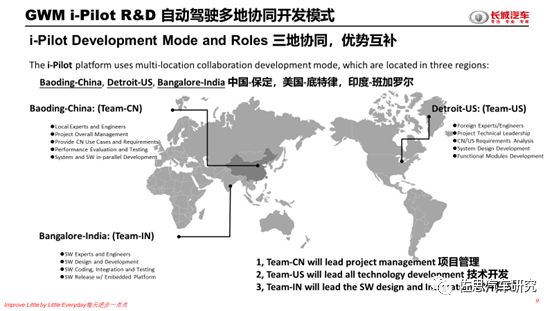
長城汽車現在采取中、美、印三地協同研發。很多人不理解,開發自動駕駛系統,為什么要搞這么多研發機構?舉一個最簡單的例子,長城的i-Pilot是首先立足服務于中國,最后服務于全球。著眼點不單單是中國。在中國上市以后,會逐步推到德國、美國,如果不了解當地情況,自動駕駛系統會滿足當地的交規和駕駛習慣嗎?
美國高速具有中國高速所不具備的其他特征,如不同的紅綠燈,高速上有十字路口等。特斯拉致死事故就是在高速的十字路口導致的,這在中國高速里面是完全想象不到的。
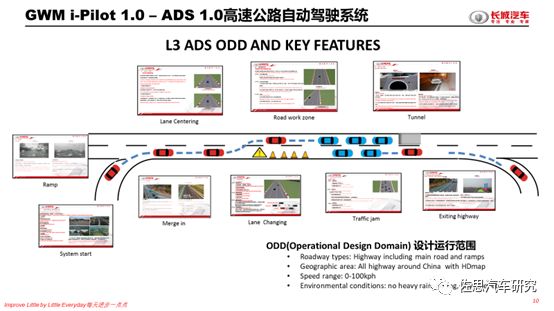
高速公路的自動駕駛系統有一系列的情況。拿換道來說,是由于前車車速太慢,駕駛員要去快車道行駛,不想在慢車道上走,還是由于其他駕駛員的主觀意圖介入?這是換道意圖的產生;然后進行換道可能性的判斷,有沒有別的車在搶相鄰車道?后車是不是不會突然加速?等等。換道就會有不下一百個工況的研究,因此不管仿真也好,還是實際上路測試也好,還是測試設備上測試也好,都要不斷發掘,打造系統可靠性和完整性。
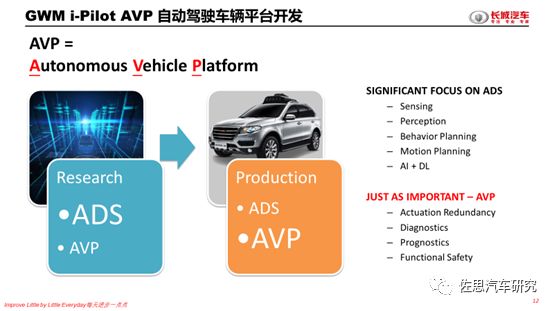
長城的AVP是車輛本身的執行平臺。因為我們發現業內企業將過多精力集中在自動駕駛技術本身,技術再好,技術落地也需要車輛平臺的支撐,否則技術再好也是沒法落地的。所以AVP同樣重要。

2018年8月27日長城VV6發布會上,長城汽車正式加入了百度的Apollo開放車輛認證平臺。
10月24日,長城與AtonomousStuff宣布為中國市場共同開發和部署自動駕駛車輛平臺。新推出的ORA電動車R1,也完全支持線控處理,目前長城已經形成燃油與純電雙引擎自動駕駛車輛開發平臺,以更好的支持業內自動駕駛系統開發及落地。
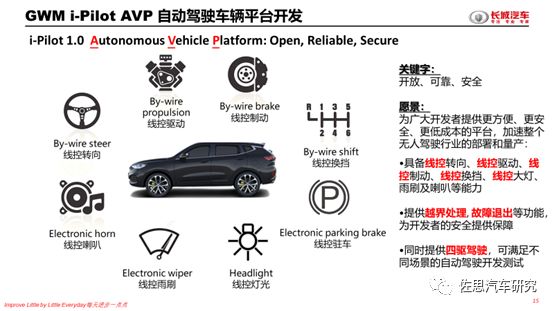
長城自動駕駛車輛開發平臺具備線控驅動、線控制動、線控換檔、線控大燈、線控雨刷等功能,為廣大開發者提供方便、安全、更低成本的平臺,加速整個無人駕駛行業的部署和量產。同時VV6提供四驅駕駛,可滿足不同場景的自動駕駛開發測試。
下圖描述了ISO26262和SOTIF的應用。

功能安全方面,有自動駕駛系統安全分析的方法論。整體來說,從用戶需求導出圖譜,整體形成邏輯架構定義,從邏輯架構定義本身進行分析,最后執行系統安全架構。
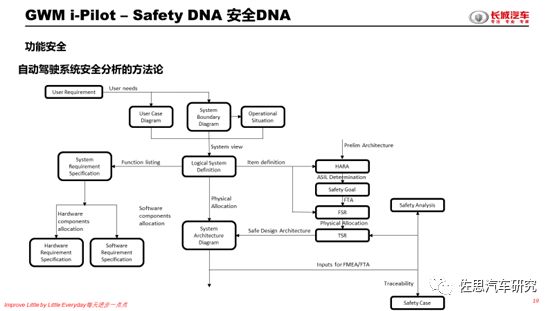
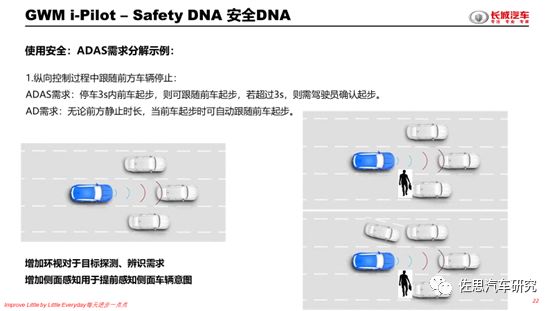
使用安全方面從三大維度考慮,第一是傳統的ADAS需求是什么,第二擬人化的需求是什么,第三本身系統限制是什么。由這三點導出系統配置和系統架構。
比如ADAS需求, ACC停車以后,一般都是三秒內前車起步的話,系統可以自動起步,三秒以后需要駕駛員確認起步。經過調查發現,停車三秒之內,一是人對于周圍環境的記憶和感知是不會產生太大變化的,二是人的注意力會保持集中,這是三秒的來源。過了三秒以后,周圍的環境會產生很大變化,很多信息會從人的記憶里面抹去;同時過了三秒以后,人的注意力會產生分散,有很多其他的額外動作產生。
另外一個是擬人化的分析需求準則。人類的可視距離是非常遠的,在條件空曠、周圍環境清晰的條件下,人的可視距離可達到一公里以上。所以人有更多時間來應對道路維修和路面上的掉落物,可以及早進行規避。這個決策動作完全是人自身決定的。現在任何的傳感器,都不具備遠距離微小物體的探測能力,比如路面的凸起。這會導致什么情況?當發現路面有掉落物的時候,如果在五六十米才感知它的話,自動駕駛系統已經不足以把車安全剎停了。哪怕剎停了,也不敢保證后車不追尾。
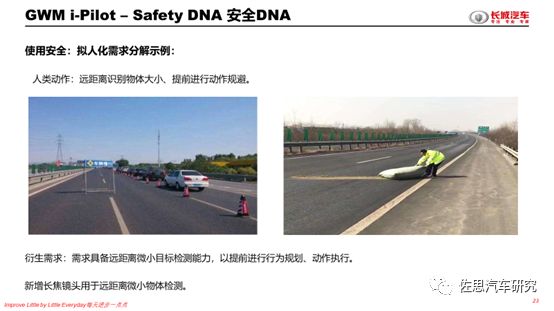
基于這個角度,長城開發了長焦攝像頭,探測距離150米以外,可看到150米左右路面凸起的微小物體,只要高度大于20厘米左右(大于這個尺寸會對系統造成安全影響),可以感知出來,甚至可對它進行完整的區域劃分。凸起物屬于哪一個區域,是壓過去還是騎著過去,針對不同區域劃分,進行不同的系統操作。
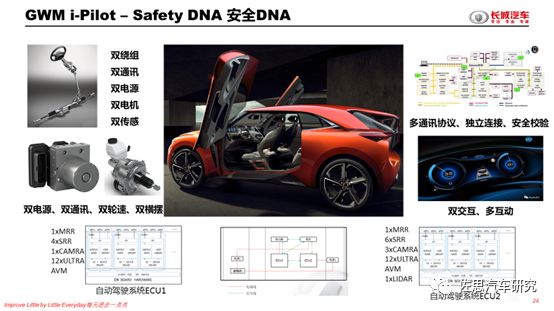
長城車輛平臺的安全系統ECU都有兩份,包括傳感器接入兩個不同的ECU,由不同的ECU處理不同數據,兩個ECU之間進行數據通訊,兩個ECU之間進行不同連接,傳感器進行不同的電源連接,以此保證當其中一套傳感器失效以后,有另一套傳感器可以繼續使用。保證車輛能在緊急情況下將人安全送到另一個區域。整個執行平臺,都是雙份的,包括雙電源、雙電機、雙輪速、雙橫擺等。
從人機交互層面,采用了HUD多維信息感知,使得交互系統的一套失效以后,還有另外一套可以清晰告訴駕駛員系統信息。針對單點失效和多點失效都進行完整的系統操作,包括安全駕駛員監管、當前車輛停車、應急車道停車以及下個服務區停車,以保證駕駛人員的安全。
一些研究表明,自動駕駛汽車在沒有任何死亡事故情況下,安全行駛2.75億英里,才能證明它和人類可以融合。這個準則可以應用于國內的道路嗎?2.75億英里的道路組成應該是什么樣的呢?高速占多少,市區占多少?還是全部是高速或全部是城郊?
Waymo實車測試超過1000萬英里,仿真測試超過50億英里。仿真和實車測試是必須同時進行的。
用仿真來驗證決策是不是安全沒有問題,可是用仿真驗證感知的安全,并不是好方法。因為傳感器的仿真到現在為止,沒有任何的仿真平臺能夠做到對傳感器真值的仿真相關性達到100%,或者99.99%。
-
自動駕駛
+關注
關注
783文章
13684瀏覽量
166150 -
長城汽車
+關注
關注
0文章
238瀏覽量
8044
原文標題:長城汽車自動駕駛開發的安全DNA
文章出處:【微信號:zuosiqiche,微信公眾號:佐思汽車研究】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
長城汽車山海炮通過澳洲ANCAP五星安全認證

德賽西威AR-HUD前沿產品亮相長城汽車總部
FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
吉利與Foretellix合作開發自動駕駛汽車
禾賽科技與長城汽車達成戰略合作,共同推進智能駕駛技術發展
禾賽科技與長城汽車深化合作,共同推進激光雷達項目研發落地
禾賽科技與長城汽車共同推動多款ADAS激光雷達項目研發落地
長城汽車與意法半導體舉辦汽車電子交流日活動
?理想、長城、極氪、小米宣布!合作英偉達!





 工商網監
工商網監
評論