 智能車輛國內外發展現狀及趨勢概述
智能車輛國內外發展現狀及趨勢概述
摘要:本報告將自動駕駛領域最為關鍵的傳感器——激光雷達作為中心,通過調研其所扮演重要角色的領域——自動駕駛,以及自動駕駛和激光雷達的國內外發展現狀,深入了解激光雷達的技術背景。以目前智能車生產廠家所采用的傳感層技術為切入點,通過了解、掌握這些技術的特點、基本原理、適用場景、優缺點,來進一步深入激光雷達,了解其分類、基本工作原理、主要技術指標,對用于智能車的車載激光雷達的主要廠家、產品進行調研,獲得主流產品的主要性能指標參數、測試數據等。
第 1 章 緒論
1.1研究背景與意義
早期激光雷達主要用于軍事和民用地理測繪(GIS)等領域,比如地質測繪、監測樹木生長、測量建筑項目進度等。隨著自動駕駛的興起,對于環境感知要求日趨嚴格,在自動駕駛架構中,傳感層被比作為汽車的“眼睛”,包括車載攝像頭等視覺系傳感器和車載毫米波雷達、車載激光雷達和車載超聲波雷達等雷達系傳感器,其中激光雷達已經被廣泛認為是實現自動駕駛的必要傳感器。相比于其它類型的自動駕駛傳感器,如攝像頭,激光雷達探測的距離更遠,精度更高。相對于攝像頭而言,激光雷達由于為主動發射光束,故比較不容易受周圍環境如弱光、雨雪煙塵的影響,而且攝像頭在進行圖像識別處理時需要消耗大量的處理器能力,而激光雷達產生的三維地圖信息更容易被計算機解析。相比毫米波雷達,激光雷達的分辨率更高,并且毫米波雷達也不適用于行人檢測和目標識別等工作。在自動駕駛領域,激光雷達與其它傳感器互為補充,可以有效提高車輛對于周圍環境感知的準確度。
本文以目前智能車生產廠家所采用的傳感層技術為切入點,通過了解、掌握這些技術的特點、基本原理、適用場景、優缺點,來進一步深入研究其中對于自動駕駛最為關鍵的傳感器——激光雷達,了解其分類、基本工作原理、主要性能指標,對用于智能車的車載激光雷達的主要廠家、產品進行調研,獲得主流產品的主要性能指標參數、測試數據等。對車載激光雷達進行仿真,不僅能節省大量的燃料和經費,而且不受天氣和場地的限制,因此具有巨大的經濟效益。在仿真軟件中,可以靈活地設置各種參數、模擬條件,同時也不存在安全隱患,因此具有巨大的社會效益。由于目前國內外對于車載激光雷達仿真系統的研究較少,本文拋磚引玉,嘗試歸納、分析上述內容,最終得出車載激光雷達仿真系統的主要技術要求。
1.2自動駕駛概述
SAE(國際汽車工程師協會)J3016文件提出的五級自動駕駛分級方案是當前被普遍采用接受的標準,將自動駕駛技術分為L0 ~ L5共六個等級。L0代表沒有自動駕駛加入的傳統人類駕駛,L1 ~ L5則將自動駕駛的發展程度進行了分級:
表1-1 SAE自動駕駛定義和分級標準
(注:參照[1]中表格修改整理)

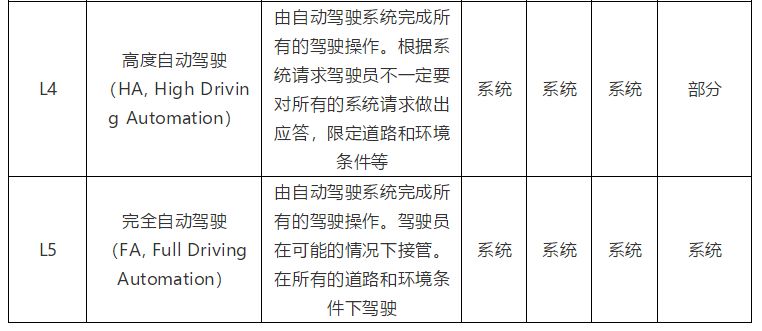
無人駕駛專指L4、L5階段,即駕駛員不介入的情況下汽車可以完成全自動駕駛的控制動作,指向自動駕駛汽車技術發展的最終形態。
自動駕駛覆蓋L1到L5整個階段,在L1、L2階段,汽車的自動駕駛系統只作為駕駛員的輔助,但能夠持續地承擔汽車橫向或縱向某一方面的自主控制完成感知、認知、決策、控制、執行這一完整過程,其他如預警提示、短暫干預的駕駛技術(ADAS, Advanced Driver Assistance Systems)不能完成這一完整的流程,不在自動駕駛技術范圍之內。即汽車至少在某些具有關鍵安全性的控制功能方面(如轉向、油門或制動)無需駕駛員直接操作即可自動完成控制動作。自動駕駛汽車一般使用機載傳感器、GPS和其他通信技術設備獲得信息,針對安全狀況進行決策規劃,在某種程度上恰當地實施控制。自動駕駛包括無人駕駛。
智能駕駛指搭載先進的智能系統和多種傳感器設備(包括攝像頭、雷達、導航設備等),具備復雜的環境感知、智能決策、協同控制和執行等功能,可實現安全、舒適、節能、高效行駛,并最終可替代人來操作。智能駕駛包括自動駕駛以及無人駕駛。
以上三者的關系可由下圖表示:
圖1-1無人駕駛、自動駕駛、智能駕駛關系圖
1.3智能車輛國內外發展現狀及趨勢概述
自1886年汽車誕生以來,結構逐步成型;1913年,汽車開始采用流水先生產;1932年,高速公路誕生;20世紀50年代,被動安全系統,如安全帶、安全氣囊出現;至此,以底盤、傳動、輪胎、車身、機械為核心技術的汽車逐漸開始規模化生產,同時,國內汽車工業開始起步。1970年,Ford最早裝配防抱死制動系統(ABS, Anti-lock BrakingSystem)這一主動安全系統;1995年,Mercedes-Benz率先配備電子穩定系統(ESP,Electronic Stability Program);至此,以發動機、早期汽車電子技術、安全系統和節能為核心技術的汽車性能不斷優化,大量資金和技術被引入,同時,國內汽車工業全面發展。2009年,Google開啟自動駕駛項目,以汽車電子技術、自動駕駛、新能源為核心技術的汽車逐步向智能化、輕量化、電動化、網聯化、出行方式共享化等方向發展;自動駕駛作為重要的發展趨勢之一,將再次徹底改變出行方式。我國汽車工業起步較晚,但在新能源汽車等領域進展較快,并率先趕上自動駕駛研發熱潮,有望在汽車產業發揮引領作用。
美國在20世紀80年代初已經開始自動駕駛技術的軍事化應用,歐洲從80年代中期開始研發自動駕駛車輛,更多強調單車自動化、智能化的研究,日本的自動駕駛研發略晚于歐美,更多關注于采用智能安全系統降低事故發生率,以及采用車間通信方式輔助駕駛。在初期,自動駕駛研發在歐美日已呈現『產學研』相結合的特點,開發測試了不同程度自動化、智能化的車輛,進入21世紀,美國國防高等研究計劃署(DARPA, Defense Advanced Research Projects Agency)舉辦的挑戰賽進一步提高了自動駕駛的社會關注度,激發了相關從業者的研發熱情。由于深度學習算法的引入,自動駕駛技術有了爆炸性的突破。2009年,Google布局自動駕駛,引發了新一輪的產業熱潮,更多的科技企業加入市場爭奪中。2020年前后,成為主要汽車廠商和科技企業承諾推出完全自動駕駛車輛的時間節點。
自上世紀90年代起,國內各高校和研究機構已經陸續開展自動駕駛的研發工作,推出多個測試車型,其中國防科技大學于1992年研制出第一款自動駕駛汽車CITAVT-Ⅰ型。2009年以來,國家自然科學基金委員會舉辦『中國智能車未來挑戰賽』,吸引多個高校和研究機構參與,為自動駕駛技術的交流和發展起到了良好的促進作用,在此期間,一汽、北汽等傳統車企也逐步布局。自國務院在2015年發布《中國制造2025》起,以自動駕駛技術為重點的智能網聯汽車成為未來汽車發展的重要戰略方向,大批初創企業投身自動駕駛領域;2016年,中國工信部裝備工業司汽車處處長表示,正和警方合作起草自動化駕駛道路測試標準化的規定;北汽、上汽、長安等車企相繼公布自動駕駛戰略規劃,國內自動駕駛集中爆發,多個車企公布自動駕駛的戰略規劃;2017年,《汽車產業中長期發展規劃》發布;籌建智能網聯汽車分技術委員會,制定產業技術標準;百度公布Apollo計劃,還有更多的初創企業脫穎而出,獲得巨額投資,可以說,自動駕駛產業已經進入新技術最為火爆的中場階段。
1.4車載激光雷達國內外發展現狀及趨勢概述
目前,全球最大的車載激光雷達公司——Velodyne LiDAR的前身是硅谷科技公司Velodyne,它在Google布局無人駕駛汽車之前就開始在車載激光雷達產業發力,之后與Google合作,成為了車載激光雷達產業的龍頭。其包含了專注于音頻設備的Velodyne Acoustics公司和專注于海洋問題解決方案的Velodyne Marine公司,同樣地,Velodyne在2016年將Velodyne LiDAR作為一家獨立的公司剝離出來,這時正處于世界范圍內車載激光雷達相關技術飛速發展時期。其旗下的HDL-64E型機械激光雷達被廣泛采用于自動駕駛車輛的測試中,不過其高昂的價格和低生產率也提醒各個科技巨頭車載激光雷達的低成本化和量產化相當關鍵,這也正是Tesla一直不采用這種『3D激光雷達』方案,而是堅持采用『毫米波雷達+攝像頭』方案的原因。目前Velodyne LiDAR已經推出成本更低、線數更多的128線的VLS-128型固態激光雷達,這意味著這款激光雷達有更高的分辨率、安全性以及更低的成本,并且可以實現量產。然而,『3D激光雷達+高精度導航地圖+云計算』被認為是未來理想的綜合性解決方案,也就是說,從發展趨勢看,就汽車智能駕駛領域,『毫米波雷達+攝像頭』方案終將隨著車載激光雷達的成本下降而被逐漸取代。
不過,在Velodyne推出VLS-128之前,整體車載激光雷達市場上的趨勢都是往低線束化、固態化發展,也就是往減少激光雷達線束發展,同時也從機械型轉為固態型,比如Quanergy公司就在2016年CES展會上推出了與Delphi公司共同研發的新產品S3,號稱全球首款固態激光雷達,就連Velodyne公司本身也在推出混合或固態的低線束激光雷達。因為這樣做可以降低成本,但是需要用數量來彌補線數的不足,也體現出未來的技術路線未定,產業龍頭Velodyne LiDAR也不能確定到底是多線束激光雷達還是多激光雷達耦合。Velodyne LiDAR認為對于一輛在復雜環境中高速行駛的自動駕駛汽車來說,HDL-64的性能還不夠保證安全,更高線程的激光雷達不僅可以配合一些必要的設備保證安全,還可以讓自動駕駛汽車將不再需要任何其它探測障礙的傳感器。但是Velodyne LiDAR的競爭對手Luminar公司也在做低線束固態激光雷達,其認為由于激光擴散的原因,距離越遠,精準度越低。所以,絕大多數的自動駕駛公司在使用最先進的激光雷達的情況下,還是會選擇添加其他種類的傳感器。各大車載激光雷達公司之間的爭論也是行業的技術現狀之一,至于車載激光雷達技術之后如何發展,還需要看各科技公司的研發情況以及實際測試的結果。
從以上對國外車載激光雷達技術現狀的分析中能夠得到的統一趨勢有低成本化、固態化、量產化,但是Velodyne LiDAR推出更高線束的激光雷達和其他科技廠商推出低線束激光雷達的行為并不矛盾,他們的整體方向依然是要實現激光雷達的更高分辨率和精準度,進一步保證無人駕駛的安全性,只不過前者傾向于使用更強大的設備,后者傾向于使用多激光雷達耦合并降低成本。同時,低線束激光雷達對高線束激光雷達可以起到補充的作用。
實際上國內車載激光雷達的發展不比國外起步晚,北科天繪于2005年成立于北京,和Velodyne的激光雷達計劃幾乎同時開始,然而目前來看,國外的車載激光雷達水平較高。盡管自動駕駛市場需求量極大,激光雷達仍面臨著成本高、量產難的問題。制造門檻高,且應用領域較窄(汽車、資源勘測),使該類產品供應商相對較少,缺乏針對車規級的成熟量產方案。要推動激光雷達解決方案落地,供應商勢必要完整掌握硬件的核心技術,以便控制成本,并以配套的算法推動市場接受其方案。目前,實現激光雷達低成本的路線有:犧牲一定的精度,使用全固態、低線束激光雷達降低制作成本;提高生產率,通過量產帶來的規模效益攤薄產品成本。速騰聚創、禾賽科技等公司均提供自動駕駛的『硬件+算法』一體化解決方案,希望以低線束、低成本、量產化的激光雷達產品打通市場;用于機器人、無人機的激光雷達產商北醒光子、思嵐科技也在向自動駕駛布局。盡管部分廠商已有成品,并與其它初創公司達成合作,但能否打通主機廠和Tier1(一級供應商)尚存疑。相較而言,在2016年,全球頂尖廠商Velodyne LiDAR在中國的銷售額已達到1500萬美元。
1.5本章小結
本章將自動駕駛領域最為關鍵的傳感器——激光雷達作為切入點,通過調研其所扮演重要角色的領域——自動駕駛,以及自動駕駛和激光雷達的國內外發展現狀,從行業和科研等多方面了解激光雷達的技術背景。
第 2 章 智能車輛的傳感層技術分析
2.1 傳感器介紹
在自動駕駛技術來臨之前,車用傳感器即用于汽車電子技術、作為車載電腦(ECU)的輸入裝置,能夠將發動機、底盤、車身各個部分的運作工況信息以信號方式傳輸給車載電腦,從而使汽車運行達到最佳狀態。ADAS(高級輔助駕駛系統)的廣泛應用,使攝像頭等用于環境感知的傳感器進入公眾視野,作為輔助,這些傳感器將汽車周邊的環境信息輸入到相應的系統模塊中,進行判斷,提前給駕駛員預警或提供緊急防護,但不同系統的傳感器間關系孤立,數據單獨處理,信息尚未形成融合。在自動駕駛汽車中,定位、雷達、視覺等傳感器協作融合,能夠以圖像、點云等形式輸入收集到的環境數據,并通過算法的提取、處理和融合,進一步形成完整的汽車周邊駕駛態勢圖,為駕駛行為決策提供依據。
除了激光雷達之外,本文再對攝像頭、毫米波雷達、超聲波傳感器、定位傳感器這部分重要傳感器作簡要介紹:
攝像頭:
用攝像頭代替人眼對目標(車輛、行人、交通標志)進行識別、跟蹤和測量,感知到汽車周邊的障礙物以及可駕駛區域,理解道路標志的語義,從而對當下的駕駛場景進行完整描述。攝像頭必須先識別再測距,如果無法識別則無法測距。相對于其它傳感器,攝像頭的價格相對低廉,有著識別車道線、車輛等物體的基礎能力,在汽車高級輔助駕駛市場已被規模使用。依據不同的圖像檢測原理,可分為單目攝像頭和雙目攝像頭,根據芯片類型又可分為CCD攝像頭和CMOS攝像頭,等等。其優點在于攝像頭是目前唯一能夠辨別物體的傳感器。
但是攝像頭同時具有三個缺點:缺點一是逆光或光影復雜的地方難以使用;缺點二在于依賴于算法,能否辨別物體完全依賴樣本的訓練,樣本未覆蓋的物體將無法辨別,比如Mobileye在中國道路上應用,識別超載運貨車的成功率不超過80%;缺點三在于攝像頭對于行人的識別具有不穩定性,因為行人不同于車輛,動作、服裝、身體各部分變化要素很多,而且還要與街上的建筑、汽車、樹木等背景圖案區分開來,比如Mobileye在日本、德國、美國、以色列等國市區的測試結果顯示,行人的成功檢測率為93.5%,距離實現完全無人駕駛還有很大差距,再如穿著吉祥物套裝或著裝顏色與背景相似的人或搬運東西的人極有可能無法識別。因此,攝像頭的物體識別功能無可比擬,但由于依賴樣本識別物體,以及識別行人具有不穩定性,攝像頭應用于測距領域無法保障100%的穩定性,在自動駕駛領域脫離激光雷達使用只能應用于ADAS而不能應用于完全的無人駕駛。
從硬件方面看,計算機視覺所需的工業攝像頭在技術層面相對成熟,具有較高的圖像穩定性、高傳輸能力和抗干擾能力,且單個攝像頭成本已降到200元以下,因此單車可以配備6~8個攝像頭覆蓋不同角度,天風證券預測,2020年國內前后裝攝像頭需求量為4184萬個。
毫米波雷達
發射1~10毫米的電磁波,根據反射波的時間差及強度等來測量距離,汽車毫米波雷達的頻段主要在24 GHz和77 GHz。其優點在于性價比較高,探測距離遠,精度較高,穿透霧、灰塵的能力強,能夠全天候全天時工作,在很多高檔轎車里都有應用;缺點是行人的反射波容易被其他物體反射波埋沒,難以分辨,無法識別行人,例如采用毫米波雷達和攝像頭的感知系統實現自動駕駛的Tesla,在行人較多的鬧市區會自動鎖定自動駕駛功能。因此,毫米波雷達在測距領域具有較高性價比,但是其無法探測行人是一個致命弱點,只能應用于自適應巡航系統等ADAS系統。目前毫米波雷達市場由國外廠商壟斷,國內主要的零部件供應商正在致力于車載毫米波雷達的國產化。79 GHz毫米波雷達作為未來發展趨勢,能更有效地發揮自動駕駛傳感器所需的性能。
超聲波傳感器
發射振動頻率高于聲波的機械波,根據反射波測量距離。其優點在于探測物體范圍極廣,能夠探測絕大部分物體,且有較高穩定性;缺點是一般只能探測10米以內的距離,無法進行遠距離探測。因此,超聲波雷達廣泛應用于倒車雷達,在自動駕駛領域常常作為短距離雷達,應用如自動泊車輔助系統。
定位傳感器
可以獲得自身相對于全局的位置信息。其優點在于技術較為成熟,能夠實現在全局視角的定位功能;缺點在于無法獲得周圍障礙物的位置信息。往往需要與前幾個探障類傳感器搭配使用。
2.2 傳感器分類
智能車輛的傳感器可以分為視覺傳感器、定位傳感器、雷達傳感器、聽覺傳感器和姿態傳感器。其中視覺傳感器可以分為單目攝像頭、雙目攝像頭、夜視紅外攝像頭;定位傳感器可以分為慣性導航系統、衛星導航系統(GNSS)、高精度地圖、實時動態(RTK)差分系統;雷達傳感器可以分為激光雷達和毫米波雷達;聽覺傳感器可以分為語音識別、聲音定位入口;姿態傳感器可以分為車載診斷系統(OBD)、CAN總線、慣性測量單元(IMU)、發動機等汽車工況傳感器。主要的傳感器為激光雷達、毫米波雷達、攝像頭、超聲波雷達、GNSS輔助傳感器,其中GNSS輔助傳感器包括慣性導航系統和RTK差分系統。
傳感器分類圖如下:
圖2-1智能車輛傳感器分類圖
需要說明的是,以上提到的智能車傳感器并不一定會同時出現在一輛車上。某種傳感器存在與否,取決于這輛車需要完成什么樣的任務。如果只需要完成高速公路的自動駕駛,比如Tesla在Model S里使用的Autopilot自動輔助駕駛功能是不需要使用激光雷達的;但如果需要完成城區路段的自動駕駛,沒有激光雷達,僅靠視覺傳感器是很困難的。
2.3 傳感器比較
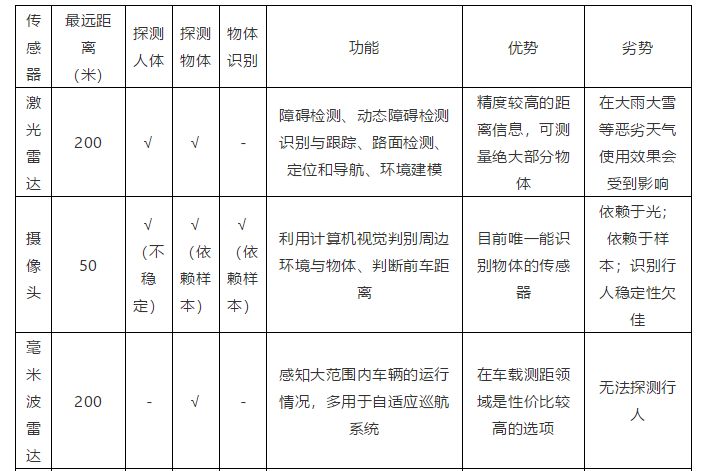
不同傳感器各有優劣。無論是『毫米波雷達+攝像頭』方案還是『3D激光雷達』方案都不具備獨當一面的能力。前者距離實現需要解決的問題是如何達到識別車輛、識別人體100%的成功率以及如何達到識別任何物體并測量距離100%的成功率;而后者距離實現需要解決的問題是大雨和大雪等惡劣條件下的調試以及逐漸擺脫對于高精度地圖的依賴。兩種方案看似競爭,實則互補。技術上的不同方向很有可能形成兩種方案的互相啟發與互相補充。可見,自動駕駛汽車要安全運作,必須保證多傳感器協同工作和信息冗余。因此,多種傳感器往往需要協同工作,優勢互補,共同組成自動駕駛的環境感知解決方案。
表2-1智能車輛主要傳感器比較
2.4本章小結
本章以目前智能車生產廠家所采用的傳感層技術為切入點,通過了解、掌握這些技術的特點、基本原理、適用場景、優缺點并進行比較,進一步說明激光雷達在自動駕駛領域中為何了扮演不可替代的角色。
第 3 章 激光雷達技術分析
3.1 激光雷達分類
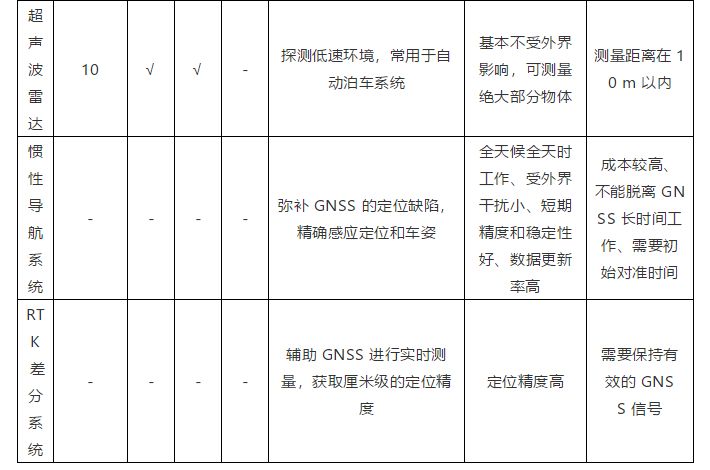
對于激光雷達,可以分別按照探測體系、應用方向、線束、基于機械/電子部件分類如下:
圖3-1激光雷達分類圖
3.2 激光雷達工作原理
LiDAR,是英文Light Detection And Ranging的縮寫,中文名稱為激光雷達。激光雷達作為在激光測距雷達基礎上發展起來的一項主動成像雷達技術,如圖3-2所示,通過發射和接收激光束,分析激光遇到目標對象后的折返時間,計算出到目標對象的相對距離,并利用此過程中收集到的目標對象表面大量密集的點的三維坐標、反射率和紋理等信息,快速得到出被測目標的三維模型以及線、面、體等各種相關數據,建立三維點云(Point Cloud)圖,繪制出環境地圖,以達到環境感知的目的。由于光速非常快,飛行時間可能非常短,因此要求測量設備具備非常高的精度。從效果上來講,激光雷達維度(線束)越多,測量精度越高,安全性就越高。
相比于可見光、紅外線等傳統被動成像技術,激光雷達技術具有如下顯著特點:一方面,它顛覆傳統了二維投影成像模式,可采集目標表面深度信息,得到目標相對完整的空間信息,經數據處理重構目標三維表面,獲得更能反映目標幾何外形的三維圖形,同時還能獲取目標表面反射特性、運動速度等豐富的特征信息,為目標探測、識別、跟蹤等數據處理提供充分的信息支持、降低算法難度;另一方面,主動激光技術的應用,使得其具有測量分辨率高,抗干擾能力強、抗隱身能力強、穿透能力強和全天候工作的特點。
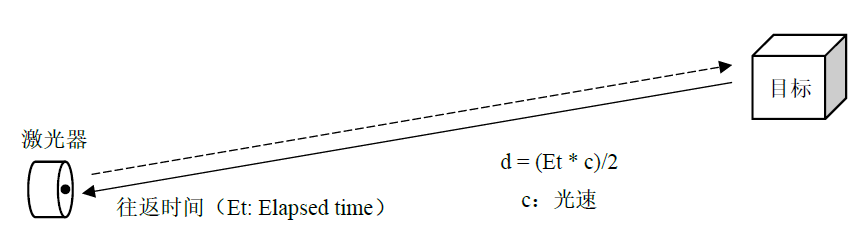
圖3-2激光測距原理
大多數激光雷達系統主要包括四部分:激光器、光學掃描器,光電檢測器,導航系統。本節將簡單說明各部分的原理、功能以及技術指標。
3.2.1激光器
激光和發光二極管都起源于20世紀60年代,激光是受激輻射的光放大而來,兩者都使用二極管產生不同形式的光,當電通過發光二極管時,發出非相干的可見光,光射向所有的方向;激光器使用高度專業化的二極管,其在電磁光譜的光學部分處或附近產生能量。當這種能量對人眼可見時,我們將其稱為“光”,當不可見時,我們將其稱為“輻射”,這與放射性物質的輻射不同。來自激光器的能量通過稱為受激發射的原子過程被放大到極高的強度,最后將能量變成高度定向的波束,意味著所有的單個能量波被對齊,變為“同相”并且沿相同的方向移動。舉個例子的話,發光二極管的能量就像在游樂場的保險杠車;而激光的能量就像賽車,并且它們會同時向同一方向沖出去。發光二極管照明廣泛,而激光精確定位,最適合需要聚焦和精確度的任務。
根據激光輸出功率和波長、脈沖持續時間的不同,國際電工委員會(IEC)將激光分為4類:
Category 4是最高強度的激光,可以造成火災以及對皮膚造成傷害,同時存在漫反射危險,也就是說激光表面的脈沖反射也是危險的。
Category 3同樣對人類有危害,但是在長時間直射眼睛的情況下才是有危害的,一般人眨眼的頻率會保證眼睛在短時間內直射不會受害。但是不會造成火災以及對皮膚造成傷害。
Category 2肉眼可見,但是通常直射眼睛會不舒服,長時間直射也不安全。
Category 1m是第二安全的類型,如果觀察者使用望遠鏡等光學放大裝置直接觀察到直徑為1m的光束就不安全了。
Category 1最安全的激光類型,這個類別包括所有的激光或激光系統,它們的光輻射水平在任何曝光條件下都不會高于眼睛的暴露極限。
3.2.2光學掃描器
激光雷達成像的速度取決于外部反射的光子經光學掃描部件進入系統的速度。市場上存在許多掃描的方法以改變方位角和仰角,如雙振蕩平面鏡、雙軸掃描鏡、多面鏡等。光學掃描器決定了激光雷達的分辨率和檢測范圍(角度)[2]。圖3-3表示HDL-64E的光學掃描部件的結構。
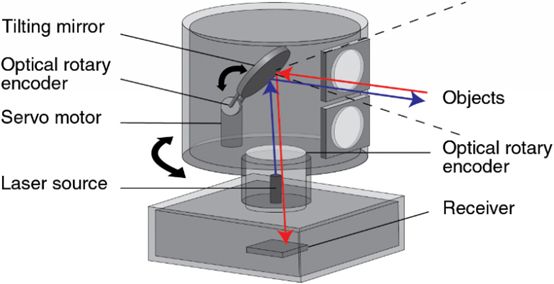
注:本圖參照[3]中圖片
圖3-3激光雷達光學掃描器部分
3.2.3光電檢測器
光電檢測器即讀取和記錄反射回到激光雷達的信號的設備。主要有兩種光電檢測技術,分別為固態檢測器(Solid State Detector)和光電倍增管[2]。
3.2.4導航系統
當激光雷達安裝在移動的平臺,如衛星和飛機上時,它需要其它設備的協助以確定設備當前的位置和轉向信息,這樣才能保證激光雷達測量數據的可用性。衛星導航系統(GNSS, Global Navigation Satellite System)可以提供準確的地理位置信息,慣性測量單元(IMU,Inertial Measurement Unit)則記錄當前位置激光雷達的姿態和轉向信息。GNSS和IMU配合使用,可以將激光雷達測量點由相對坐標系轉換為絕對坐標系上的位置點,從而應用于不同的系統中[2]。
3.3 激光雷達技術指標
3.3.1線束
為獲得盡量詳細的點云圖,激光雷達必須要快速采集周圍環境的數據。一種方式是提高發射機/接收機的采集速度,每個發射機在每秒內可以發送十萬以上組脈沖,也就是說在1秒內,有100,000組脈沖完成一次發射/返回的循環。復雜的激光雷達有高達64組發射機/接收機,組就是線(Channel)的意思,線表示激光雷達系統包含獨立的發射機/接收機的數目。多線的配置使得激光雷達在每秒內可構建高達百萬的數據點。
圖3-4示例多線激光雷達掃描的點云,圖中每個同心圓表示一組激光器掃描的點云。對于兩組相鄰的激光器而言,其垂直間隔角為常量(下文“垂直角分辨率”將介紹到)。因此距離越遠,相鄰激光器掃描的點云同心圓間隔越大。也就是說,距離越遠,數據的保真度越低。激光雷達對于近處的物體有更高的分辨率[2]。
注:本圖參照[4]中圖片
圖3-4 Velodyne HDL-64激光雷達系統掃描的點云圖
3.3.2方位角
方位角(Field of View, FOV)包括水平方位角和垂直方位角,指的是激光雷達在水平和垂直方向的檢測角度。
上面提到線的概念,然而在實際應用中,64線對于構建周圍環境精確的點云是遠遠不夠的,它只能在有限范圍內達到足夠的精度。但是在制造工藝上,把線數提高到64組以上,將大大提高設備的成本,因此不少激光雷達系統采用旋轉鏡頭,如圖3-5,激光雷達的主體部分固定在旋轉馬達的基座上,工作時不斷旋轉,即可對周圍360°進行掃描,也就是說這些激光雷達的水平方位角為360°。
垂直方位角指的是激光雷達垂直方向的檢測角度,一般在40°以內[2]。VelodyneHDL-64E幾個激光發射單元之間有一定間隙,如圖3-6所示。
注:本圖參照[5]中圖4.2
圖3-5 Velodyne HDL-64E水平掃描示意圖
注:本圖參照[5]中圖4.1
圖3-6 Velodyne HDL-64E垂直掃描示意圖
3.3.3掃描幀頻
激光雷達點云數據更新的頻率。對于混合固態激光雷達來說,也就是旋轉鏡每秒鐘旋轉的圈數,單位Hz。例如,10 Hz即旋轉鏡每秒轉10圈,同一方位的數據點更新10次[2]。
3.3.4角分辨率
角分辨率分為水平角分辨率和垂直角分辨率。水平角分辨率是指水平方向上掃描線間的最小間隔度數。它是隨掃描幀頻的變化而變化,轉速越快,則水平方向上掃描線的間隔越大,水平角分辨率越大。垂直角分辨率指的是垂直方向上兩條掃描線的間隔度數[2]。
3.3.5測量精度
激光雷達的數據手冊中的測量精度(Accuracy)常表示為,例如±2 cm的形式。精度表示設備測量位置與實際位置偏差的范圍[2]。
3.3.6探測距離
激光雷達的最大測量距離。在自動駕駛領域應用的激光雷達的測距范圍普遍在100~200 m左右[2]。
3.3.7數據率
激光雷達每秒鐘生成的激光點數,例如:40線掃描幀頻為20 Hz的激光雷達,水平角分辨率是0.45°(每一圈每束激光掃描800次)。因此每秒鐘生成的激光點數和為:4020800 = 640, 000 points/sec[2]。
3.4 激光雷達測試分析
市場上車載激光雷達種類、型號繁雜,其中Velodyne HDL-64E是最受歡迎的激光雷達之一,其所使用的激光是Category 1類型,以大約10赫茲的頻率快速旋轉。同時,每個激光脈沖的波長為905納米,平均功率為2毫瓦,相當于是標準10瓦LED大燈泡在近光燈設置下的功率輸出的0.02%。這意味著任何單個激光束將在大約1毫秒內掃過眼睛,平均功率小于普通的激光指示器。并且由于每個單獨的激光器以不同的方向和角度安裝,所以多個激光器不能一次同時直射眼睛并增加功率。即使行人有意盯著Velodyne傳感器,低功耗和快速旋轉的組合情況下也是Category 1級,十分安全。
另外,它由激光發射機、光學接收機、轉臺和信息處理系統等組成,激光器將電脈沖變成光脈沖發射出去,光接收機再把從目標反射回來的光脈沖還原成電脈沖,送到顯示器。
其基本參數、實際輸出數據格式和結構如表3-1、表3-2和圖3-7所示:
表3-1 Velodyne HDL-64E型激光雷達參數
| 參數Parameters | 數值 |
| 激光器個數Channels | 64 |
| 掃描距離Range | 100 ~ 120 m |
| 掃描精度Accuracy | ±2cm |
| 返回數據Data | 距離/強度 |
| 數據傳輸率Data Rate | 1.3M ~ 2.2M points/sec |
| 垂直方位角Vertical FOV | 26.8° |
| 垂直分辨率Vertical Resolution | ~ 0.4° |
| 水平方位角Horizontal FOV | 360° |
| 水平分辨率Horizontal Resolution |
5 Hz: 0.08° 10 Hz: 0.17° 20 Hz: 0.35° |
| 輸入電壓Input Voltage | 10 ~ 32 VDC |
| 功率Power | 60 W |
| 重量Weight | 15 Kg |
| 尺寸Size | 203284 mm |
| 運行溫度Operating Temperature | -10℃ ~ 50℃ |
表3-2激光雷達輸出數據格式表
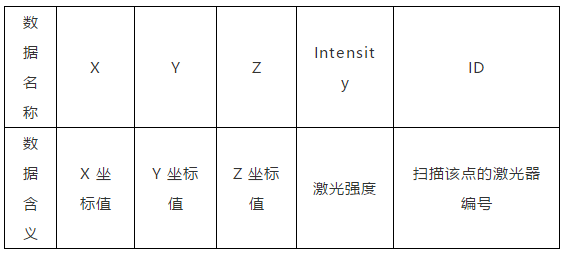
圖3-7 Velodyne HDL-64E激光雷達組成示意圖
利用有幸從別處取得的HDL-64E的數據,繪制得到點云圖的其中一幅如下:
圖3-8 HDL-64E實際數據所繪制的點云圖
根據表3-2可得,HDL-64E所輸出的數據為點的X,Y,Z坐標,激光強度以及激光器的編號,由于對激光雷達的仿真不需要模擬出激光強度的效果,所以只需要對其他四個數據進行獲取。
至于點云圖的繪制,是對實際數據處理之后按照Z軸坐標的不同顯示,不過實際數據和仿真采集數據的不同在于,實際數據中的點的坐標都是符合激光雷達數據規范的,仿真需要考慮的是將采集到的點篩選出符合規范的,再顯示出來。下一節將會分別對模塊仿真、數據處理、數據仿真進行詳細說明。
3.5本章小結
本章通過了解激光雷達的分類、基本工作原理、主要技術指標,對用于智能車的車載激光雷達的主要產品進行調研,獲得主流產品的主要性能指標參數、測試數據等。
第 4 章 激光雷達仿真技術要求
4.1 模塊仿真
本文第3.2節詳細說明了激光雷達的主要組成模塊,在對激光雷達仿真時,可以考慮按模塊分類并仿真。
實際的激光雷達是先發射激光束再接收返回的激光束而獲取到點的坐標,并且其中還要依靠光學掃描器和光學檢測器才能完成這一復雜的過程,而仿真的激光雷達只需要模擬激光器,也就是激光發射裝置,進而獲取到點的坐標,最后繪制成圖即可。根據仿真經驗,可以考慮使用OpenGL中透視投影的一點透視的方式設置相機視角,然后通過編寫shader從相機中獲取點數據。如圖3-1所示,透視投影的視線(投影線)是從視點(觀察點)出發,所有視線從視點出發,視線是不平行的。所以可以用OpenGL的配置透視投影的相機來充當激光雷達的觀察方式,然后從相機中設法取出在該視角下觀察場景的位置信息即可完成激光雷達的模擬。那么如何設置相機呢?首先,在使用OpenGL的透視投影的方式獲取點的數據時,根據HDL-64E的水平方位角為360°,垂直方位角為26.8°,掃描最長距離為120 m,考慮使用四個相機拼合的方式實現,其中每個相機上仰角度為2°,下俯角度為24.9°,水平張角為90°,遠處裁剪處為120,然后獲取數據。
圖4-1透視投影原理
根據以上的分析,大致可以將激光雷達的仿真分為兩個模塊,一是激光發射模塊,其中包括了對獲取到的數據的處理過程(篩選過程);二是建模模塊,用于對激光雷達仿真的精度測試和算法驗證。
4.2 數據處理
由于本文只對于仿真激光雷達提供一個方向,具體的實現方法是多元的,接下來只對其中一種方法在仿真HDL-64E時的實現過程作大致說明。由于我們需要取出點的位置信息,而在shader關于頂點信息的只有 gl_Vertex這個內置變量。經過用例檢測后,發現gl_Vertex的頂點信息是該點相對于當前模型的相對坐標,若想將其變化為我們需要的位置信息還需進行矩陣變換。根據公式
相對位置 = 相機的模型矩陣 × 模型的模擬矩陣 × 目標點相對模型的相對坐標
將模型的投影矩陣右乘gl_Vertex,再右乘傳進的相機的投影矩陣,便得出此點相對于相機視點(即激光雷達的位置)的相對坐標。值得注意的是,由于本算法是在OSG中運行的,因為OSG中矩陣的右乘等于OpenGL的左乘,故造成這里的公式和上文提到的公式不同。
4.3 數據傳輸
數據傳輸的方法有很多種,比如共享內存、以文件形式輸出、利用網絡傳輸等,本節只對實現數據傳輸的其中一種的實現過程加以說明。一般來說,激光雷達仿真需要實現動態的實時場景顯示和點云圖顯示。動態的實時場景顯示,可以考慮多加一個相機進行顯示。而點云圖的繪制可以根據四個相機取到的數據,不以文件形式輸出,而是將數據寫進內存,直接從內存里獲得點數據信息并利用OpenGL繪制出來。從內存里直接取數據則需要做到共享內存,也就是要滿足進程間的通信,在渲染場景時將數據寫在一個內存地址里,繪制點云圖時利用這個內存地址找到點數據的存儲地址并取出數據,這樣的方式可以使得渲染和繪制的效率都提高,要做到動態繪制時也更為方便,但進程間的先后關系需要做一定的控制,否則容易出現繪制時內存地址里沒有數據或者是錯誤數據的情況。
4.4本章小結
經過歸納、分析前文中的內容,最終得出智能車輛車載激光雷達仿真系統的主要技術要求以及針對于主流產品Velodyne HDL-64E的一種基本的仿真思路。
-
汽車電子
+關注
關注
3024文章
7883瀏覽量
166547 -
激光雷達
+關注
關注
967文章
3943瀏覽量
189625 -
自動駕駛
+關注
關注
783文章
13694瀏覽量
166165
原文標題:自動駕駛車載激光雷達技術現狀分析
文章出處:【微信號:AItists,微信公眾號:人工智能學家】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
醫療機器人發展現狀與趨勢
工控機廠家發展現狀及未來趨勢

《RISC-V產業年鑒2023》發布,洞察產業發展現狀與趨勢

反制無人機的技術進展:國內外先進系統與技術概覽

2.晶體和振蕩器 行業研究及十五五規劃分析報告(行業發展現狀及“十五五”前景預測)
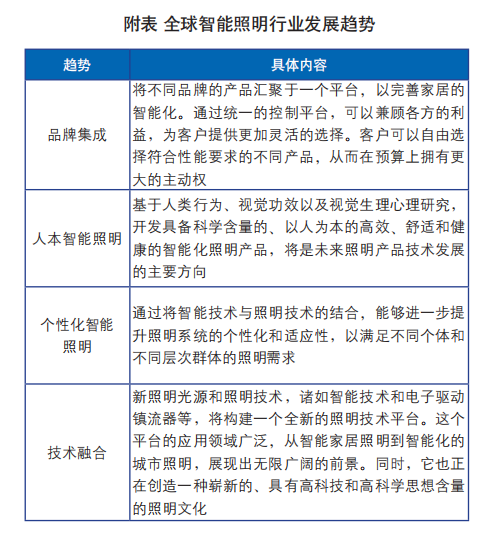
淺談智能照明產業的發展與研究
國內外塑封器件聲掃試驗標準現狀及問題
巖土工程監測儀器振弦采集儀的發展歷程與國內外研究現狀
萬兆電口模塊的產業發展現狀與前景展望
乘用車一體化電池的發展現狀和未來趨勢

博捷芯BJCORE:劃片機行業背景、發展歷史、現狀及趨勢
國內外智能駕駛計算芯片發展現狀

光伏行業發展現狀與發展趨勢報告






 工商網監
工商網監
評論