") 使用系統(tǒng)服務(wù)和器件驅(qū)動(dòng)器的遷移步驟介紹
使用系統(tǒng)服務(wù)和器件驅(qū)動(dòng)器的遷移步驟介紹
在本培訓(xùn)模塊中,我們將帶您了解將使用系統(tǒng)服務(wù)和器件驅(qū)動(dòng)器1.0 API的VisualDSP++? Blackfin項(xiàng)目遷移到CrossCore? Embedded Studio及系統(tǒng)服務(wù)和器件驅(qū)動(dòng)器2.0 API的各個(gè)步驟。
聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
驅(qū)動(dòng)器
+關(guān)注
關(guān)注
52文章
8164瀏覽量
146030 -
API
+關(guān)注
關(guān)注
2文章
1486瀏覽量
61820
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
云計(jì)算遷移的步驟與注意事項(xiàng)
云計(jì)算遷移是一個(gè)復(fù)雜且關(guān)鍵的過(guò)程,需要細(xì)致的規(guī)劃和執(zhí)行。以下是云計(jì)算遷移的一般步驟及注意事項(xiàng): 一、云計(jì)算遷移的步驟 準(zhǔn)備階段 評(píng)估目標(biāo)云環(huán)
伺服驅(qū)動(dòng)器和伺服電機(jī)介紹
在工業(yè)自動(dòng)化和精密控制領(lǐng)域,伺服系統(tǒng)扮演著至關(guān)重要的角色。與傳統(tǒng)的變頻技術(shù)相比,伺服系統(tǒng)具備更精確的控制能力和更高的性能水平。 一、驅(qū)動(dòng)器 伺服驅(qū)動(dòng)器在發(fā)展了變頻技術(shù)的前提下,實(shí)現(xiàn)了更
線路驅(qū)動(dòng)器工作原理_線路驅(qū)動(dòng)器輸入差模電壓范圍
線路驅(qū)動(dòng)器的工作原理主要基于信號(hào)的放大、轉(zhuǎn)換和驅(qū)動(dòng)技術(shù),其工作原理可以細(xì)分為以下幾個(gè)關(guān)鍵步驟:
技術(shù)分享 柵極驅(qū)動(dòng)器及其應(yīng)用介紹
一、柵極驅(qū)動(dòng)器介紹
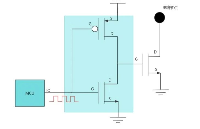
1)為什么需要柵極驅(qū)動(dòng)器?
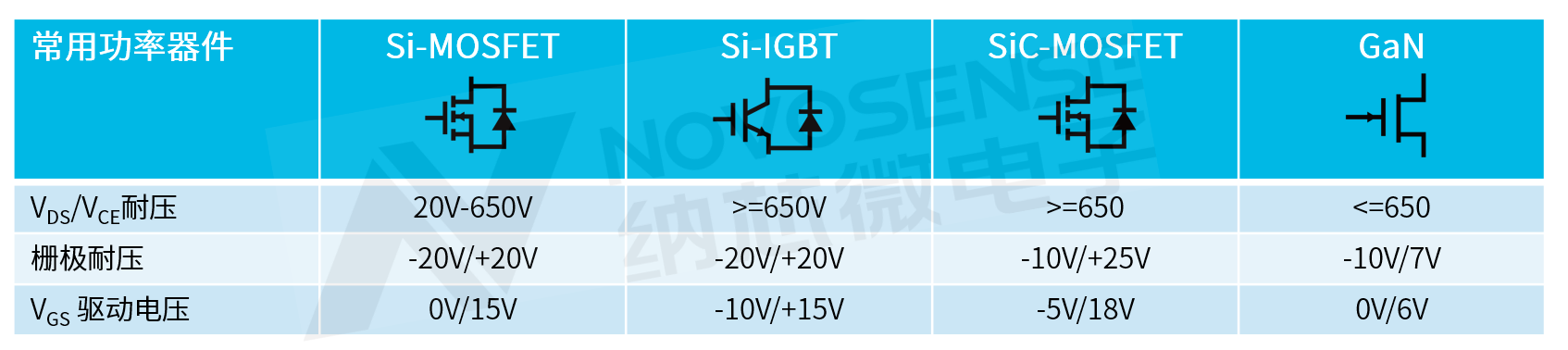
2)功率器件開(kāi)關(guān)過(guò)程介紹
3)三種常見(jiàn)驅(qū)動(dòng)
交流伺服驅(qū)動(dòng)器怎么接線
交流伺服驅(qū)動(dòng)器的接線是一個(gè)相對(duì)復(fù)雜但重要的過(guò)程,它涉及到對(duì)驅(qū)動(dòng)器、電機(jī)以及控制信號(hào)的精確連接。下面將詳細(xì)介紹交流伺服驅(qū)動(dòng)器的接線步驟、注意事
松下伺服驅(qū)動(dòng)器慣量比怎么改
松下伺服驅(qū)動(dòng)器是工業(yè)自動(dòng)化領(lǐng)域中常用的一種高性能驅(qū)動(dòng)器,具有高精度、高響應(yīng)速度、高穩(wěn)定性等特點(diǎn)。在實(shí)際應(yīng)用中,為了滿足不同負(fù)載的控制需求,需要對(duì)伺服驅(qū)動(dòng)器的慣量比進(jìn)行調(diào)整。本文將詳細(xì)介紹
柵極驅(qū)動(dòng)器芯片的原理是什么
介紹柵極驅(qū)動(dòng)器芯片的原理、結(jié)構(gòu)、功能和設(shè)計(jì)要點(diǎn)。 ### 1. 柵極驅(qū)動(dòng)器芯片的基本原理 柵極驅(qū)動(dòng)器芯片的主要任務(wù)是為功率電子器件的柵極提供
柵極驅(qū)動(dòng)器芯片有哪些作用
的開(kāi)關(guān)操作。本文將詳細(xì)介紹柵極驅(qū)動(dòng)器芯片的作用、工作原理、關(guān)鍵特性以及應(yīng)用領(lǐng)域。 ### 一、柵極驅(qū)動(dòng)器芯片的作用 1. **精確控制**:柵極驅(qū)動(dòng)器芯片能夠精確控制功率
驅(qū)動(dòng)器的工作原理
及應(yīng)用。 一、驅(qū)動(dòng)器的工作原理 驅(qū)動(dòng)器的工作原理是通過(guò)能量轉(zhuǎn)換,將輸入的能量轉(zhuǎn)換為機(jī)械能,從而實(shí)現(xiàn)對(duì)負(fù)載的驅(qū)動(dòng)。驅(qū)動(dòng)器的工作原理可以分為以下幾個(gè)步驟
什么是驅(qū)動(dòng)器
計(jì)算機(jī)系統(tǒng)的穩(wěn)定運(yùn)行和性能發(fā)揮至關(guān)重要。本文將詳細(xì)介紹驅(qū)動(dòng)器的概念、分類、工作原理、安裝與更新、故障診斷與排除等方面的內(nèi)容。 一、驅(qū)動(dòng)器的概念 驅(qū)動(dòng)
安川伺服驅(qū)動(dòng)器參數(shù)設(shè)置步驟
的安裝 2.1 環(huán)境要求 在安裝安川伺服驅(qū)動(dòng)器之前,需要確保安裝環(huán)境滿足以下要求: 環(huán)境溫度:0℃~55℃; 相對(duì)濕度:10%~90%(無(wú)結(jié)露); 無(wú)腐蝕性氣體、無(wú)強(qiáng)烈振動(dòng)、無(wú)強(qiáng)磁場(chǎng)干擾。 2.2 安裝步驟 將驅(qū)動(dòng)器放置在穩(wěn)定的
電橋電路柵驅(qū)動(dòng)器和MOSFET柵驅(qū)動(dòng)器產(chǎn)品介紹
電橋電路柵驅(qū)動(dòng)器和MOSFET柵驅(qū)動(dòng)器產(chǎn)品介紹
伺服電機(jī)驅(qū)動(dòng)器設(shè)置參數(shù)教程
伺服電機(jī)驅(qū)動(dòng)器是現(xiàn)代工業(yè)控制領(lǐng)域中廣泛應(yīng)用的一種設(shè)備。通過(guò)合理設(shè)置參數(shù),可以實(shí)現(xiàn)電機(jī)的高精度定位、速度控制和力矩控制等功能,提高生產(chǎn)效率和產(chǎn)品質(zhì)量。本文將詳細(xì)介紹伺服電機(jī)驅(qū)動(dòng)器的設(shè)置參數(shù)方法和
伺服驅(qū)動(dòng)器怎么設(shè)置參數(shù)
伺服驅(qū)動(dòng)器是現(xiàn)代工業(yè)自動(dòng)化系統(tǒng)中常用的一種執(zhí)行控制的設(shè)備,它能夠通過(guò)電信號(hào)控制電機(jī)的速度和位置。設(shè)置伺服驅(qū)動(dòng)器的參數(shù)是使用伺服驅(qū)動(dòng)器前必須要進(jìn)行的一項(xiàng)工作,下面將從硬件安裝和軟件配置兩
驅(qū)動(dòng)器的分類及應(yīng)用
驅(qū)動(dòng)器是電機(jī)控制系統(tǒng)中至關(guān)重要的一部分,它負(fù)責(zé)將控制信號(hào)轉(zhuǎn)化為電能輸出,驅(qū)動(dòng)電機(jī)正常運(yùn)行。根據(jù)電機(jī)的不同類型和應(yīng)用場(chǎng)景,驅(qū)動(dòng)器可以分為有刷電機(jī)驅(qū)動(dòng)器





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論