") 200幀高速采集,INDEMIND雙目視覺慣性模組助力立體視覺應(yīng)用升級
200幀高速采集,INDEMIND雙目視覺慣性模組助力立體視覺應(yīng)用升級
近年來,機(jī)器人、深度學(xué)習(xí)、姿態(tài)檢測、自動駕駛等前沿領(lǐng)域的高速發(fā)展為計(jì)算機(jī)視覺領(lǐng)域拓展了巨大增量,創(chuàng)造了新的千億級市場,與此同時,這些不斷高速發(fā)展的“推手”也對計(jì)算機(jī)視覺提出了新的需求,開始倒逼計(jì)算機(jī)視覺技術(shù)升級進(jìn)步。
丨深耕不輟,實(shí)現(xiàn)業(yè)內(nèi)首款200幀雙目慣性相機(jī)
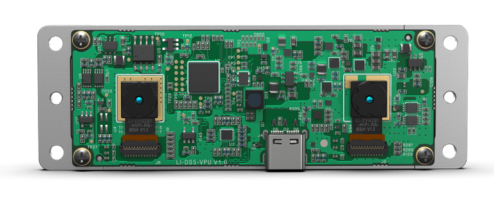
面對日益提升的使用需求,為提升產(chǎn)品適用性,INDEMIND深耕不輟,為旗下雙目視覺慣性模組提供了200幀高速環(huán)境獲取能力,滿足了不同場景的使用需求。
雙目視覺慣性模組是目前業(yè)界首款可連續(xù)輸出200幀圖像及IMU數(shù)據(jù)的雙目慣性相機(jī),用戶可自行調(diào)節(jié)1280*800分辨率下25/50/100FPS、640*400分辨率下25/50/100/200FPS不同圖像輸出,可為三維重建、深度解算、視覺SLAM等應(yīng)用研發(fā)提供更精準(zhǔn)、豐富的環(huán)境圖像信息。
眾所周知,自動駕駛、姿態(tài)檢測等場景非常依賴雙目立體相機(jī)采集圖像、位姿信息的清晰度、豐富度,單位時間內(nèi)雙目相機(jī)提供的信息越多,越有利于相關(guān)場景的算法追蹤及定位,降低算法開發(fā)難度。
丨采集豐富人體姿態(tài)信息,賦能動作捕捉
引用自《openpose》
以動作捕捉為例,在影視創(chuàng)作、VR虛擬人物等應(yīng)用場景,姿態(tài)檢測是其工業(yè)領(lǐng)域不可或缺的一環(huán)。但傳統(tǒng)姿態(tài)檢測技術(shù)需要在被捕捉物體的身上標(biāo)記諸多光學(xué)標(biāo)記,并且需要至少兩個以上的傳感器來采集被捕捉物體的運(yùn)動信息及慣性信息,捕捉過程極為復(fù)雜和漫長,并需要對捕捉過程中產(chǎn)生的大量數(shù)據(jù)進(jìn)行后期處理,才能實(shí)現(xiàn)近乎真實(shí)的動作捕捉三維模型重建。而隨著INDEMIND雙目視覺慣性模組采集幀率的突破,在精確度及采集速度上取得了大幅提升,呈現(xiàn)出了更精細(xì)及更具動作連續(xù)性的姿態(tài)檢測效果,這也意味著單位時間內(nèi),雙目慣性模組可采集更豐富的人體姿態(tài)信息,為后期算法處理,提供更多數(shù)據(jù)。
丨高速采集路況信息,實(shí)現(xiàn)高速機(jī)動自動駕駛
圖片來源:百度搜索
更值得一提的是,視覺作為自動駕駛系統(tǒng)的重要環(huán)境感知入口,是其重要核心組成部分。在自動駕駛系統(tǒng)中,計(jì)算機(jī)視覺著重負(fù)責(zé)提供環(huán)境感知,如路況檢測、指示標(biāo)牌識別、車道檢測等一些列環(huán)境識別、感知。在這一工作進(jìn)程中,信息收集、算法處理、結(jié)果輸出等三大環(huán)節(jié)在以往的自動駕駛中,由于視覺傳感器的限制,無法快速收集并反饋環(huán)境信息,使得視覺在整個系統(tǒng)中的無法凸顯其關(guān)鍵作用。
以車道檢測為例,在車道檢測環(huán)節(jié)中,視覺需對道路彎曲、陰影、路面變化、標(biāo)識線變化等路況實(shí)時反饋分析,并通過深度學(xué)習(xí)算法,自動生成車輛最佳行駛路線。而想要實(shí)現(xiàn)快速機(jī)動反應(yīng),便需要高速的環(huán)境采集能力,INDEMIND雙目視覺慣性模組的圖像采集幀率可達(dá)到200幀,在遇到車道變化時,雙目視覺慣性模組可以0.005秒/幀的速度快速檢測車道變化,并通過連續(xù)多幀分析車道變化趨勢,為自動駕駛算法提供多方面精準(zhǔn)、快速的環(huán)境信息數(shù)據(jù),輔助算法實(shí)現(xiàn)高機(jī)動自動駕駛。
除了上面說的例子,雙目視覺慣性模組幀率提升至200幀的背后,意味著環(huán)境信息采集能力的巨大提升,還可在環(huán)境感知、三維識別、深度解算、三維建圖等諸多應(yīng)用領(lǐng)域發(fā)揮更多、更深層次的作用,極大推進(jìn)計(jì)算機(jī)視覺技術(shù)向相關(guān)領(lǐng)域的擴(kuò)展。
-
計(jì)算機(jī)視覺
+關(guān)注
關(guān)注
8文章
1696瀏覽量
45928
發(fā)布評論請先 登錄
相關(guān)推薦
立體視覺新手必看:英特爾? 實(shí)感? D421深度相機(jī)模組
居然還有這樣的10.1寸光場裸眼3D視覺訓(xùn)練平板電腦?

高速機(jī)器視覺行業(yè)市場分析

新品 | Bumblebee X系列用于高精度機(jī)器人應(yīng)用的新型立體視覺產(chǎn)品

機(jī)器視覺中圖像采集卡的功能與應(yīng)用
AIDI工業(yè)AI視覺檢測軟件介紹
銀牛微電子3D視覺感知方案賦能小米CyberDog系列仿生四足機(jī)器人
總投資1.5億!蘇州清研微視立體視覺傳感器項(xiàng)目落戶安徽蕪湖

三維視覺測量技術(shù):被動視覺測量和主動視覺測量
雙目立體視覺是什么樣的技術(shù)?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論