 什么是陀螺儀呢?陀螺儀的基本知識
什么是陀螺儀呢?陀螺儀的基本知識
前面介紹了慣性測量單元IMU在自動駕駛和導航中的重要作用,也了解到了IMU里面重要的組成部分就是陀螺儀,那么什么是陀螺儀呢?接下來我們就從頭來了解一下陀螺儀的基本知識。
陀螺儀的另一種叫法又稱角速度傳感器,從定義上來看陀螺儀是測量載體角運動或者角速度的傳感器從應用的角度上來看,陀螺儀多用于導航、定位等系統常用實例如手機GPS定位導航、衛星三軸陀螺儀定位,其陀螺儀的精度在整個過程中起到了至關重要的作用,也就是高精度的陀螺儀直接決定了慣性導航系統的精度以及制導和自動控制系統的性能品質。
早在17世紀,在牛頓生活的年代,對于高速旋轉剛體的力學問題已經有了比較深入的研究,奠定了機械框架式陀螺儀的理論基礎。1852年,法國物理學家傅科為了驗證地球的自轉,制造了最早的傅科陀螺儀,并正式提出了 “陀螺”這個術語。但是,由于當時制造工藝水平低,陀螺儀的誤差很大,無法觀察、驗證地球的自轉。到了19世紀末20世紀初,電動機和滾珠軸承的發明,為制造高性能的陀螺儀提供了有力的物質條件。同時,航海事業的發展推動陀螺儀進入了實用階段。在航海事業蓬勃發展的20世紀初期,德國探險家安休茨想乘潛艇到北極去探險,他于1904年制造出世界上第一個航海陀螺羅經,開辟了陀螺儀表在運動物體上指示方位的道路。與此同時,德國科學家舒勒創造了“舒勒調諧理論”,這成為陀螺羅經和導航儀器的理論基礎。
中國是世界文明發達最早的國家之一,在陀螺技術方面,我國也有很多發明創造。比如在傳統雜技藝術中表演的快速旋轉的轉碟節目,就是利用了高速旋轉的剛體具有穩定性的特性。在將高速旋轉的剛體支承起來的萬向架的應用方面,西漢末年,就有人創造了與現在萬向支架原理完全相同的“臥褥香爐”。這種香爐能“環轉四周而爐體常平,可置被褥中”。實際上是把這種香爐放在一個鏤空的球內,用兩個圓環架起來,利用互相垂直的轉軸和香爐本身的質量,在球體做任意滾動時,香爐始終保持平穩,而不會傾灑。
隨著航空事業的發展,到了20世紀30年代,航空氣動陀螺地平儀、方向儀和轉彎儀等已經被制造出來了。在第二次世界大戰末期,陀螺儀作為敏感元件被用于導彈的制導系統中。特別是20世紀60年代以來,隨著科學技術的發展,為了滿足現代航空、航海特別是宇宙航行的新要求,相繼出現了各種新型陀螺儀。目前,陀螺儀正朝著超高精度、長壽命、小體積和低成本等方向發展。
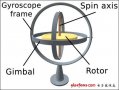
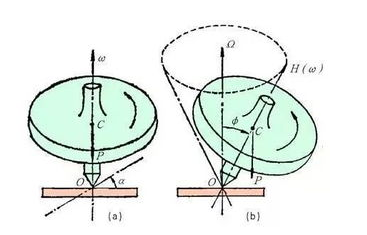
那么,究竟什么是陀螺儀呢?傳統的陀螺儀定義是:對稱平衡的高速旋轉剛體(指外力作用下沒有形變的物體),用專門的懸掛裝置支承起來,使旋轉的剛體能繞著與自轉軸不相重合(或不相平行)的另一條(或兩條)軸轉動的專門裝置。其中,陀螺儀的對稱軸亦即自轉軸,稱為陀螺主軸。研究這類陀螺運動特性的理論就是動力學中剛體繞定點運動的動力學理論。
傳統陀螺儀的定義包括了一大類陀螺儀,稱為機械轉子式陀螺儀,如框架式陀螺儀、液浮陀螺儀、撓性陀螺儀、靜電陀螺儀等,都是依靠轉子的高速旋轉來實現角速度信息的測量。
隨著相關技術的發展,多種新原理的陀螺被研制出來,它們具有嶄新的特性,使陀螺儀家族的陣營在不斷擴大。我們把能自主地測量物體角速度或角位移的器件也稱為陀螺儀,包括光學陀螺儀、振動陀螺儀、硅微機械陀螺儀等。
自Sperry發明了全球第一個實用的陀螺儀至今,陀螺技術已經經歷了近百年的發展。下圖為陀螺技術百年發展史的簡單回顧。
回顧陀螺技術100年的發展,它們大致可分為以下三個階段:
階段Ⅰ:機械轉子式陀螺階段
始于20世紀40年代,當時代表性的應用是在第二次世界大戰末期德國研制的V-2導彈上。不管哪種機械轉子式陀螺,其基本工作原理都是依據牛頓第二定律(F=ma)。傳統的機械轉子式陀螺的發展過程,可以說是與框架支承干擾力矩作斗爭的過程。此后很長一段時間,提高陀螺性能的主要難題是如何克服作用在陀螺框架軸上的各種外干擾力矩,從而保持其旋轉軸在空間的精確指向。根據這一思路,人們先后研制成功了液浮陀螺、靜壓氣浮陀螺、動壓氣浮陀螺、三浮陀螺以及靜電陀螺等。如下圖所示,列出了各類機械轉子式陀螺儀的外觀照片。
階段Ⅱ:光學陀螺階段
20世紀60年代末70年代初,微型計算機技術開始被引入慣性導航系統,出現了把陀螺儀直接固聯在運動載體上的捷聯式慣性導航系統。捷聯式慣性導航系統采用數學平臺來代替原來的物理平臺,早期捷聯式慣性導航系統采用的陀螺儀的典型代表是動力調諧陀螺儀。
光學陀螺作為嶄新原理的全固態陀螺,它是根據愛因斯坦相對論原理(E=mc2)研制成功的。20世紀70年代中期,環形激光陀螺儀問世,這是陀螺歷史上最大的技術進步;20世紀80年代中期,干涉型光纖陀螺儀研制成功。激光陀螺和光纖陀螺的研制成功,開拓了光學陀螺導航新時代的到來。光學陀螺這一稱謂是從機械轉子式陀螺延續下來的,它實際上是一種角速率傳感器。光學陀螺作為一種性能非常優良的慣性傳感器,它的地位提升應歸功于捷聯式慣性導航系統的出現,反之,也正是由于它的研制成功,才使捷聯式慣性導航系統走向實用。
目前,光學陀螺主要包括環形激光陀螺和干涉型光纖陀螺兩大類(見下圖),它們是捷聯慣性導航系統的理想元件,已被應用到幾乎各種類型的慣性導航系統中。
階段Ⅲ:微機械陀螺階段
20世紀80年代初,在微米/納米(micro/nanotechnology,分別為10^-6/10^-9米量級)技術這一引人注目的前沿技術背景下,微機電系統(Micro ElectroMechanical systems,簡稱MEMS)引起了人們廣泛的關注。微機電系統是指對微米/納米材料進行設計、加工、制造、測量和控制的技術。它可將機械構件、光學系統、驅動部件、電控系統集成為一個整體單元的微型系統。這種微機電系統不僅能夠采集、處理與發送信息或指令,還能夠按照所獲取的信息自主地或根據外部的指令采取行動。它用微電子技術和微加工技術(包括硅體微加工、硅表面微加工、LIGA和晶片鍵合等技術)相結合的制造工藝,制造出各種性能優異、價格低廉、微型化的傳感器、執行器、驅動器和微系統。微機電(MEMS)是近年來發展起來的一種新型多學科交叉的技術,該技術將對未來人類生活產生革命性的影響。它涉及機械、電子、化學、物理、光學、生物、材料等多學科。
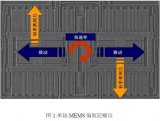
在此基礎上,80年代中期,出現了微機械陀螺,即MEMS陀螺,也稱為硅微陀螺,它是采用微米/納米技術,在不足1毫米見方的硅芯片上,采用類似半導體加工技術的微電子工藝進行加工而成的。它的制作是通過采用半導體生產中成熟的沉積、蝕刻和摻雜等工藝,將機械裝置和電子線路集成在微小的硅芯片上完成的,最終形成的是一種集成電路芯片大小的微型陀螺儀。經過多年的努力,1989年采用MEMS技術的第一個微機械陀螺問世,漂移率達10度/小時。它的出現是MEMS技術中具有代表性的一項重大成果,更帶來了慣性技術領域的一次新變革。由于采用了成熟的半導體加工技術,這種陀螺從概念提出到批量投產,僅用了五六年時間。
微機械陀螺(MEMS陀螺),它與其他振動陀螺一樣,都是基于哥氏效應原理工作的。所有的微機械陀螺都是非旋轉裝置,通過獲取一個振動機械元件上的哥氏加速度效應,實現角速率檢測。即一個驗證質量在一個平面內做正弦振動,如果此平面以角速率Ω旋轉,那么哥氏力就會使該質量以垂直于該平面的方向做正弦振動,其幅值正比于Ω。對哥氏力所引起的運動進行測量,就可獲得Ω的信號,這就是微機械陀螺的基本工作原理。
低成本微機械陀螺的研制成功,使得慣性導航系統的應用領域大為擴展,許多以前不能實現的應用變為現實,在軍用方面尤其加速了戰術武器制導化的進程。目前在車載導航中應用最廣的就是MEMS陀螺儀。
-
傳感器
+關注
關注
2548文章
50709瀏覽量
752089 -
陀螺儀
+關注
關注
44文章
780瀏覽量
98585 -
導航系統
+關注
關注
2文章
256瀏覽量
30675
原文標題:自動駕駛基礎(六十三) - -慣性測量單元(IMU)九
文章出處:【微信號:Analog_World,微信公眾號:模擬世界】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
詳解三軸陀螺儀的技術原理

三軸陀螺儀是什么_三軸陀螺儀在手機上的應用
三軸陀螺儀有什么用_三軸陀螺儀的作用

MEMS陀螺儀技術原理_三軸陀螺儀技術原理

淺談MEMS陀螺儀技術 MEMS是否取代光纖陀螺儀技術
光纖陀螺儀與旋轉式陀螺儀的工作原理解析
陀螺儀傳感器的分類_陀螺儀傳感器有什么用
什么是MEMS陀螺儀?
怎么解決陀螺儀角度漂移問題 三軸陀螺儀和六軸陀螺儀的區別
陀螺儀是什么?陀螺儀工作原理





 工商網監
工商網監
評論