 自動駕駛技術兩大陣營:ADAS和單車智能技術陣營,以及人工智能和網聯化技術陣營
自動駕駛技術兩大陣營:ADAS和單車智能技術陣營,以及人工智能和網聯化技術陣營
自動駕駛技術發展已經分化出兩大陣營:以汽車制造商為代表的ADAS和單車智能技術陣營,以及以互聯網企業為代表的人工智能和網聯化技術陣營。ADAS和單車智能技術陣營主要從現有的駕駛輔助安全技術出發,配合感知和控制決策,逐步實現智能化自動駕駛技術;人工智能和網聯化技術陣營則直接依靠智能計算及網絡通信實現對汽車的控制。除此之外,在系統集成和功能實現等方面,不同技術陣營之間、內部均存在一定差異。
無論是汽車制造商還是互聯網企業,實現汽車自動駕駛均采用環境信息感知識別——系統智能決策控制的技術框架。自動駕駛技術集自動控制、復雜系統、人工智能、機器視覺等于一體,收集云端和車載傳感器的車聯網數據、地理信息數據、環境感知數據等信息,識別車輛駕駛區域的環境特征,進行任務設定和控制規劃。
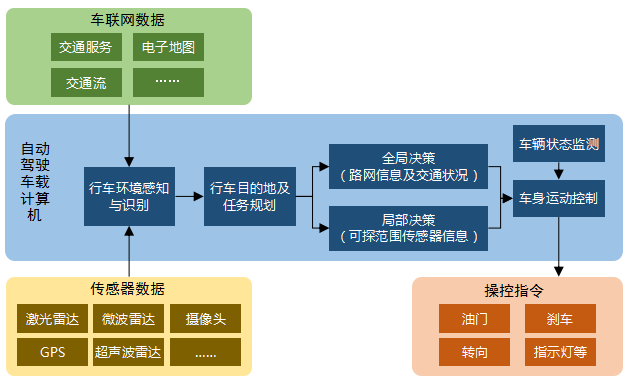
圖1 自動駕駛汽車基本技術方案
自動駕駛技術發展已經分化出兩大陣營:以汽車制造商為代表的ADAS和單車智能技術陣營,以及以互聯網企業為代表的人工智能和網聯化技術陣營。ADAS和單車智能技術陣營主要從現有的駕駛輔助安全技術出發,配合感知和控制決策,逐步實現智能化自動駕駛技術;人工智能和網聯化技術陣營則直接依靠智能計算及網絡通信實現對汽車的控制。除此之外,在系統集成和功能實現等方面,不同技術陣營之間、內部均存在一定差異。
總體方案
互聯網企業以谷歌、百度等為代表的人工智能和網聯化技術陣營,側重于高精度定位的引導,配合激光雷達、攝像頭、毫米波雷達、超聲波傳感器、GPS等傳感器,利用人工智能算法實現完全自主駕駛。其技術核心是高精度地圖的構建,以及各種傳感器的感知特征的匹配和融合。
汽車制造商如通用、沃爾沃、特斯拉等及其零部件供應商博世、Mobileye等為代表的ADAS和單車智能技術陣營,依靠攝像頭、毫米波雷達、超聲波傳感器等設備,側重于對行駛環境的精確感知,實現一定約束條件下的高級輔助駕駛功能,其核心競爭力是ADAS的技術積累及大量商用經驗。
汽車制造商與互聯網公司智能汽車技術發展路徑對比如圖2所示。從技術發展規律上看,汽車制造商依靠ADAS技術和功能的不斷完善,以緩解駕駛人駕駛壓力、提升駕駛體驗為目標,基于完善的整車制造經驗,逐步提出高等級的自動駕駛汽車;而互聯網企業則依據深度學習、圖像理解等人工智能技術,以計算機替代人類駕駛為目標,基于其先進的互聯網、云服務等技術,實現直接替代傳統汽車的完全自動駕駛汽車。
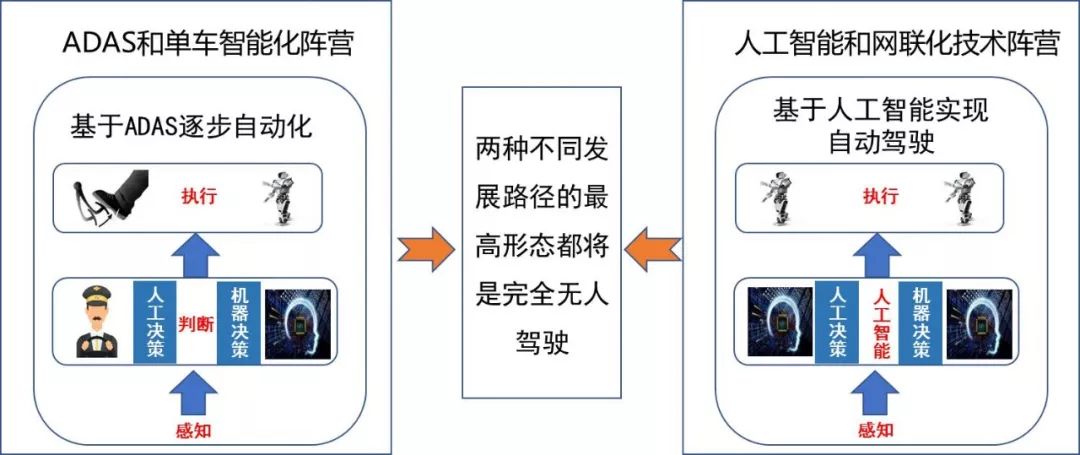
圖2 汽車制造商和互聯網企業的自動駕駛技術發展路徑
互聯網公司偏向于直接實現高等級的自動駕駛,其技術核心——深度學習算法,利用高性能處理器模擬多層神經網絡,讓機器掌握自主學習的能力。通過對道路場景標定數據的訓練,實現神經網絡對汽車、行人、標志標線、非機動車等交通因素的準確實時檢測。該技術需要通過采集海量數據不斷訓練和完善自動駕駛模型,提高汽車系統的深度學習能力和自主決策能力。
圖3 深度學習算法對汽車、行人、交通標志標線的識別
(地平線人工智能視覺芯片)
互聯網公司研發自動駕駛汽車的目的是實現對人工智能領域的重大探索創新和技術前沿布局。其擁有豐富的軟件開發經驗、強大的人才儲備、高效率的軟件開發和測試流程,因而能更早地、激進地實現自動駕駛的功能且無需背負變現的壓力。另外,互聯網公司在人工智能、人機交互服務層面具有較大的競爭優勢,進度或將大幅領先采取ADAS升級路線的傳統汽車制造商。
汽車制造商一般認為ADAS是實現汽車自動駕駛的過渡階段。通過ADAS功能的拓展和完善,漸進式地實現無人駕駛。目前,ADAS可以完成車輛的橫、縱向運動自動控制,但這種以輔助人類駕駛為目標的局部、分離的單項功能使其仍稱不上是智能汽車。汽車制造商希望通過多次技術方案的革新,并在得到相應收益的同時,逐步地到達最后的完全無人駕駛。
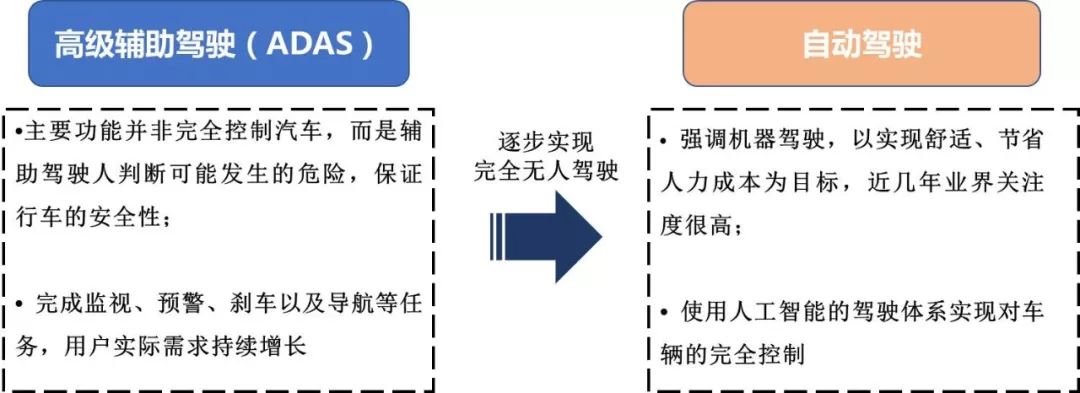
圖4 汽車制造商的自動駕駛實現途徑
汽車制造商的優勢主要在于技術積累,具備先發優勢且可以直接利用客戶資源快速迭代優化其智能系統,但其主營業務是整車的制造和銷售。因此,提供更好的駕駛體驗是其研發的動力,且仍需顧及研發成果的變現能力。這些顧慮可能會將其自動駕駛研究局限在ADAS領域。
綜上,不管哪種技術路線,實際上都是基于信息感知和處理,實現對行駛環境的準確識別,構建高精度的環境地圖驅動行駛,技術路線的基本步驟一樣,只是在每個具體步驟中,實現方法有所區別。例如,體現在自動駕駛汽車的外觀上,車頂上一般都有激光雷達裝置,車身四周裝有一系列的傳感器。
環境感知
自動駕駛技術的核心是實現汽車的“環境感知-決策規劃-控制執行”過程。環境感知作為第一環節,處于自動駕駛車輛與外界環境信息交互的關鍵位置,其關鍵在于使自動駕駛車輛更好地模擬人類駕駛者的感知能力,從而理解自身和周邊的駕駛態勢。因此,自動駕駛汽車對道路環境感知能力的好壞直接影響車輛的安全性和通行能力。如圖5所示,自動駕駛汽車需要集成攝像頭、激光雷達、微波雷達、紅外傳感器、超聲波雷達等傳感器,對道路環境近、中、遠距離以及各個角度探測,并對感知信息進行融合處理和識別環境中各個相關因素。攝像頭、雷達、定位導航系統等為自動駕駛車輛提供了海量的周邊環境及自身狀態數據。
圖5 自動駕駛汽車及其傳感器
目前自動駕駛環境感知的技術路線主要有兩種:一種是使用視覺主導的多傳感器融合方案,另一種以低成本激光雷達為主導。
視覺主導的環境感知技術采用多攝像頭、毫米波雷達、超聲波雷達和低成本激光雷達融合感知的方案。當前技術條件下,攝像機成像受環境光照的影響較大,基于人工智能的目標檢測與定位可靠性仍然較低,但其優勢在于傳感器成本低。
自從2016年5月,處于自動駕駛狀態的特斯拉電動車在美國佛羅里達州與卡車相撞的死亡事故發生后,特斯拉將視覺感知識別功能實現從Mobileye提供單目視覺技術替換為基于Nvidia Drive TX2計算平臺的特斯拉Vision軟件系統,使用深度學習算法替代基于傳統機器學習的視頻圖像識別方法,這也是當前互聯網公司提供的自動駕駛解決方案所采用的。截止到2018年年底,特斯拉通過Autopilot積累的自動駕駛里程已經達到近20億公里,其認為當前自動駕駛可靠性為98%,但要達到99.999%才能滿足安全水平。
激光雷達主導的感知技術使用了激光雷達、毫米波雷達、超聲波傳感器和攝像頭融合識別的方案。激光雷達采用主動激光測距的機制,形成激光點云圖像描述周邊障礙物分布,目標檢測與定位可靠性高,但缺乏周圍環境的顏色和紋理信息且成本高昂。
激光雷達主導的解決方案未來將沿兩種方向繼續推進商業化進程:一個是發展攝像頭與激光雷達結合的硬件模組,直接獲得彩色激光點云數據。另一個是降低激光雷達的硬件成本,比如研發固態激光雷達并真正實現產業化。
綜上,多傳感器融合是未來自動駕駛發展的必然趨勢,自動駕駛行業的終極目標是實現安全性極高的無人駕駛。從感知端角度出發,汽車上每增加一種傳感器進行融合使用,汽車相應的探測精度就會提高。因此,無論是采用視覺主導還是激光雷達主導的方案,必將在未來統一。汽車的感知層將按照各種傳感器的能力特性(如紅綠燈、標志標線識別依靠攝像頭;障礙物識別依靠激光雷達等),進行多層次地融合識別和結果校驗,得出高可靠的識別結果供決策。
車聯網
車聯網是實現自動駕駛技術的一種重要途徑,其核心在于車路協同技術。“聰明的路、智慧的車”的技術路線能夠彌補當前自動駕駛汽車在信息感知、分析決策上的不足,盡快實現車輛的智能化自動化運營。而車路協同所依賴的V2X通信技術,在國際上有兩大路線:一個是DSRC技術為基礎的方案,另一個是蜂窩路線。
基于V2V的DSRC(專用短程通信)的車聯網技術已比較成熟,DSRC(IEEE 802.11p)已公開發布,基于Ad-hoc機制動態拓撲組網,進行車間、車路通信,能夠360度全方位地實現V2V之間的通訊,覆蓋半徑可達2公里,時延在50ms以內,其獨特優勢在于技術成熟和安全可靠。
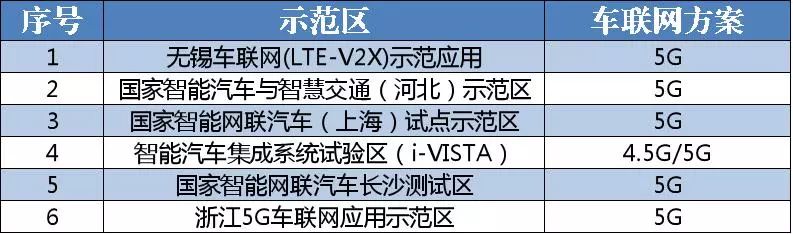
我國則對LTE-V和5G等基于蜂窩通信的車聯網通信技術與產業態度非常積極,其技術優勢在于網絡帶寬更大、通信時延更小。目前,幾個城市正在試點5G和LTE-V的部署。我國部分城市智能網聯汽車示范區車聯網方案如表1所示。
表1 我國部分城市智能網聯汽車示范區車聯網方案
總 結
從當前自動駕駛技術現狀水平來看,不管哪種技術路線,本質上都是通過多種傳感器、車聯網和互聯網的集成實現。通過車上的攝像頭、超聲波雷達、激光雷達、GPS等傳感器來獲得信息,然后對信息進行處理,最后實現車輛對環境的識別。
從技術發展來看,尚需要從以下幾個技術方面突破:融合環境感知與環境建模,并在5G通信、智能交通系統和車路協同技術的支撐下,實現極端環境與緊急情況下的可靠感知;滿足傳感器高可靠、低成本的商用化需求,解決多傳感器信息的融合問題;發展基于深度學習的環境感知和自主決策技術,實現自動駕駛汽車的自主駕駛學習能力,從而為自動駕駛產業的落地實踐打下堅實的技術基礎。
-
自動駕駛
+關注
關注
783文章
13687瀏覽量
166153
原文標題:自動駕駛汽車技術路線簡介
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
智能網聯汽車全球十大技術趨勢發布

智能駕駛技術發展趨勢
人工智能的應用領域有自動駕駛嗎
淺談自動駕駛技術的現狀及發展趨勢
risc-v在人工智能圖像處理應用前景分析
自動駕駛的未來之路:智能網聯與單車智能的交融
智能網聯是否是自動駕駛落地的必要條件?
深度學習在自動駕駛中的關鍵技術
自動駕駛下半場競爭的關鍵技術






 工商網監
工商網監
評論