 自動駕駛雷達傳感器迎來技術革命
自動駕駛雷達傳感器迎來技術革命
眾所周知,雷達技術的設計初衷是應用在軍事領域,用于識別或者跟蹤空中的軍事目標。但是在自動駕駛發展勢頭蓬勃的今天,人們更多的是通過自動駕駛汽車領域的相關報道或者文獻中了解雷達。自動駕駛中的雷達們是自動駕駛關鍵的一環——外部環境感知,提供最基本的技術支持。自動駕駛汽車在感知道路障礙物、行人等不確定因素時,發揮了巨大的作用。
以色列特拉維夫大學(TAU)一項研究發現,由光學相干斷層成像技術(OCT)啟發設計的低帶寬雷達,可以擺脫無線電帶寬的限制,以很低的帶寬或者不需要任何帶寬即可描繪出雷達周圍的物體的高分辨率地圖。這項研究打破了雷達技術開發領域的長期瓶頸,該項技術于上月刊登在Nature Communications上。
眾所周知,雷達技術的設計初衷是應用在軍事領域,用于識別或者跟蹤空中的軍事目標。但是在自動駕駛發展勢頭蓬勃的今天,人們更多的是通過自動駕駛汽車領域的相關報道或者文獻中了解雷達。自動駕駛中的雷達們是自動駕駛關鍵的一環——外部環境感知,提供最基本的技術支持。自動駕駛汽車在感知道路障礙物、行人等不確定因素時,發揮了巨大的作用。
人們普遍認為,對距離的分辨能力,即區分兩個位置接近的目標的能力,與發射雷達信號的帶寬成反比。TAU的學者受光學相干斷層掃描(OCT)啟發,演示了另一種類型的測距系統,具有良好的距離分辨率,并且幾乎完全不受帶寬限制,與相同帶寬的標準相干雷達相比,它對目標的分辨能力甚至提高了一個數量級以上,實現不需要帶寬就能精確地創建高分辨地圖的技術手段。
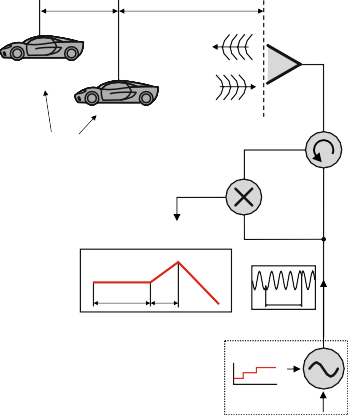
圖中顯示了三種不同的波:淺色最短,紫色居中,藍色最長。光束的寬度表示每個不同的波。對于淺色波,由于其相干長度較短,來自汽車的反射信號不再與信號的靜止發射部分相關。第一輛車反射的紫色波與發射信號相關,而第二輛車的反射則不相關,因此可以檢測到第一輛車的距離。藍色波具有最長的相干長度,與來自兩個物體的反射相關,也允許檢測第二輛車。雷達的相干長度(或時間)從最短掃到最長,掃描目標在視線內的位置。雷達系統的插圖(右上角)示意圖,是一個振蕩器和可控的相干時間τc傳播和混合反射的目標。相位切換N次和混頻器的輸出平均長度Nτc的窗口。通過掃描相干長度來重復這個過程,產生了作為相干長度函數的互相關系。
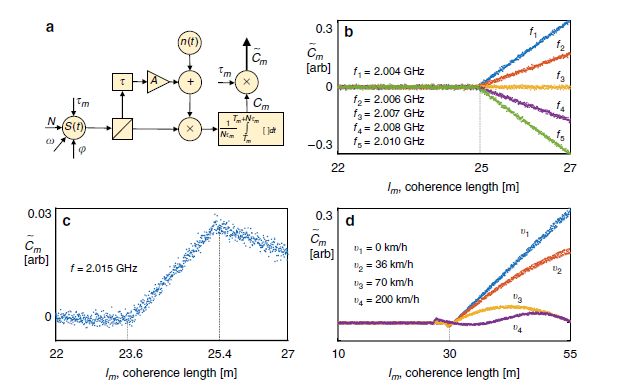
這是一張仿真結果及原理圖。連續波信號生成N階段跳躍隨機生產提供一個常數(可控)相干時間τm(相位切換事件之間的時間)。每個脈沖都有一個脈沖持續時間保持不變隨機相位(φn或向量φ)。信號從位于與延遲相關的距離的目標處反射,該距離由一個因子a衰減,并與附加白噪聲一起接收。接收機的輸出與傳輸信號的持續時間和平均傳輸時間Nτm(平均啟動信號的同時開始傳送) 混合在一起。集成的結果乘以τm相干時間。結果表示為互相關~Cm。對M個相干點(恒定相干長度)重復該過程。M和N定義了系統的性能(距離分辨率和距離精度)。
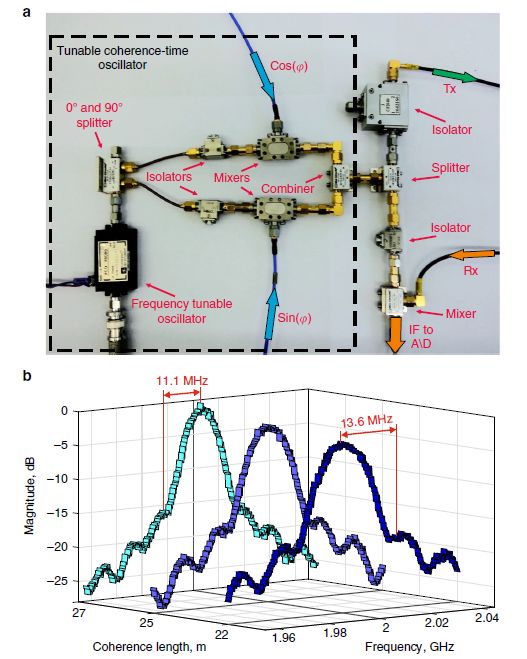
上圖是實驗實現和傳輸帶寬測量結果。a是部分相干振蕩器的實拍圖。載波被分成兩個象限,其中一個相位延遲90。每個臂乘以所需隨機相位輸出在t時刻的適當正弦或余弦項,將兩個臂組合在一起,顯示出具有所需相位跳變的單個載波、實現器和IQ矢量調制器。b圖測量雷達從相干長度22-27m掃頻時的半帶寬,這對應與27.2~22mhz的傳輸帶寬。隨著帶寬的增加,sinc函數的峰值降低,從而在整個掃描過程中保持傳輸功率。這些信號用于探索下圖所示的場景。
光學相干層析成像(OCT)把光源有限的相干長度變成了一種優勢,可以在生物組織內部進行亞毫米深分辨率的成像。通過掃過發射信號和反射信號之間的延遲,然后恢復相干函數的峰值,推導出被測散射目標的距離。雖然控制光源的相干長度仍然是一項技術挑戰,但自一個多世紀前石英諧振器和零差接收機發明以來,電磁頻譜的低頻部分(低于1THz)一直受益于相干光源。如今,大量價格低廉的電子設備的出現,使得人們可以前所未有地控制傳輸電磁場的形狀,以及精確地測量反射信號的相位。這些優點導致全相干源在我們今天所知的大多數雷達實現中占據主導地位。另一方面,在光學頻譜之下,部分相干源在很大程度上仍未得到探索。
為了實現高距離和多普勒分辨率,人們提出了多種相干載波調制方法,從而實現了不同的雷達實現,如連續傳輸的調頻連續波(FMCW)和具有非傳輸周期的編碼脈沖雷達。值得說明的是,本文介紹的“相干”一詞并不是指標準雷達中常用的積分方法,而是指發射波本身的性質。在這一點上,可能有人會問,為什么要費心改進開發良好的雷達系統?因為所有雷達信號都存在距離分辨率(區分兩個位置相近的目標的能力)和發射信號帶寬之間的聯系,這導致人們認為這是一種牢不可破的關系。此外,距離精度,即已知到單個目標的距離的確定性,往往與帶寬也有類似的負相關關系,這就迫使昂貴的高帶寬應用在對距離精度和距離分辨率要求很高的領域,比如近年來很火熱的自動駕駛行業。自動駕駛往往要求超過1ghz的帶寬才能實現高于一米的分辨率,這就存在一個問題,高帶寬意味著高價格,而自動駕駛商用進程中的最重要的一個問題就是控制價格成本,做消費者消費得起的自動駕駛汽車。
作為該論文的主要作者之一的Kozlov表示:“我們的概念在需要高范圍分辨率和精度的情況下提供解決方案,但其可用帶寬有限,例如自動駕駛汽車行業,光學成像和天文學”。Kozlov解釋說,“今天路上行駛的汽車并不多,所以幾乎沒有分配頻率的競爭。但未來會發生什么,每輛汽車都配備雷達,每個雷達都需要整個帶寬?到那時,我們會發現自己處于一種無線電交通堵塞狀態。我們的解決方案允許駕駛員在沒有任何沖突的情況下共享可用帶寬。”
-
雷達
+關注
關注
50文章
2903瀏覽量
117339 -
智能汽車
+關注
關注
30文章
2781瀏覽量
107150 -
自動駕駛
+關注
關注
783文章
13688瀏覽量
166157
原文標題:突破帶寬限制,自動駕駛雷達傳感器迎來技術革命
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
MEMS技術在自動駕駛汽車中的應用
FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
自動駕駛汽車如何識別障礙物
自動駕駛識別技術有哪些
自動駕駛汽車傳感器有哪些
XV7181BB 陀螺儀傳感器在自動駕駛設備中的應用

揭秘自動駕駛:未來汽車的感官革命,究竟需要哪些超級傳感器?
未來已來,多傳感器融合感知是自動駕駛破局的關鍵
探索自動駕駛傳感器仿真模型的可信度

虹科方案丨L2進階L3,數據采集如何助力自動駕駛





 工商網監
工商網監
評論