 工業電機驅動如何成功可靠地實現短路保護
工業電機驅動如何成功可靠地實現短路保護
工業電機驅動的整個市場趨勢是對更高效率以及可靠性和穩定性的要求不斷提高。功率半導體器件制造商不斷在導通損耗和開關時間上尋求突破。有關增加絕緣柵極雙極性晶體管(IGBT)導通損耗的一些權衡取舍是:更高的短路電流電平、更小的芯片尺寸,以及更低的熱容量和短路耐受時間。這凸顯了柵極驅動器電路以及過流檢測和保護功能的重要性。本文討論現代工業電機驅動中成功可靠地實現短路保護的問題,同時提供三相電機控制應用中隔離式柵極驅動器的實驗性示例。
工業環境中的短路
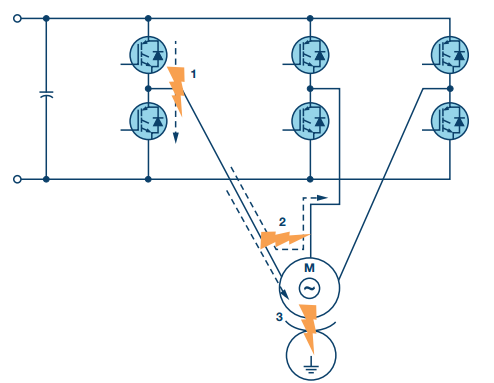
工業電機驅動器的工作環境相對惡劣,可能出現高溫、交流線路瞬變、機械過載、接線錯誤以及其它突發情況。其中有些事件可能會導致較大的過流流入電機驅動器的功率電路中。圖1顯示了三種典型的短路事件。
它們是:
1. 逆變器直通。這可能是由于不正確開啟其中一條逆變器橋臂的兩個IGBT所導致的,而這種情況又可能是因為遭受了電磁干擾或控制器故障。它也可能是因為臂上的其中一個IGBT磨損/故障導致的,而正常的IGBT保持開關動作。
2. 相對相短路。這可能是因為性能下降、溫度過高或過壓事件導致電機繞組之間發生絕緣擊穿所引起的。
3. 相線對地短路。這同樣可能是因為性能下降、溫度過高或過壓事件導致電機繞組和電機外殼之間發生絕緣擊穿所引起的。
一般而言,電機可在相對較長的時間內(毫秒到秒,具體取決于電機尺寸和類型)吸收極高的電流;然而,IGBT——工業電機驅動逆變器級的主要部分——短路耐受時間為微秒級。

圖1. 工業電機驅動中的典型短路事件
IGBT短路耐受能力
IGBT短路耐受時間與其跨導或增益以及IGBT芯片熱容量有關。更高的增益導致IGBT內的短路電流更高,因此顯然增益較低的IGBT具有較低的短路電平。然而,較高增益同樣會導致較低的通態導通損耗,因而必須作出權衡取舍。
IGBT技術的發展正在促成增加短路電流電平,但降低短路耐受時間這一趨勢。此外,技術的進步導致使用芯片尺寸更小,縮小了模塊尺寸,但降低了熱容量,以至耐受時間進一步縮短。另外,還與IGBT集電極-發射極電壓有很大關系,因而工業驅動趨向更高直流總線電壓電平的并行趨勢進一步縮減了短路耐受時間。過去,這一時間范圍是10 μs,但近年來的趨勢是在往5 μs3以及某些條件下低至1 μs方向發展。4 此外,不同器件的短路耐受時間也有較大的不同,因此對于IGBT保護電路而言,通常建議內建多于額定短路耐受時間的額外裕量。
IGBT過流保護
無論出于財產損失還是安全方面的考量,針對過流條件的IGBT保護都是系統可靠性的關鍵所在。IGBT并非是一種故障安全元件,它們若出現故障則可能導致直流總線電容爆炸,并使整個驅動出現故障。5 過流保護一般通過電流測量或去飽和檢測來實現。圖2顯示了這些技巧。對于電流測量而言,逆變器臂和相位輸出都需要諸如分流電阻等測量器件,以便應付直通故障和電機繞組故障。控制器和/或柵極驅動器中的快速執行跳變電路必須及時關斷IGBT,防止超出短路耐受時間。這種方法的最大好處是它要求在每個逆變器臂上各配備兩個測量器件,并配備一切相關的信號調理和隔離電路。只需在正直流總線線路和負直流總線線路上添加分流電阻即可緩解這種情況。然而,在很多情況下,驅動架構中要么存在臂分流電阻,要么存在相位分流電阻,以便為電流控制環路服務,并提供電機過流保護;它們同樣可能用于IGBT過流保護——前提是信號調理的響應時間足夠快,可以在要求的短路耐受時間內保護IGBT。

圖2. IGBT過流保護技術示例
去飽和檢測利用IGBT本身作為電流測量元件。原理圖中的二極管確保IGBT集電極-發射極電壓在導通期間僅受到檢測電路的監控;正常工作時,集電極-發射極電壓非常低(典型值為1 V至4 V)。
然而,如果發生短路事件,IGBT集電極電流上升到驅動IGBT退出飽和區并進入線性工作區的電平。這導致集電極-發射極電壓快速升高。上述正常電壓電平可用來表示存在短路,而去飽和跳變閾值電平通常在7 V至9 V區域內。重要的是,去飽和還可表示柵極-發射極電壓過低,且IGBT未完全驅動至飽和區。進行去飽和檢測部署時需仔細,以防誤觸發。這尤其可能發生在IGBT尚未完全進入飽和狀態時,從IGBT關斷狀態轉換到IGBT導通狀態期間。消隱時間通常在開啟信號和去飽和檢測激活時刻之間,以避免誤檢。通常還會加入電流源充電電容或RC濾波器,以便在檢測機制中產生短暫的時間常數,過濾噪聲拾取導致的濾波器雜散跳變。選擇這些濾波器元件時,需在噪聲抗擾度和IGBT短路耐受時間內作出反應這兩者之間進行權衡。
檢測到IGBT過流后,進一步的挑戰便是關閉處于不正常高電流電平狀態的IGBT。正常工作條件下,柵極驅動器設計為能夠盡可能快速地關閉IGBT,以便最大程度降低開關損耗。這是通過較低的驅動器阻抗和柵極驅動電阻來實現的。如果針對過流條件施加同樣的柵極關斷速率,則集電極-發射極的di/dt將會大很多,因為在較短的時間內電流變化較大。由于線焊和PCB走線雜散電感導致的集電極-發射極電路寄生電感可能會使較大的過壓電平瞬間到達IGBT(因為VLSTRAY = LSTRAY × di/dt)。因此,在去飽和事件發生期間,關斷IGBT時,提供阻抗較高的關斷路徑很重要,這樣可以降低di/dt以及一切具有潛在破壞性的過壓電平。除了系統故障導致的短路,瞬時逆變器直通同樣會發生在正常工作條件下。此時,IGBT導通要求IGBT驅動至飽和區域,在該區域中導通損耗最低。這通常意味著導通狀態時的柵極-發射極電壓大于12 V。IGBT關斷要求IGBT驅動至工作截止區域,以便在高端IGBT導通時成功阻隔兩端的反向高電壓。原則上講,可以通過使IGBT柵極-發射極電壓下降至0 V實現該目標。但是,必須考慮逆變器臂上低端晶體管導通時的副作用。導通時開關節點電壓的快速變化導致容性感應電流流過低端IGBT寄生密勒柵極-集電極電容(圖3中的CGC)。該電流流過低端柵極驅動器(圖3中的ZDRIVER)關斷阻抗,在低端IGBT柵極發射極端創造出一個瞬變電壓增加,如圖所示。如果該電壓上升至IGBT閾值電壓VTH以上,則會導致低端IGBT的短暫導通,從而形成瞬態逆變器臂直通——因為兩個IGBT都短暫導通。這一般不會破壞IGBT,但卻能增加功耗,影響可靠性。

圖3. 密勒感應逆變器直通
一般而言,有兩種方法可以解決逆變器IGBT的感應導通問題——使用雙極性電源和/或額外的米勒箝位。在柵極驅動器隔離端接受雙極性電源的能力為感應電壓瞬變提供了額外的裕量。例如,–7.5 V負電源軌表示需要大于8.5 V的感應電壓瞬變才能感應雜散導通。這足以防止雜散導通。另一種方法是在完成關斷轉換后的一段時間內降低柵極驅動器電路的關斷阻抗。這稱為米勒箝位電路。容性電流現在流經較低阻抗的電路,隨后降低電壓瞬變的幅度。針對導通與關斷采用非對稱柵極電阻,便可為開關速率控制提供額外的靈活性。所有這些柵極驅動器功能都對整個系統的可靠性與效率有正面影響。
實驗示例
實驗設置采用三相逆變器,該逆變器由交流市電通過半波整流器供電。雖然系統最高可采用800 V的直流總線電壓,但本例中的直流總線電壓為320 V。正常工作時,0.5 HP感應電機由開環V/Hz控制驅動。IGBT采用International Rectifier提供的1200 V、30 A IRG7PH46UDPBF。控制器采用ADI的ADSP-CM408F Cortex?-M4F混合信號處理器。使用隔離式Σ-Δ AD7403調制器進行相位電流測量,使用ADuM4135實現隔離式柵極驅動(它是一款磁性隔離式柵極驅動器產品,集成去飽和檢測、米勒箝位和其它IGBT保護功能)。
在電機相位之間,或在電機相位和負直流總線之間手動開關短路,進行短路測試。本例中未測試短路至地。控制器和電源板如圖5所示。它們均為ADI公司的ADSP-CM408F EZ-kit?6和EV-MCS-ISOINVEP-Z隔離式逆變器平臺。

圖4. 實驗設置
圖5. ADI隔離式逆變器平臺搭配全功能IGBT柵極驅動器
實驗硬件中,通過多種方法實現IGBT過流和短路保護。它們分別是:
* 直流總線電流檢測(逆變器直通故障)
* 電機相位電流檢測(電機繞組故障)
* 柵極驅動器去飽和檢測(所有故障)
對于直流總線電流檢測電路,必須加一個小型濾波器,避免誤觸發,因為直流總線電流由于潛在的高噪聲電流而斷續。采用具有3 μs時間常數的RC濾波器。檢測到過流后,其余有關IGBT關斷的延遲是通過運算放大器、比較器、信號隔離器、ADSP-CM408F中的跳變響應時間,以及柵極驅動器傳播延遲。這會額外增加0.4 μs,使得故障至關斷的總時間延遲為3.4 μs——遠低于很多IGBT的短路時間常數。
類似的時序同樣適用于采用AD7403以及ADSP-CM408F處理器上集成式過載檢測sinc濾波器的電機相位電流檢測。采用時間常數為3 μs左右的sinc濾波器可良好運作。8在這種情況下,其余系統延遲的原因僅會是跳變信號內部路由至PWM單元以及存在柵極驅動器傳播延遲,因為過載sinc濾波器是處理器的內部元件。連同電流檢測電路或快速數字濾波器的反應時間,無論使用何種方法,兩種情況下的ADuM4135超短傳播延遲對實現有效的快速過流保護非常重要。
圖6顯示了硬件跳變信號、PWM輸出信號和其中一個逆變器臂的上方IGBT實際柵極-發射極波形之間的延遲。圖中可以看到,IGBT開始關斷后的總延遲約為100 ns。

圖6. 過流關斷時序延遲(通道1:柵極-發射極電壓10 V/div;通道2:來自控制器的PWM信號5 V/div;通道3:低電平有效跳變信號5 V/div;100 ns/div)
柵極驅動器去飽和檢測比上文描述的過流檢測方法執行速度快得多,且對于限制短路電流所允許上升的上限很重要,從而提升了系統的整體穩定性,并超過了可以實現的水準,哪怕系統帶有快速過流保護功能。這顯示在圖7中。當發生故障時,電流快速上升——事實上,電流遠高于圖中所示,因為圖中以帶寬限制20 A電流探針進行測量,僅供參考。去飽和電壓達到9 V跳變電平,柵極驅動器開始關斷。顯然,短路的整個持續時間不足400 ns。電流的長尾表示下方IGBT反并聯二極管中的續流導致的感應電能。開啟時,去飽和電壓的初始增加是雜散去飽和檢測電動勢的一個例子,這是由于集電極-發射極電壓瞬態所導致。可以通過增加去飽和濾波器時間常數,從而增加額外的消隱時間而消除。

圖7. IGBT短路檢測

圖8. IGBT短路關斷
圖8顯示了IGBT上的集電極-發射極電壓。由于去飽和保護期間,關斷的阻抗較大,因此初始受控過沖約為320 VDC總線電壓以上80 V。電流在下游反并聯二極管中流動,而電路寄生實際上使得電壓過沖略高,最高約為420 V。

圖9. 開啟時的米勒箝位 通道1:柵極-發射極電壓5 V/div;通道2:來自控制器的PWM信號5 V/div;通道3:集電極-發射極電壓100 V/div;200 ns/div
圖9顯示了正常工作時,米勒箝位防止逆變器直通的價值。
小結
隨著IGBT的短路耐受時間下降至1 μs的水平,在極短的時間內檢測并關斷過流和短路正變得越來越重要。工業電機驅動的可靠性與IGBT保護電路有很大的關系。本文羅列了一些處理這個問題的方法,并提供了實驗結果,強調了穩定隔離式柵極驅動器IC (比如ADI公司的ADuM4135)的價值。
-
半導體
+關注
關注
334文章
26331瀏覽量
210016 -
電機驅動
+關注
關注
60文章
1165瀏覽量
86287 -
IGBT
+關注
關注
1256文章
3711瀏覽量
246961
原文標題:工業電機驅動如何成功可靠地實現短路保護?
文章出處:【微信號:wwygzxcpj,微信公眾號:電機技術及應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
工業電機驅動IGBT過流和短路保護的問題及處理方法
IGBT過流保護技術在工業電機驅動中的應用
工業電機驅動中的IGBT過流和短路保護
工業電機驅動中的IGBT過流和短路保護
工業電機驅動中的實現短路保護實現
工業電機驅動中的短路保護如何實現
【案例分享】工業電機驅動中的IGBT過流和短路保護
現代工業電機驅動如何實現短路保護
工業電機驅動中實現短路保護的問題

工業電機驅動中的IGBT過流和短路保護

現代工業電機驅動中如何可靠地實現短路保護的問題
工業電機驅動為什么需要IGBT





 工商網監
工商網監
評論