 細看自動化立體倉庫堆垛機的結構及工作原理
細看自動化立體倉庫堆垛機的結構及工作原理
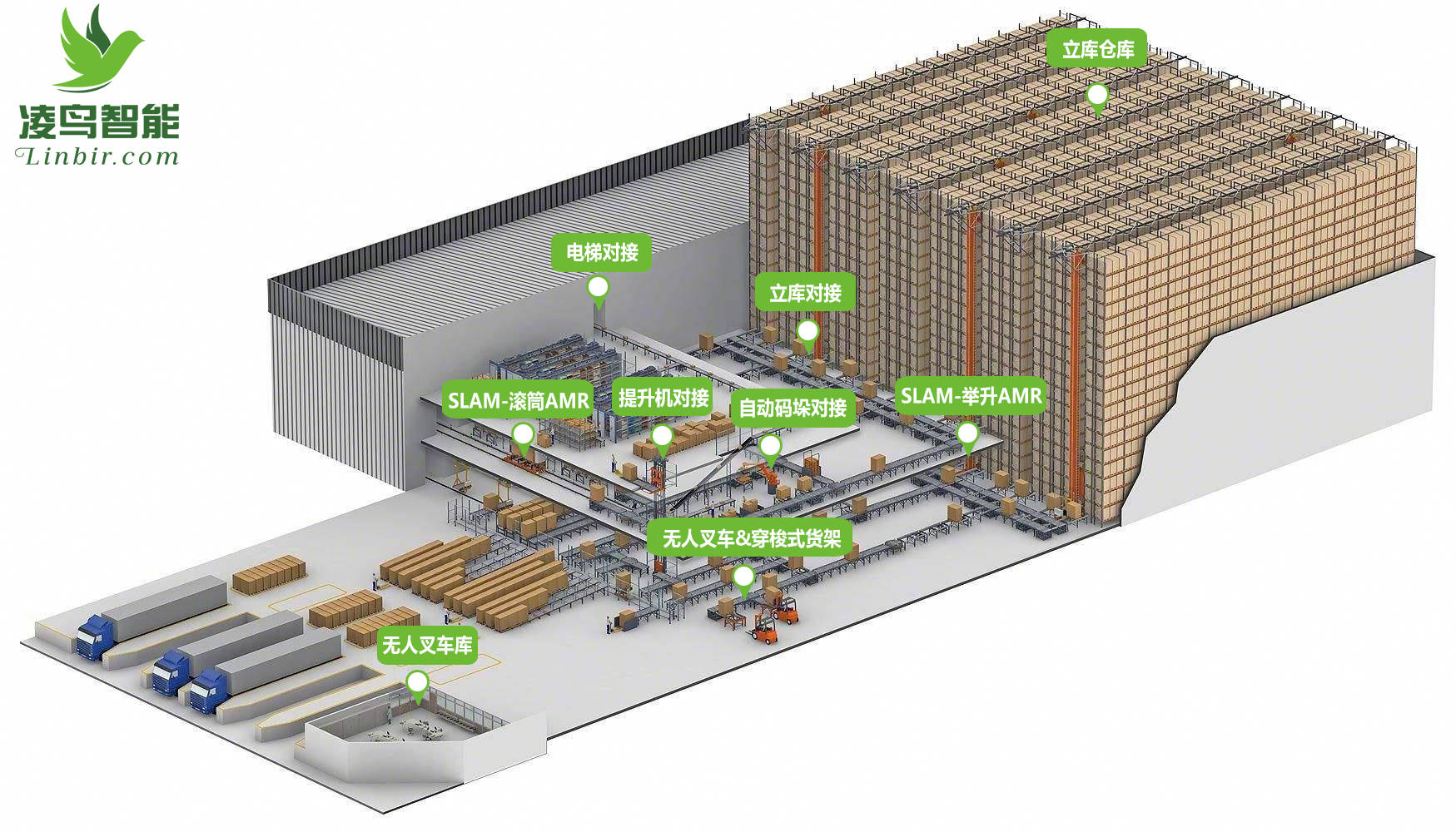
隨著物流業在我國的興起,現代工業的發展和日益激烈的市場競爭會對立體倉庫提出更高的要求,而堆垛機是整個自動化立體倉庫的核心部件。
它通過手動操作,半自動操作和全自動操作實現把貨物從一處搬運到另一處,擔負著出庫、入庫、盤點庫存等任務。自動化立體倉庫的發展就是以堆垛機的發展為主要標志的,目前巷道式堆垛機為主要發展方向。下面為大家講解自動化立體倉庫堆垛機的結構及工作原理。
自動化立體倉庫堆垛機的工作原理:
堆垛機由行走電機通過驅動軸帶動車輪在下導軌上做水平行走,由提升電機通過鋼絲繩帶動載貨臺做垂直升降運動,由載貨臺上的貨叉做伸縮運動。通過上述三維運動可將指定貨位的貨物取出或將貨物送入指定貨位。行走認址器用于測量堆垛機水平行走位置;提升認址器用于控制載貨臺升降位置;貨叉方向使用接近開關定位。通過光電識別,以及光通訊信號的轉化,實現計算機控制,也可實現堆垛機控制柜的手動和半自動控制。同時采用優化的調速方法,減少堆垛機減速及停機時的沖擊,大大縮短堆垛機的起動、停止的緩沖距離,提高了堆垛機的運行效率。
自動化立體倉庫堆垛機的結構:
堆垛機主要由上橫梁、下橫梁、載貨臺、立柱、水平運行機構、起升機構、貨叉機構、安全保護裝置、電控柜和電氣控制系統等幾大部分組成。
(1)主體結構
堆垛機主體結構主要由上橫梁、立柱、下橫梁和控制柜支座組成。上、下橫梁是由鋼板和型鋼焊接成箱形結構,截面性能好,下橫梁上兩側的運行輪軸孔在落地鏜銑床一次裝夾加工完成,確保了主、被動輪軸線的平行,從而提高了整機運行平穩性;立柱是由方鋼管制作,在方鋼管兩側一次焊接兩條扁鋼導軌,導軌表面進行硬化處理,耐磨性好。在焊接中采用了具有特殊裝置的自動焊接技術,有效克服了整體結構的變形;上橫梁焊于立柱之上,立柱與下橫梁通過法蘭定位,用高強度螺栓連接,整個主體結構具有重量輕、抗扭、抗彎、剛度大、強度高等特點。
(2)載貨臺
載貨臺是通過起升機構的動力牽引做上下垂直運動的部件,由垂直框架和水平框架焊接成的L形結構,垂直框架用于安裝起升導輪和一些安全保護裝置。水平框架采用無縫鋼管制成,完全能夠滿足載貨的要求。
(3)水平運行機構
水平運行機構是由動力驅動和主被動輪組組成,用于整個設備巷道方向的運行。
(4)起升機構
起升機構是由驅動電機、卷筒、滑動組和鋼絲繩組成,用于提升載貨臺做垂直運動。
(5)貨叉機構
貨叉伸縮機構是由動力驅動和上、中、下三叉組成的一個機構,用于垂直于巷道方向的存取貨物運動。下叉固定于載貨臺上,三叉之間通過鏈條傳動做直線差動式伸縮。
(6)導輪裝置
堆垛機共采用了上下水平導輪和起升導輪三組導輪裝置,上下水平導輪分別安裝在上下橫梁上,用于導向堆垛機沿巷道方向做水平運動。起升導輪安裝于載貨臺上,沿立柱導軌上下運動,導向載貨臺的垂直運動,同時通過導輪支撐荷重,并傳遞給主體結構。
正是因為各種新興技術的出現,必將推動立體倉庫朝著更加智能化、柔性化的方向發展,堆垛機的性能和效率也將得到進一步提高。
-
立體倉庫
+關注
關注
0文章
26瀏覽量
8558 -
工業物聯網
+關注
關注
25文章
2369瀏覽量
63846 -
智能物流
+關注
關注
4文章
311瀏覽量
22645
原文標題:細看自動化立體倉庫堆垛機的結構及工作原理
文章出處:【微信號:cqspkjrobot,微信公眾號:重慶機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
Agv小車能對接哪些自動化設備?最后一個你絕對想不到
解決方案 | 堆垛機新飛躍!明治傳感技術助力智慧物流高效運作

沃爾瑪斥資2億推進自動駕駛叉車項目,加速倉庫自動化
解析無人叉車在自動化立體庫的4大應用 看過最后一個 算我輸

自動化叉車是什么?有哪些分類?適用于什么場景?

伺服控制器的工作原理和基本結構
直流伺服系統的結構與工作原理
PID控制器在工業自動化中的應用
行業首個、規模最大的晶科能源智能立體倉庫在海寧基地正式投產
弧形導軌在自動化設備中的傳動原理

自動化碼垛機車間使用優勢
AGV在立體倉庫中的路徑規劃
全面解析***結構及工作原理
端子機的工作原理是什么?端子機使用前檢測要注意哪些?
基于數字化仿真技術的立體倉庫系統設計





 工商網監
工商網監
評論