 雙目視覺和激光傳感器對目標物體的三維重建技術概述總結
雙目視覺和激光傳感器對目標物體的三維重建技術概述總結
雙目視覺和激光傳感器對目標物體的三維重建,我們對該技術工作進行概述總結,讀懂這篇文章,應該就了解其中技術門道。
(一)背景和研究意義
在現代工業中,傳統的測量設備如三坐標測量機、卡尺、千分尺等, 因測量速度慢、效率低,已不能適應現代制造技術發展的需要。而計算機視覺檢測技術以其非接觸、快速、高精度、自動化程度高等諸多優點,在工業生產中得到了越來越廣泛的應用。已有的方法包括基于單攝像頭結合結構光的方法、雙目視覺方法、投影儀配合攝像機方法等。其中雙目視覺因其結構靈活、安裝方便、成本低而被廣泛采用。
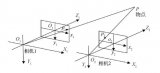
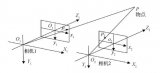
雙目視覺測量要解決的問題是如何通過兩維CCD圖像恢復出被測量的三維信息, 一般由以下兩個互逆的步驟組成:①根據三維空間信息及兩維圖像信息標定系統內外部參數;②根據攝像機參數標定結果及獲得的兩維圖像信息,進行三維測量、三維重建。目前的視覺測量一般是遵循先對攝像系統進行標定, 然后利用標定的參數進行視覺測量與三維重建這一基本思想進行的。在實際應用中會遇到諸如標定參數變化,照明視場噪聲, 被測表面光特性的影響等問題,使其測量精度難以滿足工業檢驗與測量的要求。
其中線結構激光掃描技術具有非接觸式、光條圖像易于處理、測速快、成本低、操作方便靈活等特點,在視覺測量、工藝檢測等領域具有廣闊的應用前景。該技術中對系統的標定是測量技術實現的關鍵環節,目前,根據線結構光傳感系統的測量模型,提出了許多標定方法,如三維立體靶標標定法,齒形靶標定法以及拉絲標定法等。這些標定方法都要求靶標具有很高的精度,成本比較高,而且標定過程繁瑣;目前操作簡單、低成本的標定方法成為研究熱點。攝像機標定與立體匹配是雙目立體視覺系統中最重要也是最困難的問題。隨著攝影測量和計算機視覺理論的發展,許多學者對攝像機標定技術進行了深入研究,現已發展的比較成熟;也有許多學者對立體匹配進行了大量的研究。提出了一種基于雙目立體視覺的激光三維測量技術,采用了張正友平面模板標定法,系統標定不需昂貴的精制標定塊;同時,利用標定結果對圖像進行校正,并結合線結構激光條紋進行匹配點搜索,大大降低了雙目立體視覺中立體匹配的難度。
(二)國內外研究現狀和發展趨勢
三維物體的距離感知是計算機視覺的主要研究任務。目前,獲取距離信息的方法和技術很多。根據測量原理的不同,三維測量的方法可以分為光學測量、超聲波測量以及電磁測量等。光學測量按照其測量過程所采用的照明方式不同,又可以分為主動測量和被動測量。主動測量需要專門的光源裝置照明目標物體,根據被照物體表面反射特性獲取目標的三維信息。具有代表性的主動測距方法有結構光法、三角測量法等,比如常用的激光掃描式的視覺系統就是基于三角測量原理。被動視覺則不需要附加光源,利用場景在自然光照下的二維圖像來重建物體的三維信息。
激光結構光由于波長單一,抗電磁干擾能力強,檢測精度高等優點,廣泛應用于物體檢測與跟蹤。作為主動視覺測量技術,其工作原理是:將激光發射器產生的激光投射到物體表面,CCD傳感器接收與光軸成一定角度的經由物體表面形狀形成的反射光,通過三角測量原理,可以得到物體表面的三維坐標。如德國Scout公司開發的一種多條紋激光傳感器,能同時實現焊接高度的對中跟蹤以及姿態控制;加拿大的賽融公司專注于激光視覺系統研發,生產的多功能激光傳感器系統,把定位、跟蹤、裝備檢測以及自適應參數控制集于一體,能夠實現高速的物體跟蹤,是結構光傳感器先進水平的代表。基于結構光雙目立體視覺的路徑規劃原理是:將激光雙目視覺傳感器安裝在機器人的末端,逐點測量物體中心坐標,建立測量軌跡的數據庫作為運動路徑。眼在手上的結構光雙目立體視覺測量系統由安裝在機器人末端的激光器、兩臺CCD攝像機構成測量系統。激光器發出的光束在焊縫中形成條紋。兩臺攝像機同步采集該條紋,結合攝像機標定參數對激光條紋的特征點進行處理獲得三維空間坐標。張廣軍、賀俊吉等人提出基于神經網絡的結構光立體視覺測量模型,該模型應用神經網絡的泛化能力,消除了視覺模型誤差、光學誤差因素對測量系統的測量精度影響。王國榮、肖心遠等人基于激光結構光視覺系統獲取激光圖像,在二維的曲線焊縫跟蹤中獲得良好效果。徐德等人對基于位置的機器人視覺伺服控制進行了研究,將結構光視覺系統配置在機器人末端執行器上,構成手眼系統,實現了機器人位置姿態和圖像采集的同步,完成測量物體的自動識別和實時跟蹤。
20世紀60年代,美國麻省理工學院的Robert把二維圖像分析推廣到三維景物,標志著立體視覺技術誕生。隨后,70年代末美國麻省理工學院的Marr教授提出來的計算機視覺理論框架則奠定了立體視覺的發展基礎。隨著雙目立體視覺技術的不斷發展和檢測精度的不斷提高,雙目立體視覺被廣泛應用。例如在生產中,對工業生產線的結構、照明等因素進行嚴格的控制,應用雙目立體視覺技術可以進行工業生產和裝配線的檢測,裝配零件的識別與定位、產品外形輪廓
檢驗、表面缺陷檢驗等;兩個攝像機同步獲取某一時刻場景中某一視點的兩幅圖像,組成圖像序列對,應用雙目視覺技術恢復場景的三維信息,并利用場景的三維信息識別特定目標、判斷障礙物、道路規劃等,實現與周圍環境的自主交互。日本東京大學為機器人加載雙目立體視覺系統實現路徑規劃和障礙物探測。該機器人動態導航系統首先根據攝像機拍攝的圖像識別出障礙物和地面,然后應用雙目視覺測量原理把二維平面坐標系轉換到世界坐標系,這樣就形成了機器人周圍環境地圖,據此地圖進行實時機器人路徑規劃和障礙物檢測。北京航空航天大學對基于雙目視覺方法原理的坐標測量機的測距誤差進行了較為系統的分析,主要對攝像機坐標系與坐標測量機坐標系之間的不正交所引起的測距誤差、坐標測量機本身的機構誤差引起的測距誤差以及攝像機成像面上像元的量化誤差引起的測距誤差三種誤差因素進行了討論。中國空氣動力研究中心的何海、湯春林等人采用雙目立體視覺系統,通過對風洞試驗模型上兩個以上的圓或三角錐特征點提取,實現了模型側滑角的空間非接觸實時精確測量。
(三)應用
雙目立體視覺因為有快速,準確,靈活等特點,被廣泛的應用于醫療,工業,人工智能等多個領域,尤其當工作的環境惡劣、條件艱苦(例如:高山地區的電力線監測,建筑施工工地的墻面抹灰,外太空導航等),或者要求長時間、穩定性強的工作(國防安全系統,醫學成像等),雙目立體視覺系統顯現出來了無法比擬的優越性。雙目立體視覺應用的部分領域包括:
1、高山地區的電力線監測
由于高壓電力線長期處于高負載工作條件下,因此需要定期檢測其電力線表面是否出現破損,結冰等情況,常規的監測包括人力監測和飛機高空監測,然而在環境惡劣的情況下,人力監測危險大、效率低。利用搭載雙目立體視覺系統的無人機能夠很好的完成任務,不僅能夠快速實時的監測出電力線表面平整度,同時解決了人力工作和飛機高空檢測帶來的高成本,高危險,低效率的問題。
2、房屋建造抹墻機器人
常規房屋建造的過程中,對于墻面的水泥通常采用人力抹墻的方式來解決,這樣做的缺點是,墻面抹的不均勻、厚度不一,無法達到工業級的要求,同時人力成本過高,速度較慢。發明一款抹墻機器人,該機器人能夠自動抹墻,同時采用雙目視覺系統監測墻面的平整度以及厚度,對于墻面抹的不平整的區域,及時采取措施,利用機器視覺分析檢測代替人工檢測,準確度得到了極大的提高,同時降低了人力成本。
3、衛星遙感監測圖像分析
高空遙感監測圖片通常是有三種方式:航空衛星圖片、氣象衛星圖片和地質地形衛星圖片。對于衛星圖片,如果僅僅只是采取人眼分析根本無法取得準確的結果,利用雙目立體視覺系統,能夠快速準確的計算出距離信息,從而重構出三維形狀,將圖片還原成為真實的立體場景,幫助相關工作者的后續分析工作。
4、醫學成像分析
醫學工作者通常需要對相關的圖像進行定量分析以判斷病情,常規的方法無法準確快速的做到這一點,利用雙目立體視覺,可以定量的檢測出影像部分的深度信息,從而能夠用準確的數值來輔助判斷病情。
5、安全檢測系統
公安機關經常會通過犯罪分子留下的監控照片來對犯罪分子的容貌進行估計并搜索,然而普通的監控照片通常只是平面的照片,對于犯罪分子的面部全貌并不能夠準確的估計。采用雙目立體視覺,可以通過左右監控圖片恢復出犯罪分子的面部全貌,從而進行準確的人物面貌搜索。
6、其他
雙目立體視覺越來越多的被應用在我們的平常生活當中,例如,虛擬現實構造空間配合虛擬現實技術,雙目立體視覺可以恢復出難以示眾的物品,例如,文物,墨寶等高價值易破損的物品。從而可以建造出虛擬文化館。
(四)研究內容
雙目和激光傳感器構成的測量系統對被測物體進行三維重建,測量系統由2個攝像機和激光投射器構成,將激光投射到被測物體表面。攝像機采集帶有激光的被測圖像,提取光條中心,再根據雙目立體視覺參數,利用三角測量法原理在立體視覺模型下獲取被測物特征點的三維坐標。
整個物體的三維重建
為實現工業中汽車、飛機、骨骼和模具外形等物體的三維重建,介紹了基于激光線掃描的雙目立體視覺三維測量系統。2個攝像機同時攝取一個掃描激光光條圖像,經過圖像預處理、光條特征點提取、圖像匹配,利用視差計算出光條上所有點的坐標值,即光條處物體的三維信息。通過坐標系之間的轉換把各光條統一到同一世界坐標系下,得到整個物體的三維重建。三維激光掃描測量系統如下圖所示,硬件部分包括雙CCD攝像機,半導體激光器,電控平移臺以及步進電機控制箱。
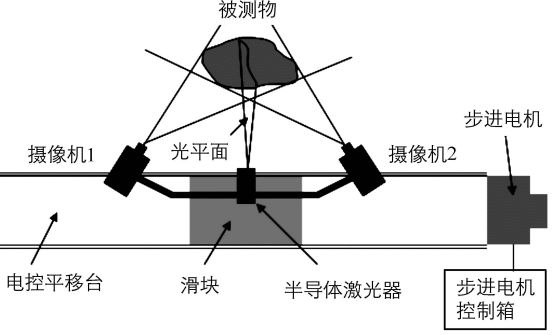
測量系統結構組成
系統中用到精密電控平移臺,它通過步進電機驅動,實現位移調整自動化。根據平移臺控制箱設定的位移量和速度,可以控制滑塊在導軌上滑動的距離及速度,即控制物體掃描的范圍及密度。雙攝像機與半導體激光器組成三維視覺傳感器。控制箱控制步進電機使平移臺在導軌上滑動,帶動三維傳感器系統對物體掃描拍攝,就可以三維重建出整個物體的三維點云數據。
-
傳感器
+關注
關注
2548文章
50678瀏覽量
752019 -
激光
+關注
關注
19文章
3122瀏覽量
64363
原文標題:雙目視覺和激光傳感器對目標物體的三維重建技術
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
CASAIM與邁普醫學達成合作,三維掃描技術助力醫療輔具實現高精度三維建模和偏差比對
留形科技借助NVIDIA平臺提供高效精確的三維重建解決方案
lidar傳感器和ryyb哪個好
基于大模型的仿真系統研究一——三維重建大模型

泰來三維 工廠三維掃描建模技術服務

泰來三維 三維激光掃描結合BIM在工廠掃描建模中的優勢
泰來三維|三維激光掃描技術在古建筑保護中的應用

激光距離選通三維成像技術研究進展綜述
工業上常見的高精度主動式重建算法
三維視覺測量技術:被動視覺測量和主動視覺測量
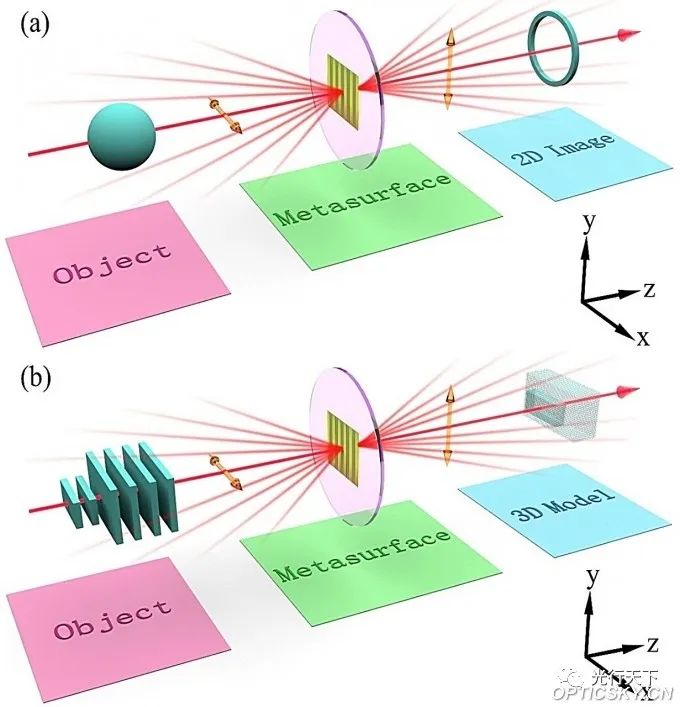
基于光學計算超表面的全光學目標識別和三維重建技術
基于深度學習的三維重建技術






 工商網監
工商網監
評論