 機器視覺的圖像二值化詳細分析
機器視覺的圖像二值化詳細分析
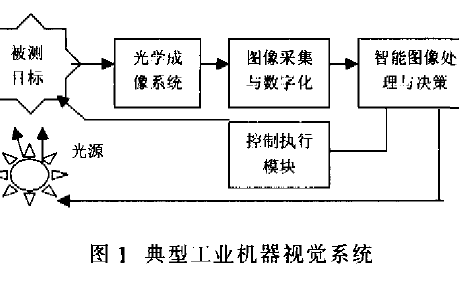
傳統的機器視覺通常包括兩個步驟——預處理和物體檢測。而溝通二者的橋梁則是圖像分割(Image Segmentation)[1]。圖像分割通過簡化或改變圖像的表示形式,使得圖像更易于分析。
舉個例子,食品加工廠新進了一批肉雞,想通過視覺檢測其美味程度。機器在預處理優化完圖像之后,要先把圖像中的雞肉和背景分開,并對感興趣的區域單獨進行分析,才能做出快速準確的判斷。
食品加工廠的視覺處理
然而,圖像分割對愚蠢的AI來說并不容易。聰明的人類一眼就能看出下圖中哪些東西能吃、哪些不能吃。但計算機要把這些東西分開卻得花費一番功夫。
原圖
圖像分割結果
最簡單的圖像分割方法是二值化(Binarization)。二值圖像每個像素只有兩種取值:要么純黑,要么純白。
彩色圖、灰度圖、二值圖對比
由于二值圖像數據足夠簡單,許多視覺算法都依賴二值圖像。通過二值圖像,能更好地分析物體的形狀和輪廓。二值圖像也常常用作原始圖像的掩模(又稱遮罩、蒙版,Mask):它就像一張部分鏤空的紙,把我們不感興趣的區域遮掉。進行二值化有多種方式,其中最常用的就是采用閾值法(Thresholding)進行二值化。
在計算機視覺里,一般用矩陣來表示圖像。也就是說,無論你的圖片看上去多么好吃,對計算機來說都不過是個矩陣而已。
在這個矩陣里,每一個像素就是矩陣中的一個元素。在三通道的彩色圖像中,這個元素是由三個數字組成的元組。
彩色三通道圖像
而對于單通道的灰度圖像來說,這個元素就是一個數字。這個數字代表了圖像在這個點的亮度,數字越大像素點也就越亮,在常見的八位單通道色彩空間中,0代表全黑,255代表全白。
單通道的灰度圖
閾值法是指選取一個數字,大于它就視為全白,小于它就視為全黑。就像教室里的燈管開關,我們輕輕地推動它,如果突然間超過了某個閾值,燈就啪的一聲亮了。
根據閾值選取方式的不同,可以分為全局閾值和局部閾值。
全局閾值
Global Method
全局閾值,指的是對整個圖像中的每一個像素都選用相同的閾值。我們可以在Photoshop的圖像-調整-閾值里體驗這一操作:
Photoshop里的閾值
可以看到閾值色階從1到255的移動過程中,圖像變黑的區域越來越多。當閾值數字在某個特定范圍內的時候,紅米腸的輪廓清晰可辨。
正確的二值化使紅米腸輪廓清晰可辨
在生產線環境下,光照是已知的,常常會設定一個固定的數字來作為全局閾值。但是在室外或者機器人比賽中,光照條件往往更加復雜*。
RoboMaster賽場的絢麗燈光
*此圖采用了夸張手法,RoboMaster是個很正規的比賽,絕對不會在比賽的時候這么難為大家的。
同樣是奧利奧冰激凌,在白天和晚上,攝像頭看到的畫面可能不太一樣,常數閾值無法同時適應這兩種情況。
明暗不同的畫面
對于畫面比較暗的晚上,我們需要一個比較低的閾值,比如說設定閾值為50,它在晚上能很清楚地把黑白兩種顏色分開,但是到了白天就是一片白(左邊);如果我們把閾值設置得比較高,比如說172,在白天能順利分割,但在晚上就是一片黑(右邊)。我們需要能夠適應復雜環境的算法。
左邊閾值=50,右邊閾值=172
其實,稍作分析我們可以發現,這張圖像中的顏色差異還是比較明顯的,只有深淺兩種顏色。因此,無論是在白天還是黑夜,它的色階直方圖都應該是兩個明顯的波峰,分別代表深色和淺色的區域。只是色階直方圖在白天會整體向右偏移,而在夜晚整體向左偏移。
圖像的色階直方圖
如果選擇兩個波峰之間的波谷作為閾值,就能輕松地把這兩類像素分開。但是圖像的直方圖往往是不連續的,有非常多尖峰和抖動,要找到準確的極值點十分困難。
日本工程師大津展之為這個波谷找到了一個合適的數學表達,并于1979年發表[2]。這個二值化方法稱為大津算法(Otsu’s method)。大津算法類似于一維Fisher判別分析的離散化模擬。通過窮舉法找到一個閾值數字,把這些像素切成兩類,使得這兩類像素的亮度的類內方差最小。類內方差指的是兩類像素的方差的加權和,這里權指的是這類像素點數量占整個圖像像素點數量的比值。
也許你的畫面不會只有兩坨差異較大的顏色,比如這款雪糕的就有三個尖峰。
三色雪糕(取雪糕部位的直方圖)
這時候,只需對大津算法稍加擴展也可以完成。對大津算法的多級推廣成為多大津算法(multi Otsu method)[3]。
局部閾值*
Local Method
*又稱自適應閾值,Adaptive Thresholding
比賽中常常會有聚光燈照在一個特定區域,產生局部受光、局部不受光的畫面。
局部受光的圖像
對于局部受光的圖像進行全局閾值,可能會出現“無論設置什么閾值參數,都無法滿足全圖要求”的尷尬。比如上面這幅圖像,直接進行全局閾值時,左上半邊的壽司全都顯露出來時,右下半邊還是一片黑色。
局部受光圖像的全局閾值處理
這個時候我們就要用到局部閾值來處理了。其實,人的眼睛也是自帶了這一步操作的。我們判定一個東西顏色深淺,往往會受到物體周邊的顏色影響,這也就是為什么黑人的牙齒看上去更白。
局部閾值法假定圖像在一定區域內受到的光照比較接近。它用一個滑窗掃描圖像,并取滑窗中心點亮度與滑窗內其他區域(稱為鄰域, neighborhood area)的亮度進行比較。如果中心點亮度高于鄰域亮度*,則將中心點標記為白色,否則標記為黑色。
局部閾值的滑窗
*這里提到的是局部閾值的基本方法,對于實際使用中常見的其他局部閾值方法,請參閱Chow-Kaneko自適應閾值法[4]。
局部閾值的應用非常廣泛,特別是對白紙黑字的處理非常有效。光學字符識別(OCR)和二維碼掃描的算法中,很多都用了局部閾值操作。
比如下面這張二維碼就是一張典型的局部受光圖像:
掃掃看,局部受光的二維碼
如果對這張圖片采用全局閾值(例如下圖采用大津算法進行分割),是無論如何都無法正確分割的。
全局方法不能處理局部受光圖像
而采用局部閾值方法就能很好地分割圖像。從圖片里可以明顯觀察到,局部閾值方法對于一大片干凈區域的細節比較敏感,所以紙面上多出了很多我們原本注意不到的斑點。
局部方法分割二維碼
◆◆◆
實際運用中,我們要根據需求選擇不同的二值化方法,沒有哪個方法是絕對完美的。
例如,在識別敵方機器人時,由于裝甲片燈條是自發光物體,受環境光影響較小,為了提高程序運行效率,我們采用固定數字作為全局閾值:
基地自動反擊
在能量機關的識別中,由于能量機關只有黑白兩種顏色,我們采用了大津算法及其多種變體:
大能量機關各區域的二值圖
而在空中機器人讀取基地區二維碼的時候又用到了局部閾值方法:
空中機器人識別基地
今天所講的內容只是圖像分割的冰山一角,作為視覺領域最古老的問題之一,時至今日仍有非常多圖像分割的新算法被提出。
除了基于閾值的圖像分割方法外,常用的分割方法還可以基于邊緣(如Yanowitz-Bruckstein自適應閾值方法[5])、區域(如區域生長算法[6])等,它們在衛星圖像處理、交通控制系統、工業生產監控、醫療影像等領域發揮著巨大的作用。
腦部組織圖像分割
-
機器視覺
+關注
關注
161文章
4348瀏覽量
120134 -
AI
+關注
關注
87文章
30239瀏覽量
268475 -
圖像分割
+關注
關注
4文章
182瀏覽量
17981
原文標題:視覺入門之圖像二值化:你說的黑不是黑,你說的白是什么白?
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
DVI接口詳細分析
詳細分析stm32f10x.h
詳細分析了VTIM和VMIN的功能

機器視覺的關鍵技術與應用實例詳細分析





 工商網監
工商網監
評論