 路基自動駕駛的內涵與技術路線
路基自動駕駛的內涵與技術路線
近日,第六屆國際智能網聯汽車技術年會(CICV2019)在北京亦莊的亦創國際會展中心舉辦。會議期間,中國交建智能交通研發中心副主任朱弘戈博士針對路基自動駕駛的內涵與技術路線進行了分享。(本文根據分享內容整理)
01
引言
近年來自動駕駛技術迅猛發展。目前,高級別自動駕駛解決方案基本采用“感知-決策-執行”鏈條。眾多知名企業對于感知的解決方案不盡相同,但無論類似特斯拉的視頻方案還是像Waymo的激光雷達方案,這些單車感知方案均存在感知距離有限、遮擋性盲區等問題。換言之,人工駕駛存在的問題單車自動駕駛解決方案依然存在,單車智能技術路線存在的問題逐漸暴露,主要存在的問題有:
1. 無法全面重現行駛環境,特別是盲區問題;
2. 復雜場景下算法準確率低,與人的判斷差距很大;
3. 單車制造成本居高不下,難于產業化發展;
4. 道路資源利用率低;
5. 特定場景缺乏組織調度,難于實現自協調。
因此,自動駕駛技術的發展逐漸從單車智能走向車路協同。交通運輸部高度重視自動駕駛和車路協同等前瞻性技術的發展和應用,提出“以智慧交通建設為載體,按照車路協同發展的技術路徑,積極推進自動駕駛的發展”。針對自動駕駛、車路協同、新一代交通控制網等方面,部署開展了大量的研究和開發工作。力求形成技術研發、產業示范、標準支撐、良性發展格局。
02
內涵
路基自動駕駛是指基于道路的車路協同式自動駕駛。根據道路和車輛的智能化水平劃分為不同的發展階段,實現車輛的自動駕駛技術與道路智能化技術協同發展,最終形成新一代交通控制與運行系統,實現交通運輸轉型升級。

路基自動駕駛是以道路智能化技術(Intelligent Road Technology) 、車輛自動駕駛技術(Autonomous Driving Technology) 、路運一體技術(integrated control and operation technology of road and transportation) 為核心,以運行保障體系(Operation guarantee system) 為基礎,實現不同業務場景下的自動駕駛。

03
框架
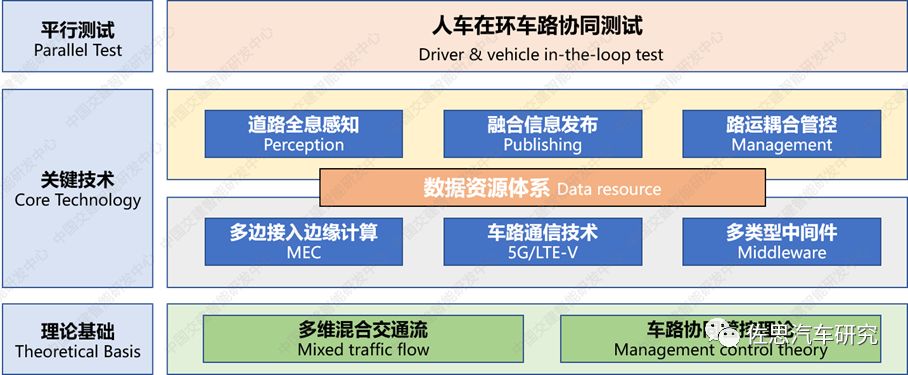
路基自動駕駛的體系如圖所示,多維混合交通流和柔性專用車道管理是路基自動駕駛的理論基礎。MEC(多邊接入邊緣計算)、5G/LTE-V(車路通信技術)、 Middleware(多類型中間件)構成了其關鍵技術的通用技術骨架。道路全息感知技術、多維融合信息發布技術和路運耦合管控技術組成了應用技術框架。人車在環車路協同測試是必要的測試驗證手段。綜上,形成完整的路基自動駕駛的技術框架。
道路全息感知與智能發布
路側感知和車側感知相互融合可以形成綜合交通環境感知體系,能夠解決單車自動駕駛的視覺盲區問題,同時使自動駕駛車輛擁有了超視覺感知功能。
路側感知即道路全息感知重點工作在于兩個方面:一是采用更加多樣化的感知手段,二是實現多源時空數據的融合;進而形成道路全息感知體系。
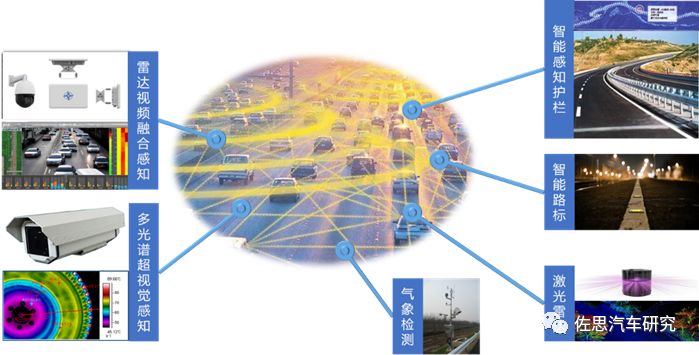
新技術的應用帶來感知手段的升級,例如雷達視頻融合感知、多光譜超視覺感知、激光雷達等。隨著感知手段的增多,對于多源時空數據的融合就更加關鍵。數據融合分為:數據層融合、特征層融合和決策層融合。道路多源時空數據應該是特征層融合。
在路基自動駕駛技術體系中,路側的多維融合信息發布技術是不可或缺的關鍵技術之一。多維,是信息發布的機制和對象兩個維度相互疊加,如圖所示。

在以無人駕駛為發展目標的技術演進過程中,信息應該是經過梳理,逐漸分化為駕駛人接受的信息和車輛控制系統接受的信息,另一方面,從信息的推送機制上,應該分為區域廣播信息和精準推送的個性化服務。
不同的信息在多維融合信息發布體系中就有不同的實現途徑,例如:受天氣影響的路面的性能,將會被區域廣播至附近行駛的車輛的控制系統;特定車前方障礙物信息被精準推送至車輛的控制系統;行駛路徑周邊服務信息會被精準地推送給駕駛人。
路運耦合管控技術
路運耦合管控技術旨在通過先進的技術手段將道路和營運車輛進行綜合管控。中國交建智能交通研發中心在充分調研國內外技術發展路徑的基礎上結合中國交建在智能交通領域的產業發展路線,認為路運一體的發展進程分為三個發展階段。這三個階段分別是:“傳統業務組合”階段、“路運管控服務的深度耦合”階段、“路運一體化協同優化”階段。
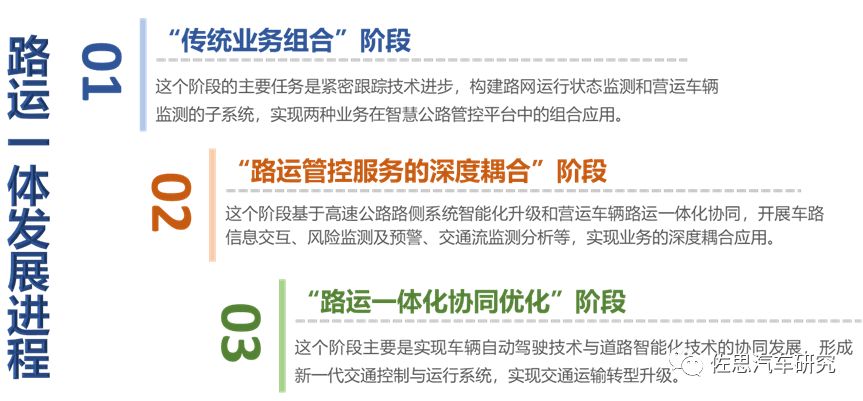
這三個階段分別是車和路的弱耦合、中等耦合、強耦合階段。在不同的階段需要技術攻關的方向不盡相同。
“路運管控服務的深度耦合”階段處于車路通信逐漸建立,車路協同技術路徑摸索中前進的階段。應該重點探索不同車輛在不同道路場景下的車路協同需求。“路運一體化協同優化”階段,則是已經實現了車路協同技術的基礎應用,網聯車具有一定密度,自動駕駛蓬勃發展。此時,可以探討通過車路互動實現交通控制,實現車側路側的協同決策。研發中心提出了幾個重點攻關方向,例如:通過網聯車實現整個道路交通狀態的感知;利用網聯車的速度引導,實現運輸通道重點路段的交通流控制,使其更加平穩高效;開展路基自動駕駛的落地應用。
人車在環車路協同測試
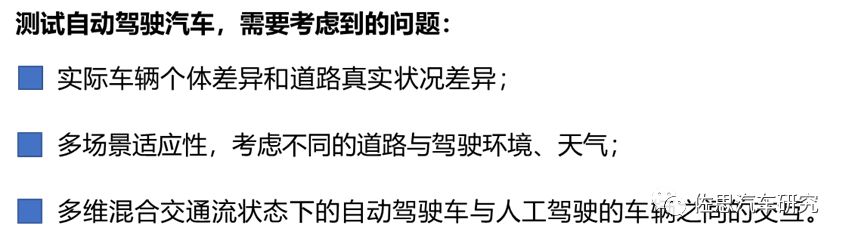
路基自動駕駛技術的實際應用落地,離不開最重要的環節——測試。目前的自動駕駛算法需要大量的數據進行訓練,絕大部分廠家在路測的同時結合仿真測試以尋求最短時間內得到最優結果。全國各地紛紛建設智能網聯汽車測試基地,很多城市也都出臺了相應的開放道路測試條例。但是封閉的測試場地沒有真實的道路環境,開放的測試區域又往往都是交通量小、交通場景簡單的區域。測試多維混合流條件下的車輛的系統穩定性和行駛安全性是十分困難的。
人車在環車路協同測試系統,利用真實數據在虛擬環境中建立對應的仿真測試環境,進行測試和評價。通過實際地圖數據搭建仿真環境中的測試路網,根據實測的交通檢測器數據在仿真環境中還原真實交通狀態,將控制算法寫入虛擬控制中心內,通過通信模塊實時獲取測試車輛數據,即可實現控制算法的測試。

04
應用
多維混合交通流將長期存在
交通技術一定要首先明確交通的組成,要深入剖析該技術的應用背景,才能夠判斷理論技術與實際應用的匹配程度。隨著技術的發展,汽車將由人工駕駛&非網聯階段轉變為無人駕駛&網聯階段。但是技術演進逐漸分化為不同路線,部分車輛向網聯化遷移,另一部分向無人駕駛遷移。因此,多維混合交通流將長期存在。

在混合交通中,由于不同車輛的動力特性,行駛速度,安全需求等特點不同,造成了極其復雜的交通環境。多維混合交通流的運行特性與單一車流存在較大的差異。
專用車道管理是多維混合交通流階段的必由之路
專用車道管理能夠從時間、空間的不同維度進行路權劃分,保證部分車輛的優先通行權,目前典型應用常見于公交車專用道、HOV專用車道、有軌電車專用道、擁堵區車道劃分等領域。但是在車路協同的技術背景下,隨著技術的不斷發展,專用車道的管理由時間空間靜態劃分轉變成為柔性動態劃分成為可能。
柔性車道管理技術是一種動態的專用道管理技術。這種技術摒棄了傳統環境下的剛性的管理,而是基于車路協同的環境充分挖掘道路的利用空間,用柔性的管理平衡系統最優和用戶最優兩種選擇。
柔性動態的管理手段有清空距離劃分、時段劃分、應急狀態劃分。采用柔性專用道管理技術可以
1.提高專用道時空資源利用率
2.實現特殊車輛快速通行
3.保障特殊車輛行程時間穩定性
05
結語
隨著路基自動駕駛技術的逐漸推廣,應急管理、交通事件管理、惡劣天氣、施工占道等領域都會產生變革。運行保障措施得到進一步升級。例如,利用道路全息感知技術,第一時間感知交通事件,判斷類型和嚴重程度,協同規劃決策,讓救援車輛以最快速度到達現場,實現快速精準救援。
基于運行保障體系,面向應用業務場景,應用路基自動駕駛技術,一定可以實現交通運輸行業的全面升級,提升運輸效率、降低運輸成本、保障運營安全。中國交建智能交通研發中心將繼續深入研究和攻關各項關鍵技術,積極與行業內伙伴誠摯合作,共同推進新一代智能交通運輸系統的發展。
-
傳感器
+關注
關注
2548文章
50728瀏覽量
752117 -
自動駕駛
+關注
關注
783文章
13693瀏覽量
166163 -
智慧交通
+關注
關注
5文章
693瀏覽量
26897 -
MEC
+關注
關注
0文章
116瀏覽量
19504
原文標題:路基自動駕駛的內涵與技術路線
文章出處:【微信號:zuosiqiche,微信公眾號:佐思汽車研究】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
自動駕駛汽車安全嗎?


自動駕駛技術的典型應用 自動駕駛技術涉及到哪些技術
FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
自動駕駛識別技術有哪些
自動駕駛的傳感器技術介紹


未來已來,多傳感器融合感知是自動駕駛破局的關鍵
發展新質生產力,百度蘿卜快跑開啟大興機場的自動駕駛接駁路線

自動駕駛發展問題及解決方案淺析
華為自動駕駛技術怎么樣?
自動駕駛下半場競爭的關鍵技術






 工商網監
工商網監
評論