 EtherCAT I/O 馬達控制 機器人從站控制器新選擇——AX58100
EtherCAT I/O 馬達控制 機器人從站控制器新選擇——AX58100
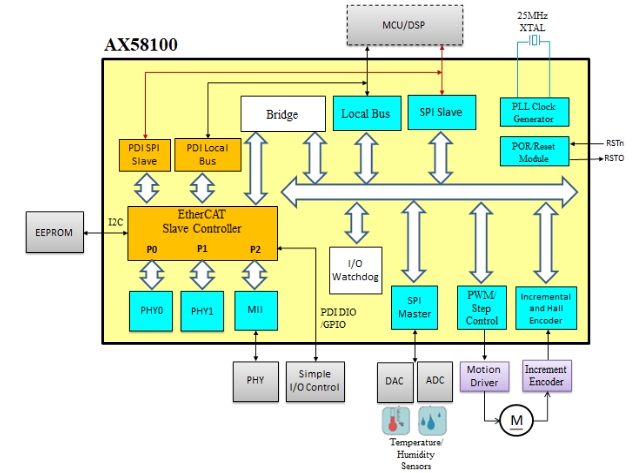
AX58100是一款高性價比EtherCAT從站控制器,其通過了Beckhoff Automation認證,并且內建兩個支持100Mbps全雙工和HP Auto-MDIX的快速以太網物理接口。AX58100能支持所有的EtherCAT系統,包括標準EtherCAT設備(例如CoE, FoE,VoE,等等)。AX58100在工業自動化,驅動/馬達/數據IO控制,數模轉換,模數轉換變頻控制器,影像數據采集,機器人,等工業領域應用方面提供了一個極具性價比的EtherCAT解決方案!
AX58100 提供了一個三通道PWM 控制器或者一個步進式控制器,另外還有一個額外的(ABZ)/Hall 編碼器接口 使其能閉環式管理諸如驅動/馬達的控制應用;提供了一個SPI master來管理DAC/ADC轉換器的控制應用以及影像數據采集應用;當然還提供了一個I/O watchdog(看門狗定時器)和一個emergency stop input(緊急停止) 為了一些工業自動化的安全應用.
AX58100 提供了SPI slave 和 Local busPDI(Process Data Interfaces) 兩種接口讓系統設計者更容易地執行一些標準的EtherCAT 協議使其能用于那些傳統 非EtherCAT MCU和DSP 工業平臺。AX58100 提供了一個 可配置化的SPI 總線來提高提高I slave的帶寬
以下是產品架構圖:
產品主要優勢:
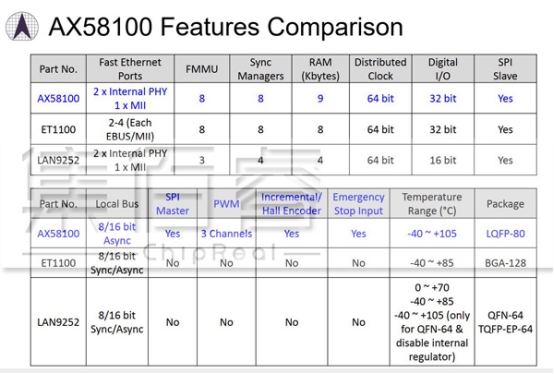
兩個內建PHY的網口+一個MII界面
內建SPI master界面(可支援8個SPI通道)
內建PWM or 步進/轉向控制器,ABZ/霍爾編碼器
內建32個數位I/O控制訊號
內建2個過程數據(PDI)界面(SPI Slave/Local Bus)
支援緊急停止輸入功能
超高性價比,訂貨交期短
簡單易用的SPI Slave 控制界面,完美兼容ET1100
支持工業級規格(-40至105°C),常規封裝(LQFP80)
以下是AX58100與其它同類產品的橫向比較:
我司是亞信指定授權IDH,并提供AX58100開發所需的相關技術支持。若客戶有相關咨詢,請聯系以下窗口:
深圳市集佰睿科技有限公司
宋先生 15011850965
電話:0755-83258886
地址:廣東省深圳市福田區華強北華強廣場D座7樓
郵件:song@chipreal.net
-
ASIX
+關注
關注
0文章
11瀏覽量
9306 -
ethercat
+關注
關注
18文章
655瀏覽量
38605 -
ax58100
+關注
關注
0文章
12瀏覽量
7776
發布評論請先 登錄
相關推薦
使用C2000 EtherCAT從站控制器的SMI進行以太網PHY配置

伺服控制機器人的控制方式有哪些
人形機器人控制器之MCU、DSP、AI芯片
EtherCAT從站轉CANopen主站協議網關(JM-ECT-COP)
如何使用PLC控制機器人
簡述工業機器人控制系統的特點
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
基于飛凌嵌入式RK3568J核心板的工業機器人控制器應用方案
基于OpenVINO?的諾達佳機器人控制器實戰

電機控制領域如何實現CANopen設備接入EtherCAT主站控制器






 工商網監
工商網監
評論