") 教你如何選工業(yè)機器人視覺
教你如何選工業(yè)機器人視覺
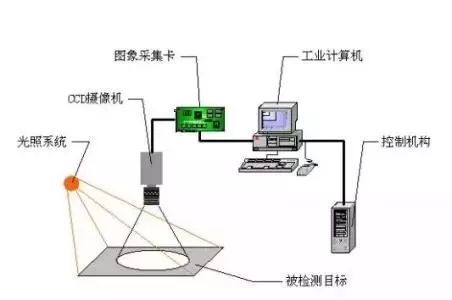
工業(yè)機器人的眼睛視覺系統(tǒng)通常由以下構(gòu)成
01
攝像頭和光學部件
這一類通常含有一個或多個攝像頭和鏡頭(光學部件),用于拍攝被檢測的物體。根據(jù)應(yīng)用,攝像頭可以基于如下標準,黑白、復(fù)合彩色(Y/C),RGB彩色,非標準黑白(可變掃描),步進掃描(progressive-scan)或線掃描。
02
燈光
燈光用于照亮部件,以便從攝像頭中拍攝到更好的圖像,燈光系統(tǒng)可以在不同形狀、尺寸和亮度。一般的燈光形式是高頻熒光燈、LED、白熾燈和石英鹵(quartz-halogen)光纖。
03
部件傳感器
通常以光柵或傳感器的形式出現(xiàn)。當這個傳感器感知到部件靠近,它會給出一個觸發(fā)信號。當部件處于正確位置時,這個傳感器告訴機器視覺系統(tǒng)去采集圖像。
04
圖像采集卡
也稱為視頻抓取卡,這個部件通常是一張插在 PC上的卡。
這張采集卡的作用將攝像頭與 PC連接起來。它從攝像頭中獲得數(shù)據(jù)(模擬信號或數(shù)字信號),然后轉(zhuǎn)換成PC 能處理的信息。
它同時可以提供控制攝像頭參數(shù)(例如觸發(fā)、曝光時間、快門速度等等)的信號。圖像采集卡形式很多,支持不同類型的攝像頭,不同的計算機總線。
05
PC平臺
計算機是機器視覺的關(guān)鍵組成部分。
應(yīng)用在檢測方面,通常使用 Pentium或更高的 CPU。一般來講,計算機的速度越快,視覺系統(tǒng)處理每一張圖片的時間就越短。
由于在制造現(xiàn)場中,經(jīng)常有振動、灰塵、熱輻射等等,所以一般需要工業(yè)級的計算機。
06
檢測軟件
機器視覺軟件用于創(chuàng)建和執(zhí)行程序、處理采集回來的圖像數(shù)據(jù)、以及作出“通過/失敗(PASS/FAIL)”決定。
機器視覺有多種形式(C 語言庫、ActiveX 控件、點擊編程環(huán)境等等),可以是單一功能(例如設(shè)計只用來檢測 LCD或 BGA、對齊任務(wù)等等),也可以是多功能(例如設(shè)計一個套件,包含計量、條形碼閱讀、機器人導(dǎo)航、現(xiàn)場驗證等等)。
07
數(shù)字 I/O和網(wǎng)絡(luò)連接
一旦系統(tǒng)完成這個檢測部分,這部分必須能與外界通信,例如需要控制生產(chǎn)流程、將“通過/失敗(PASS/FAIL)”的信息送給數(shù)據(jù)庫。通常,使用一張數(shù)字 I/O板卡和(或)一張網(wǎng)卡來實現(xiàn)機器視覺系統(tǒng)與外界系統(tǒng)和數(shù)據(jù)庫的通信。
配置一個基于 PC的機器視覺系統(tǒng)認真的計劃和注意細節(jié)能幫助你確保你的檢測系統(tǒng)符合你的應(yīng)用需求。如下是你必需考慮的幾點:
確定你的目標,這可能是最重要的一步?jīng)Q定在這個檢測任務(wù)中你需要實現(xiàn)什么,檢測任務(wù)通常分為如下幾類:
測量或計量
讀取字符或編碼(條形碼)信息。
檢測物體的狀態(tài)
認知和識別特殊的特性 模式識別
將物體與模板進行對比或匹配
為機器或機器人導(dǎo)航檢測流程可以包含只有一個操作或包含多個與檢測任務(wù)相關(guān)的任務(wù)。
為了確認你的任務(wù),首先你應(yīng)該明確為了最大限度檢測部件你需要做的測試,也就是你能考慮到會出現(xiàn)的缺陷。
為了明確什么哪個才是最重要的,最好做一張評估表,列出“必須做”和“可以做”的測試。一旦主要的對測試標準滿意,隨后可以將更多的測試加進去來改善檢測過程,一定要記住,添加測試的同時也會增加檢測的時間。
確定你需要的速度 –系統(tǒng)檢測每一個部件需要多少時間?
這個不只是由 PC的速度決定,還受生產(chǎn)流水線速度的影響。
很多機器視覺包含了時鐘/計時器,所以檢測操作的每一步所需要的時間都可以準確測量,從這些數(shù)據(jù),我們就可以修改我們的程序以滿足時間上的要求。通常,一個基于 PC 的機器視覺系統(tǒng)每一秒可以檢測 20-25 個部件,與檢測部件的多少和處理程序以及計算機的速度有密切關(guān)系。
聰明地選擇你的硬件
一套機器視覺系統(tǒng)的性能與它的部件密切相關(guān)。在選擇的過程中,有很多捷徑特別在光學成像上可能很大程度降低系統(tǒng)的效率。如下是在選擇部件時你必須緊記的幾個基本原則:
01
攝像頭 攝像頭的選擇與應(yīng)用的需求直接相關(guān),通常考慮三點:
a)黑白還是彩色;
b)部件/目標的運動;
c)圖像分辨率。
在檢測應(yīng)用中大部分使用黑白攝像頭,因為黑白圖像能提供 90%可視數(shù)據(jù),并且比彩色便宜。彩色攝像頭主要用于一些需要分析彩色圖像的場合里。根據(jù)部件在檢測時是否移動,決定我們選擇標準隔行掃描攝像頭還是逐行掃描攝像頭。另外,圖像的分辨率必須足夠高,以提供檢測任務(wù)需要的足夠的數(shù)據(jù)。最后,攝像頭必須質(zhì)量好和可以避免工業(yè)現(xiàn)場中的振動、灰塵和熱的影響。
02
光學部件和照明這個至關(guān)重要的因素往往被人所忽略。
當你使用一個很差的光學部件或照明,就算你使用最好的機器視覺系統(tǒng),它表現(xiàn)出的性能甚至比不上一個配上良好光學部件和適當照明的低能力系統(tǒng)。光學部件的目標是產(chǎn)生最好和最大可用面積的圖像,并且提供最好的圖像分辨率。照明的目標是照亮需要測量或檢測的部分的關(guān)鍵特征。通常,照明系統(tǒng)的設(shè)計由如下因素決定:顏色、紋理、尺寸、外形、反射率等等。
03
圖像采集卡雖然圖像采集卡只是完整的機器視覺系統(tǒng)的一個部件,但是它扮演一個非常重要的角色。
圖像采集卡直接決定了攝像頭的接口:黑白、彩色、模擬、數(shù)字等等。
使用模擬輸入的圖像采集卡,目標是盡量不變地將攝像頭采集的圖像轉(zhuǎn)換為數(shù)字數(shù)據(jù)。使用不正確的圖像采集卡可能得到錯誤的數(shù)據(jù)。
工業(yè)用的圖像采集卡通常用于檢測任務(wù),多媒體采集卡由于它通過自動增益控制、邊沿增強和顏色增強電路來更改圖像數(shù)據(jù),所以不用在這個領(lǐng)域里。使用數(shù)字輸入的圖像采集卡的目標是將攝像頭輸出的數(shù)字圖像數(shù)據(jù)轉(zhuǎn)換并輸送到 PC 中作處理。
01
考慮各種變化:
人類的眼睛和大腦可以在不同的條件下識別目標,但是機器視覺系統(tǒng)就不是這樣多才多藝了,它只能按程序編寫的任務(wù)來工作。了解你的系統(tǒng)能看到什么和不能看到什么能幫助你避免失敗(例如將好的部件認為是壞的)或其它檢測錯誤。一般要考慮的包括部件顏色、周圍光線、焦點、部件的位置和方向和背景顏色的大變化。
02
正確選擇軟件:
機器視覺軟件是檢測系統(tǒng)中的智能部分,也是最核心的部分。軟件的選擇決定了你編寫調(diào)試檢測程序的時間、檢測操作的性能等等。
機器視覺提供了圖形化編程界面 (通常稱為“Point&Click”) 通常比其他編程語言(例如 VisualC++)容易,但是在你需要一些特殊的特征或功能時有一定的局限性。基于代碼的軟件包,盡管非常困難和需要編碼經(jīng)驗,但在編寫復(fù)雜的特殊應(yīng)用檢測算法具備更大的靈活性。一些機器視覺軟件同時提供了圖形化和基于代碼的編程環(huán)境,提供兩方面最好的特征,提供了很多靈活性,滿足不同的應(yīng)用需求。
03
通信和記錄數(shù)據(jù):
機器視覺系統(tǒng)的總的目標是通過區(qū)分好和壞的部件來實現(xiàn)質(zhì)量檢測。為了實現(xiàn)這一功能,這個系統(tǒng)需要與生產(chǎn)流水線通信,這樣才可以在發(fā)現(xiàn)壞的部件是做某種動作。通常這些動作是通過數(shù)字 I/O 板,這些板與制造流水線中的 PLC相連,這樣壞的部件就可以跟好的部件分離。
例如,機器視覺系統(tǒng)可以與網(wǎng)絡(luò)連接,這樣就可以將數(shù)據(jù)傳送給數(shù)據(jù)庫,用于記錄數(shù)據(jù)以及讓質(zhì)量控制員分析為什么會出現(xiàn)廢品。在這一步認真考慮將有助于將機器視覺系統(tǒng)無縫與生產(chǎn)流水線結(jié)合起來。需要考慮的問題是:
使用了什么類型的 PLC,它的接口如何?
需要什么類型的信號?
現(xiàn)在使用或必須使用什么類型的網(wǎng)絡(luò)?
在網(wǎng)絡(luò)上傳送的文件格式是什么?通常使用 RS-232端口與數(shù)據(jù)庫通信,來實現(xiàn)對數(shù)據(jù)的紀錄。
為以后做準備:當你為機器視覺系統(tǒng)選擇部件時,時刻記住未來的生產(chǎn)所需和有可能發(fā)生的變動。這些將直接影響你的機器視覺軟硬件是否容易更改來滿足以后新的任務(wù)。提前的準備將不僅僅節(jié)約你的時間,而且通過在將來重用現(xiàn)有的檢測任務(wù)可以降低整個系統(tǒng)的價格。機器視覺系統(tǒng)的性能由最差的部分決定(就像一個木桶的容量由最短的一個木塊決定),精度則由它能獲取的信息決定。花時間和精力合理配置系統(tǒng)就可以建造一個零故障和有彈性的視覺檢測系統(tǒng)。
-
機器視覺
+關(guān)注
關(guān)注
161文章
4345瀏覽量
120111 -
工業(yè)機器人
+關(guān)注
關(guān)注
91文章
3351瀏覽量
92560
原文標題:收藏 | 教你如何選工業(yè)機器人視覺
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
解鎖機器人視覺與人工智能的潛力,從“盲人機器”改造成有視覺能力的機器人(上)

工業(yè)機器人常用的編程方式
工業(yè)機器人視覺技術(shù)的應(yīng)用分為哪幾種?
機器人視覺與計算機視覺的區(qū)別與聯(lián)系
機器人視覺的應(yīng)用范圍
機器人視覺的作用是什么
abb工業(yè)機器人的編程語言是什么
工業(yè)機器人控制系統(tǒng)的基本組成有哪些
工業(yè)機器人中視覺控制器的種類和作用
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設(shè)計
工業(yè)4.0中的機器人向協(xié)作機器人演進
視覺機器人焊接的研究現(xiàn)狀

基于智能制造的工業(yè)機器人應(yīng)用實踐
LabVIEW的六軸工業(yè)機器人運動控制系統(tǒng)
工業(yè)機器人產(chǎn)業(yè)發(fā)展及應(yīng)用現(xiàn)狀






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論